| Citation: | DAI Hongde, ZHANG Xiaoyu, ZHENG Baidong, et al. Inertial pedestrian navigation algorithm based on zero velocity update and attitude self-observation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1135-1144. doi: 10.13700/j.bh.1001-5965.2021.0037(in Chinese)

|
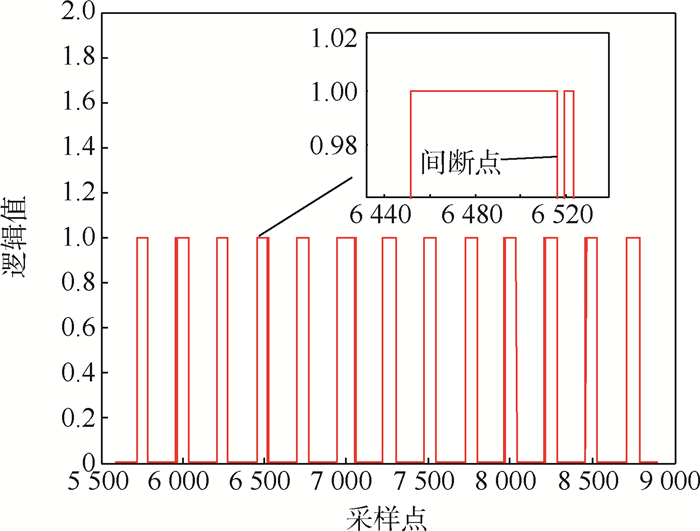
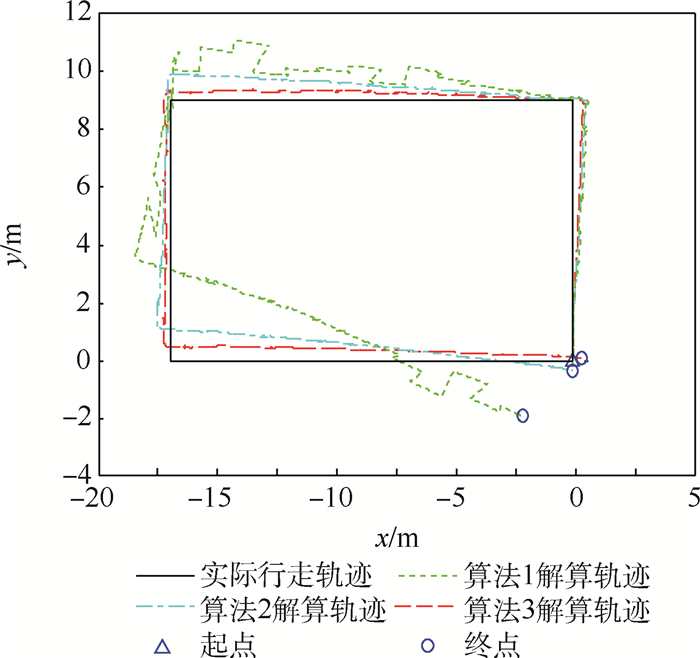
Aiming at the problem of reduced navigation accuracy caused by the divergence of the heading angle in inertial pedestrian navigation, an inertial pedestrian navigation algorithm based on zero velocity correction and attitude self-observation is proposed. A four-condition zero velocity detection algorithm is used to detect the zero velocity interval in the walking gait. In the detected zero velocity interval, the principle of the zero velocity update is used to construct the observation of the velocity error; the characteristic that only gravity acts and the heading angle remains unchanged in the zero velocity intervals is used to construct the observation of the attitude angle error. Then, the attitude angle, velocity and position error in the zero velocity interval are estimated by Kalman filtering. The error correction of pedestrian navigation is carried out using the obtained state estimation to further improve the accuracy of inertial pedestrian navigation. Actual walking experiments show that in the rectangular path, the average value of navigation trajectory relative error of this algorithm is only 0.98%, which is reduced by 78.11% compared with the zero velocity update algorithm and the standard deviation of navigation trajectory error of this algorithm is only 0.14 m, which is reduced by 88.62% compared with the zero velocity update algorithm. In the closed loop path of the classical 400 m playground, the relative position error of the solution end point is only 1.18%. The solved trajectory has a high degree of matching with the actual trajectory, which has good application value.

| [1] |
HUANG H, GARTNER G, KRISP J M, et al. Location based services: Ongoing evolution and research agenda[J]. Journal of Location Based Services, 2018, 12(2): 63-93. doi: 10.1080/17489725.2018.1508763
|
| [2] |
XIN S, LI X, GENG J, et al. The implementation of multi-GNSS real-time precise point positioning service system: GPS/GLONASS[C]//2017 Forum on Cooperative Positioning and Service (CPGPS). Piscataway: IEEE Press, 2017: 202-207.
|
| [3] |
SUN W, XUE M, YU H, et al. Augmentation of fingerprints for indoor WiFi localization based on Gaussian process regression[J]. IEEE Transactions on Vehicular Technology, 2018, 67(11): 10896-10905. doi: 10.1109/TVT.2018.2870160
|
| [4] |
ZHUANG Y, YANG J, LI Y, et al. Smartphone-based indoor localization with bluetooth low energy beacons[J]. Sensors, 2016, 16(5): 596. doi: 10.3390/s16050596
|
| [5] |
QI J, LIU G P. A robust high-accuracy ultrasound indoor positioning system based on a wireless sensor network[J]. Sensors, 2017, 17(11): 2554. doi: 10.3390/s17112554
|
| [6] |
SUN W, DING W, YAN H F, et al. Zero velocity interval detection based on a continuous hidden Markov model in micro inertial pedestrian navigation[J]. Measurement Science and Technology, 2018, 29(6): 7.
|
| [7] |
FOXLIN E. Pedestrian tracking with shoe-mounted inertial sensors[J]. IEEE Computer Graphics and Applications, 2005, 25(6): 38-46. doi: 10.1109/MCG.2005.140
|
| [8] |
徐元, 陈熙源, 李庆华, 等. 一种基于双IMU框架的室内个人导航方法[J]. 中国惯性技术学报, 2015, 23(6): 714-717. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201506003.htm
XU Y, CHEN X Y, LI Q H, et al. An indoor personal navigation method based on double IMU framework[J]. Chinese Journal of Inertial Technology, 2015, 23(6): 714-717(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201506003.htm
|
| [9] |
ABDULRAHIM K, HIDE C, MOORE T, et al. Aiding low cost inertial navigation with building heading for pedestrian navigation[J]. Journal of Navigation, 2011, 64(2): 219-233. doi: 10.1017/S0373463310000573
|
| [10] |
WANG Q, YIN J, NOURELDIN A, et al. Research on an improved method for foot-mounted inertial/magnetometer pedestrian-positioning based on the adaptive gradient descent algorithm[J]. Sensors, 2018, 18(12): 4105. doi: 10.3390/s18124105
|
| [11] |
QIU S, WANG Z L, ZHAO H Y, et al. Inertial/magnetic sensors based pedestrian dead reckoning by means of multi-sensor fusion[J]. Information Fusion, 2018, 39: 108-119. doi: 10.1016/j.inffus.2017.04.006
|
| [12] |
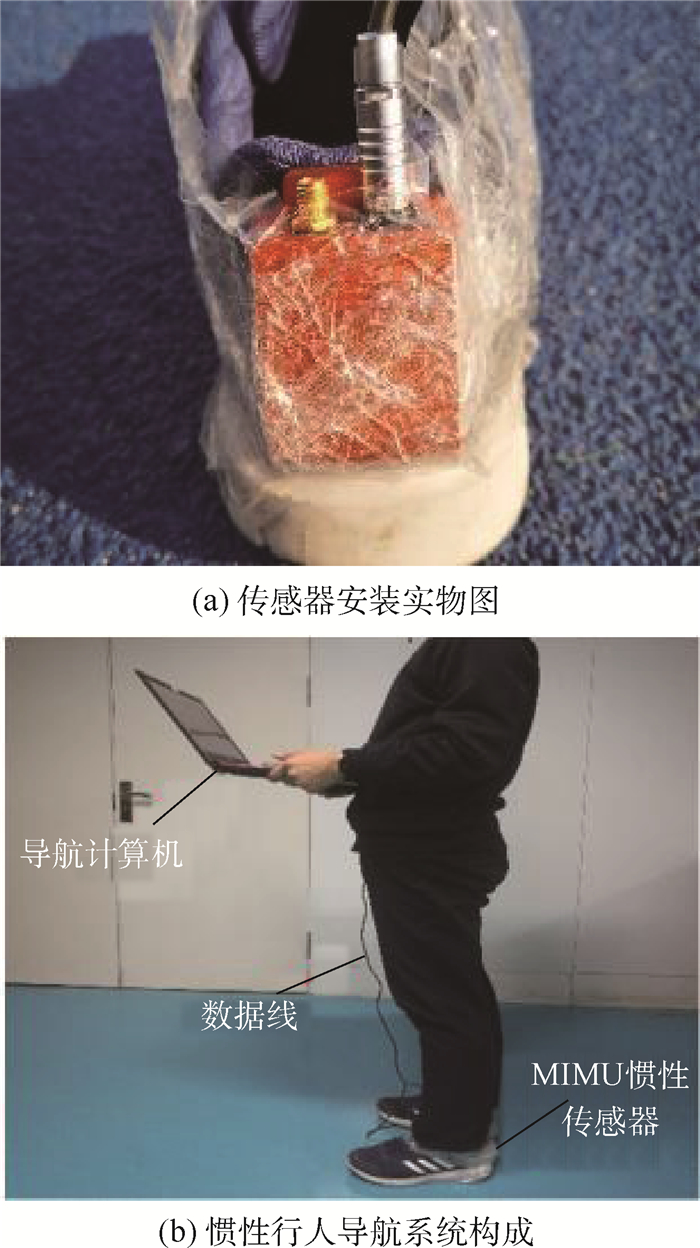
郑伟伟, 戴邵武, 王希彬, 等. 惯性行人导航系统传感器安装位置研究[J]. 传感技术学报, 2020, 33(6): 815-824. doi: 10.3969/j.issn.1004-1699.2020.06.006
ZHENG W W, DAI S W, WANG X B, et al. Research on sensor installation position of inertial pedestrian navigation system[J]. Chinese Journal of Sensors and Actuators, 2020, 33(6): 815-824(in Chinese). doi: 10.3969/j.issn.1004-1699.2020.06.006
|
| [13] |
戴洪德, 李松林, 周绍磊, 等. 基于伪标准差和N-P准则的行人导航零速检测[J]. 中国惯性技术学报, 2018, 26(6): 701-707. https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201806001.htm
DAI H D, LI S L, ZHOU S L, et al. Zero speed detection of pedestrian navigation based on pseudo standard deviation and N-P criterion[J]. Chinese Journal of Inertial Technology, 2018, 26 (6): 701-707(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ201806001.htm
|
| [14] |
陈国良, 杨洲. 基于加速度量测幅值零速检测的计步算法研究[J]. 武汉大学学报(信息科学版), 2017, 42(6): 726-730. https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201706003.htm
CHEN G L, YANG Z. Research on step-counting algorithm based on accelerated measurement amplitude zero velocity detection[J]. Geomatics and Information Science of Wuhan University, 2017, 42(6): 726-730(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-WHCH201706003.htm
|
| [15] |
ZHENG L, ZHOU W, TANG W, et al. A 3D indoor positioning system based on low-cost MEMS sensors[J]. Simulation Modelling Practice and Theory, 2016, 65: 45-56. doi: 10.1016/j.simpat.2016.01.003
|
| [16] |
周绍磊, 李松林, 戴洪德, 等. 一种优化高度通道的行人导航算法[J]. 海军航空工程学院学报, 2018, 33(5): 60-66. https://www.cnki.com.cn/Article/CJFDTOTAL-HJHK201805010.htm
ZHOU S L, LI S L, DAI H D, et al. A pedestrian navigation algorithm for optimizing elevation channel[J]. Journal of Naval Aeronautical Engineering Institute, 2018, 33(5): 60-66(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HJHK201805010.htm
|
| [17] |
秦永元. 惯性导航[M]. 北京: 科学出版, 2014: 4-7.
QIN Y Y. Inertial navigation[M]. Beijing: Science Press, 2014: 4-7(in Chinese).
|

Figures(9) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: