YE Wen, LIU Yanhong, WANG Bo, et al. Global estimation method based on least square fitting for distributed POS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 862-869. doi: 10.13700/j.bh.1001-5965.2019.0345(in Chinese)
Citation:
MA Min, FAN Guangyong, SUN Yinget al. Improved capacitance imaging biconjugate gradient image reconstruction algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(8): 1489-1494. doi: 10.13700/j.bh.1001-5965.2019.0015(in Chinese)
YE Wen, LIU Yanhong, WANG Bo, et al. Global estimation method based on least square fitting for distributed POS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 862-869. doi: 10.13700/j.bh.1001-5965.2019.0345(in Chinese)
Citation:
MA Min, FAN Guangyong, SUN Yinget al. Improved capacitance imaging biconjugate gradient image reconstruction algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(8): 1489-1494. doi: 10.13700/j.bh.1001-5965.2019.0015(in Chinese)
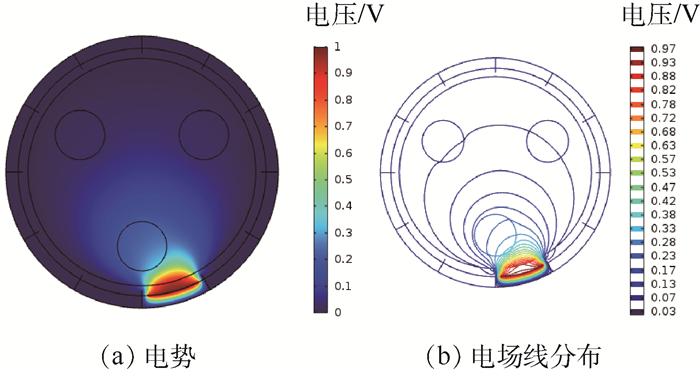
Aimed at the influence of the soft field effect on the inverse electrical capacitance tomography (ECT) problem and to solve the problems that the traditional iterative algorithm used to reconstruct images has numerous iteration times, and that the imaging speed is slow, for the first time, biconjugate gradient (BICG) is applied to the capacitance tomography technology. In order to obtain a better reconstruction effect, a BICG and regularization idea are combined to solve the optimal solution of the inverse problem. The experiment was modeled by COMSOL5.3 software and MATLAB 2014a was used for image reconstruction and image evaluation. The images were reconstructed using Tikhonov, Landweber, conjugate gradient (CG), BICG and improved biconjugate gradient algorithm. Experiments show that the effect of the improved biconjugate gradient algorithm is not only better than other iterative algorithms, but also greatly reduces the time required for image reconstruction. The experimental results show that the biconjugate gradient algorithm has better imaging effect in some complicated flow patterns. The error is as low as 0.2, the correlation coefficient is as high as 0.88, the imaging time is reduced to 2.77 s, and the number of iterations is reduced to 20 times.
ZHANG L F.Application of compressed sensing in electrical capacitance tomography[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(11):2316-2321(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract14344.shtml
[2]
BROWN B E.International society for reef studies[J].Coral Reefs, 1984, 3(1):58. doi: 10.1007/BF00306141
[3]
KAGAWA Y, MURAI T.Numerical simulation of acoustic levitation[C]//IEEE 1985 Ultrasonics Symposium.Piscataway, NJ: IEEE Press, 1985: 198574.
[4]
VAUHKONEN M, KARJALAINEN P A, KAIPIO J P.A Kalman filter approach applied to the tracking of fast movements of organ boundaries[C]//Proceedings of the 20th Annual International Conference of the IEEE Engineering in Medicine and Biology Society.Piscataway, NJ: IEEE Press, 1998: 6345874.
[5]
YANG W Q, SPINK D M, YORK T A, et al.An image reconstruction algorithm based on Landweber's iteration method for electrical capacitance tomography[J].Measurement Science and Technology, 1999, 10(11):1065-1069. doi: 10.1088/0957-0233/10/11/315
[6]
KIM D K, KIM S B, KIM H K.Image processed tracking system of multiple moving objects based on Kalman filter[J].KSME International Journal, 2002, 16(4):427-435. doi: 10.1007/BF03185072
[7]
YANG W Q, STOTT A L, GAMIO J C.Analysis of the effect of stray capacitance on AC-based capacitance transducer for tomography[J].IEEE Transactions on Instrumentation and Measurement, 2003, 52(5):1674-1681. doi: 10.1109/TIM.2003.817925
WANG H X, ZHU X M, ZHANG L F.Conjugate gradient algorithm for electrical capacitance tomography[J].Journal of Tianjin University, 2005, 38(1):1-4(in Chinese).
WANG H X, HU L, ZHAO B.EIT image reconstruction algorithm based on adaptive meshing[C]//Progress in Biomedical Engineering in China—2007 China Biomedical Engineering Joint Academic Annual Meeting, 2007: 5(in Chinese).
YUAN J F.Numerical simulation of incompressible tube flow based on parallel stable double conjugate gradient algorithm[D].Hangzhou: Hangzhou University of Electronic Science and Technology, 2013(in Chinese).
PENG Z, CHEN D F, WANG X F.Adaptive threshold denoising of regularized super-resolution reconstruction process[J].Journal of Computer Applications, 2017, 37(7):2084-2088(in Chinese). doi: 10.3969/j.issn.1001-3695.2017.07.036
CHEN D Y, CHEN Y, WANG L L, et al.Image reconstruction algorithm based on improved Gauss-Newton for electrical capacitance tomography[J].Chinese Journal of Electronics, 2009, 37(4):739-743(in Chinese). doi: 10.3321/j.issn:0372-2112.2009.04.012
[14]
CUI Z, WANG H, YIN W.Electrical capacitance tomography with differential sensor[J].IEEE Sensors Journal, 2015, 15(9):5087-5094. doi: 10.1109/JSEN.2015.2446982
MA P, SI Z N.CT/ECT image fusion method based on wavelet transform[J].Acta Metrologica Sinica, 2018, 39(4):536-540(in Chinese). doi: 10.3969/j.issn.1000-1158.2018.04.18
ZHU R N,WANG B,TANG C Y. Improvement of terrain following flight adaptive angle method under small field of view conditions[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):676-682 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0057.
[3]
DUAN J Z,XIAO C. Parallel MRI reconstruction by using complex convolution and attention mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):85-93 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.1005.
[4]
ZHANG K,LIU Y,HU K. RAW image reconstruction based on multi-scale attention mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(1):257-264 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0959.
ZHU C C,TANG Z L,ZHAO X,et al. Multi-objective hybrid algorithm based on gradient search and evolution mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1940-1951 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0544.
[11]
DUAN J Z,WANG C J. Sensitivity encoding reconstruction algorithm based on multi-category dictionary learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2123-2132 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0571.
[12]
LIU Y J,HAN W,SU X C,et al. Carrier aircraft landing scheduling problem based on improved gray wolf optimization[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):803-813 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0280.
[13]
JIN G D,XUE Y L,TAN L N,et al. Aerial object tracking algorithm for UAVs based on dual-attention shuffling[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):53-65 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0177.
GAO B H,QI H,SHI J W,et al. Multi-parameter reconstruction of soot flame based on active and passive tomography[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1135-1147 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0386.
[16]
ZHANG H,YU Y Z,QIU X T. ORB-SLAM2 algorithm based on improved key frame selection[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):45-52 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0173.
[17]
CHENG B P,FANG Y W,PENG W S,et al. Comprehensive performance evaluation of swarm intelligence algorithms based on improved radar graph method[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2780-2789 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0726.
[18]
LI B,WANG C,DING X Y,et al. Surface defect detection algorithm based on improved YOLOv4[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):710-717 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0301.
[19]
ZHANG Y H,LYU N,MIAO J C,et al. Improved intelligent detection algorithm for SPMA protocol channel state based on recurrent neural network[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):735-744 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0309.
[20]
MA M,YU J,FAN W R. CFRP material detection based on improved joint sparse EIT algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):265-272 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0244.
YE Wen, LIU Yanhong, WANG Bo, et al. Global estimation method based on least square fitting for distributed POS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 862-869. doi: 10.13700/j.bh.1001-5965.2019.0345(in Chinese)
YE Wen, LIU Yanhong, WANG Bo, et al. Global estimation method based on least square fitting for distributed POS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 862-869. doi: 10.13700/j.bh.1001-5965.2019.0345(in Chinese)























 下载:
下载:








 DownLoad:
DownLoad: