| Citation: | CHEN Qingyang, XIN Hongbo, WANG Yujie, et al. A rapid path planning method for multiple UAVs to cooperative strike[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1145-1153. doi: 10.13700/j.bh.1001-5965.2021.0022(in Chinese)

|
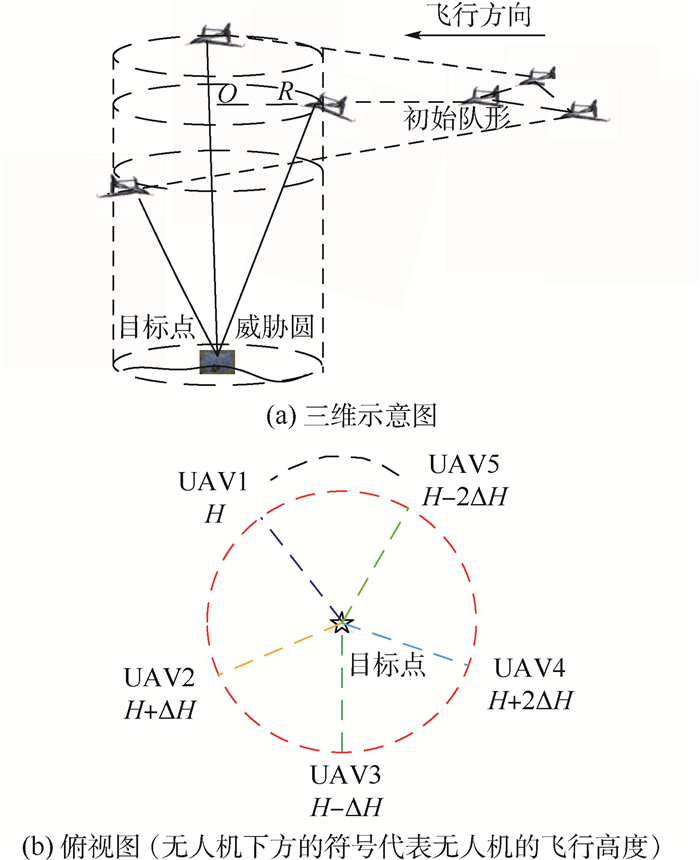
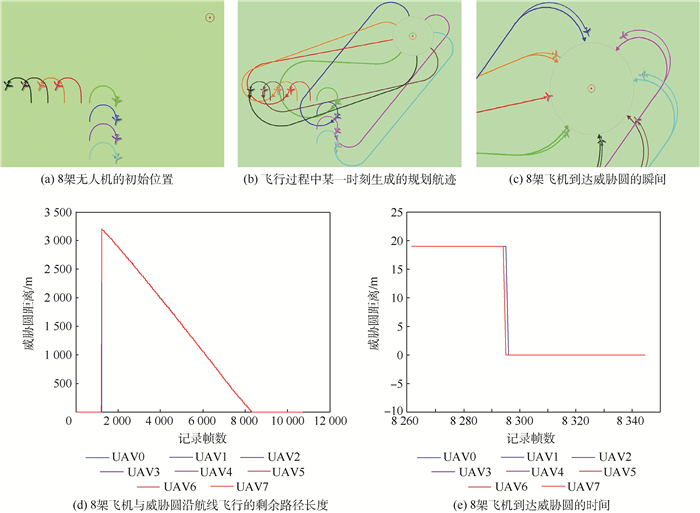
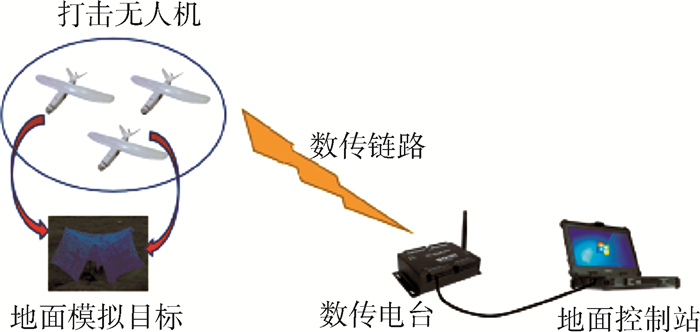
Focusing on the cooperative strike problem to important with multiple suicide UAVs, a cooperative striking strategy based on hierarchical space distribution is proposed. The strategy is proposed with the vehicle kinematic constraint, the collision constraint of UAVs, and the space-time cooperative constraint. With the proposed strategy, the collision constraint can be solved. What's more, with the strategy, the resistibility of the UAVs to the recovery system of the target can be improved, and the chance of survival can be increased. A rapid path planning method for multiple UAVs with space cooperative requirements is proposed. The Dubins curve is combined in the method, and the exponential increment of computation with the number of UAVs is transformed intoa polynomial form. The real-time requirement can be satisfied with the method, and sub-optimal trajectories can be generated. Simulation and flight experiments are carried out, and the results show that the UAVs can be guided to the target with the generated paths effectively, and the effectiveness of the proposed method is verified.

| [1] |
KIM H G, KIM H J. Backstepping-based impact time control guidance law for missiles with reduced seeker field-of-view[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(1): 82-94. doi: 10.1109/TAES.2018.2848319
|
| [2] |
ZENG J, DOU L H, XIN B. A joint mid-course and terminal course cooperative guidance law for multi-missile salvo attack[J]. Chinese Journal of Aeronautics, 2018, 31(6): 1311-1326. doi: 10.1016/j.cja.2018.03.016
|
| [3] |
ZHEN Z Y, XING D J, GAO C. Cooperative search-attack mission planning for multi-UAV based on intelligent self-organized algorithm[J]. Aerospace Science and Technology, 2018, 76: 402-411. doi: 10.1016/j.ast.2018.01.035
|
| [4] |
DUAN H B, ZHAO J X, DENG Y M, et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 706-720. doi: 10.1109/TAES.2020.3029624
|
| [5] |
LIU X, LIU L, WANG Y J. Minimum time state consensus for cooperative attack of multi-missile systems[J]. Aerospace Science and Technology, 2017, 69: 87-96. doi: 10.1016/j.ast.2017.06.016
|
| [6] |
HE S M, KIM M G, SONG T, et al. Three-dimensional salvo attack guidance considering communication delay[J]. Aerospace Science and Technology, 2018, 73: 1-9. doi: 10.1016/j.ast.2017.11.019
|
| [7] |
KANG S, WANG J N, LI G, et al. Optimal cooperative guidance law for salvo attack: An MPC-based consensus perspective[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(5): 2397-2410. doi: 10.1109/TAES.2018.2816880
|
| [8] |
彭志红, 孙琳, 陈杰. 基于改进差分进化算法的无人机在线低空突防航迹规划[J]. 北京科技大学学报, 2012, 34(1): 96-101. https://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201201018.htm
PENG Z H, SUN L, CHEN J. Online path planning for UAV low-altitude penetration based on an improved differential evolution algorithm[J]. Journal of University of Science and Technology Beijing, 2012, 34(1): 96-101(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-BJKD201201018.htm
|
| [9] |
SHANMUGAVEL M, TSOURDOSY A, ZBIKOWSKIZ R, et al. Path planning of multiple UAVs using Dubins sets[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2005: 1-17.
|
| [10] |
SHANMUGAVEL M, TSOURDOSY A, WHITE B, et al. Cooperative path planning of multiple UAVs using Dubins paths with clothoid arcs[J]. Control Engineering Practice, 2010, 18(9): 1084-1092. doi: 10.1016/j.conengprac.2009.02.010
|
| [11] |
SHANMUGAVEL M, TSOURDOSY A, ZBIKOWSKIZ R, et al. 3D Dubins sets based coordinated path planning for swarm of UAVs[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2006: 1-20.
|
| [12] |
SHANMUGAVEL M, TSOURDOSY A, ZBIKOWSKIZ R, et al. A solution to simultaneous arrival of multiple UAVs using Pythagorean Hodograph curves[C]//Proceedings of the 2006 American Control Conference. Piscataway: IEEE Press, 2006: 2813-2818.
|
| [13] |
SHANMUGAVEL M, TSOURDOSY A, ZBIKOWSKIZ R, et al. 3D path planning for multiple UAVs using Pythagorean Hodograph curves[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Reston: AIAA, 2007: 1-14.
|
| [14] |
ASKARI A, MORTAZAVI M, TALEBI H, et al. A new approach in UAV path planning using Bezier-Dubins continuous curvature path[J]. Part G: Journal of Aerospace Engineering, 2016, 230(6): 1103-1113.
|
| [15] |
丁超, 魏瑞轩, 周凯. 基于时域映射的多无人机系统给定时间分布式最优集结[J]. 北京航空航天大学学报, 2021, 47(2): 315-322. doi: 10.13700/j.bh.1001-5965.2020.0215#viewType=Abstract
DING C, WEI R X, ZHOU K. Distributed optimal rendezvous of multi-UAV systems in prescribed time based on time-domain transformation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 315-322(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0215#viewType=Abstract
|
| [16] |
陈旿, 张鑫, 金鑫, 等. 一种多智能体协同信息一致性算法[J]. 航空学报, 2017, 38(12): 321222. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201712020.htm
CHEN W, ZHANG X, JIN X, et al. A cooperative information consensus algorithm for multi-agent system[J]. Acta Aeronauticaet Astronautica Sinica, 2017, 38(12): 321222(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201712020.htm
|
| [17] |
DUBINS L E. On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J]. American Journal of Mathematics, 1957, 79(3): 497-516.
|
| [18] |
CHEN Q Y, LU Y F, JIA G W, et al. Path planning for UAVs formation reconfiguration based on Dubins trajectory[J]. Journal of Central South University, 2018, 25(11): 2664-2676.
|
| [19] |
XIN H B, CHEN Q Y, WANG Y J, et al. Terminal guidance simulation and flight test for small UCAV[C]//International Conference on Control, Automation and Diagnosis. Piscataway: IEEE Press, 2019: 1-6.
|
| [20] |
李樾, 陈清阳, 侯中喜. 自适应引导长度的无人机航迹跟踪方法[J]. 北京航空航天大学学报, 2017, 43(7): 1481-1490. doi: 10.13700/j.bh.1001-5965.2016.0522#viewType=Abstract
LI Y, CHEN Q Y, HOU Z X. Path following method with adaptive guidance length for unmanned aerial vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(7): 1481-1490(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0522#viewType=Abstract
|
| [21] |
CHEN Q Y, LI Y. UAVs formation flight control based on following of the guidance points[C]//Proceedings of 2016 IEEE Chinese Guidance, Navigation and Control Conference. Piscataway: IEEE Press, 2016: 730-735.
|

Figures(8) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: