GUO Jiangang, CHEN Peng, ZHENG Weiet al. Data fusion algorithm of multi-sensor redundant inertial navigation and its application in self-alignment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2211-2216. doi: 10.13700/j.bh.1001-5965.2019.0604(in Chinese)
Citation:
PAN Haixia, XU Jialu, LI Jintao, et al. Research and implementation of multi-size aerial image positioning method based on CNN[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(11): 2170-2176. doi: 10.13700/j.bh.1001-5965.2019.0045(in Chinese)
GUO Jiangang, CHEN Peng, ZHENG Weiet al. Data fusion algorithm of multi-sensor redundant inertial navigation and its application in self-alignment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2211-2216. doi: 10.13700/j.bh.1001-5965.2019.0604(in Chinese)
Citation:
PAN Haixia, XU Jialu, LI Jintao, et al. Research and implementation of multi-size aerial image positioning method based on CNN[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(11): 2170-2176. doi: 10.13700/j.bh.1001-5965.2019.0045(in Chinese)
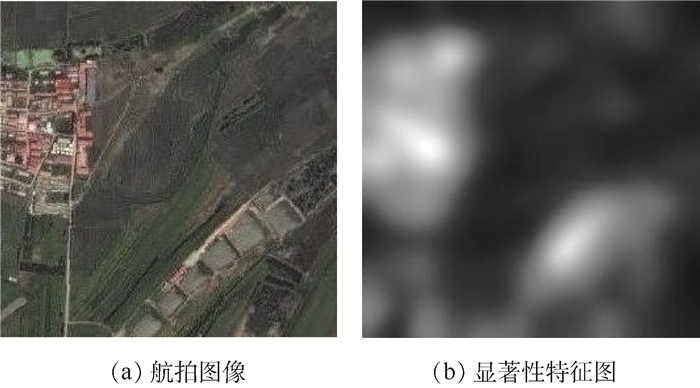
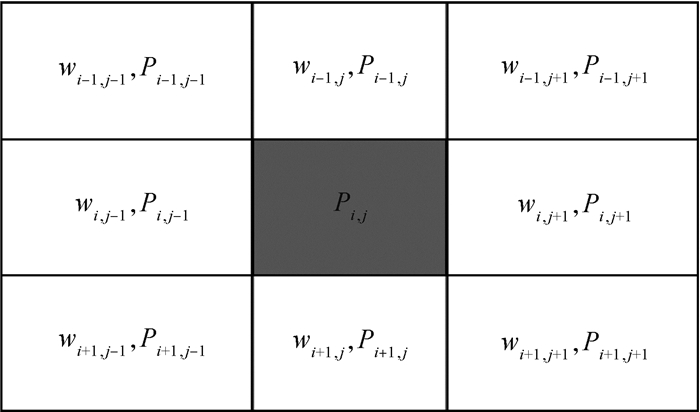
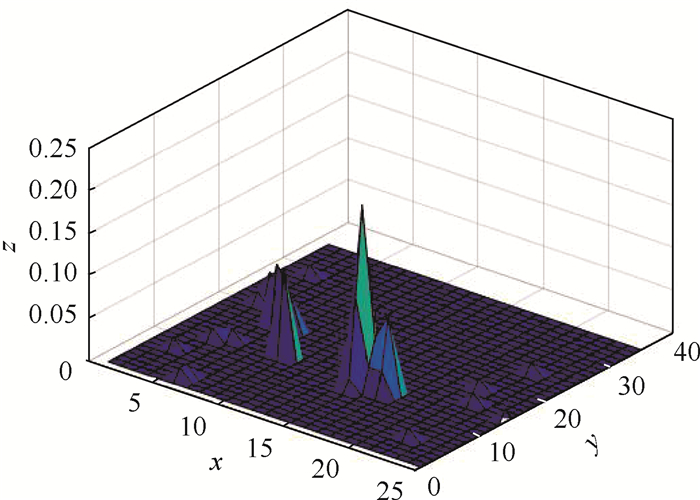
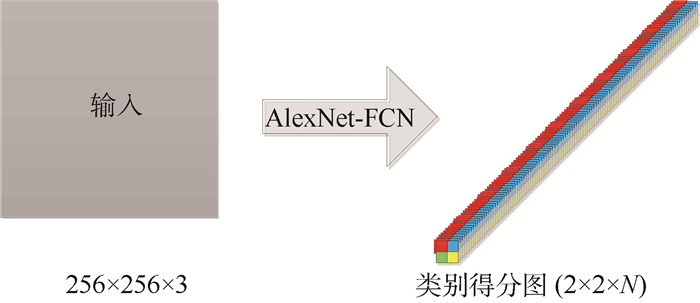
Image positioning is the key of UAV visual navigation. Scene matching navigation is widely used in traditional UAV visual navigation. With the continuous development of computer technology, deep learning technology provides a new way for the realization of visual navigation. In this context, this research mainly focuses on image localization based on convolution neural network. In this paper, based on the vertical reconnaissance of UAV, the aerial image of flight area is divided into several grids of the same size, each grid represents a class of regions, and the convolutional neural network (CNN) is trained by making data sets of grid images. This paper designs a fully convolutional network model based on AlexNet, which integrates saliency features. It effectively implements a sliding window classifier with CNN multi-size input, and proposes a neighborhood saliency reference positioning strategy to filter the classification results, so as to realize the positioning of multi-size aerial images.
PREWITT J M S.Object enhancement and extraction[M]//LIPKIN B S, ROSENFELD A.Picture processing and psychopictorics.Salt Lake City: Academic Press, 1970: 75-149.
[2]
MARR D, HILDRETH E.Theory of edge detection[J].Proceedings of the Royal Society of London, 1980, 207(1167):187-217.
[3]
CANNY J.A computational approach to edge detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986, 8(6):679-698.
MIKOLAJCZYK K, SCHMID C.An affine invariant interest point detector[C]//Proceedings of European Conference on Computer Vision.Berlin: Springer, 2002: 128-142.
[7]
LOWE D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision, 2004, 60(2):91-110.
[8]
BAY H, TUVTELLARS T, VAN GOOL L.SURF: Speeded up robust features[C]//Proceedings of the European Conference on Computer Vision.Berlin: Springer, 2006: 404-417. doi: 10.1007/11744023_32
[9]
RUBLEE E, RABAUD V, KONOLIGE K, et al.ORB: An efficient alternative to SIFT or SURF[C]//IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2012: 2564-2571.
[10]
HAUSDORFF F.Grundzüge der mengenlehre[M].Von Veit:Grundzüge der mengenlehre, 1914:A34-A35.
[11]
HUTTENLOCHER D P, KLANDERMAN G A, RUCKLIDGE W J.Comparing images using the Hausdorff distance[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 1993, 15(9):850-863.
[12]
DUBUISSON M P, JAIN A K.A modified Hausdorff distance for object matching[C]//Proceedings of the 12th International Conference on Pattern Recognition.Piscataway, NJ: IEEE Press, 1994: 566-568.
[13]
ZHAO C, SHI W, DENG Y.A new Hausdorff distance for image matching[J].Pattern Recognition Letters, 2005, 26(5):581-586. doi: 10.1016-j.patrec.2004.09.022/
[14]
BELONGIE S, MALIK J, PUZICHA J, et al.Shape context: A new descriptor for shape matching and object recognition[C]//Proceedings of the 13th International Conference on Neural Information Processing Systems.Cambridge: MIT Press, 2000: 831-837.
[15]
BELONGIE S, MALIK J, PUZICHA J.Shape matching and object recognition using shape context[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(4):509-522.
[16]
KRIZHEVSKY A, SUTSKEVER I, HINTON G E.ImageNet classification with deep convolutional neural networks[J].Communications of the ACM, 2012, 60(6):84-90.
[17]
SERMANET P, EIGEN D, ZHANG X, et al.OverFeat: Integrated recognition, localization and detection using convolutional networks[EB/OL].(2013-12-21)[2019-02-10].https: //arxiv.org/abs/1312.6229.
[18]
HOU X, HAREL J, KOCH C.Image signature:Highlighting sparse salient regions[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(1):194-201.
[19]
OJALA T, PIETIKÄINEN M, MÄENPÄÄ T.Multiresolution gray-scale and rotation invariant texture classification with local binary patterns[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(7):971-987.
GUO Jiangang, CHEN Peng, ZHENG Weiet al. Data fusion algorithm of multi-sensor redundant inertial navigation and its application in self-alignment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2211-2216. doi: 10.13700/j.bh.1001-5965.2019.0604(in Chinese)
GUO Jiangang, CHEN Peng, ZHENG Weiet al. Data fusion algorithm of multi-sensor redundant inertial navigation and its application in self-alignment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2211-2216. doi: 10.13700/j.bh.1001-5965.2019.0604(in Chinese)




 下载:
下载:

















 DownLoad:
DownLoad: