| Citation: | LU Tingting, LI Xiao, ZHANG Yao, et al. A technology for generation of space object optical image based on 3D point cloud model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 274-286. doi: 10.13700/j.bh.1001-5965.2019.0189(in Chinese)

|
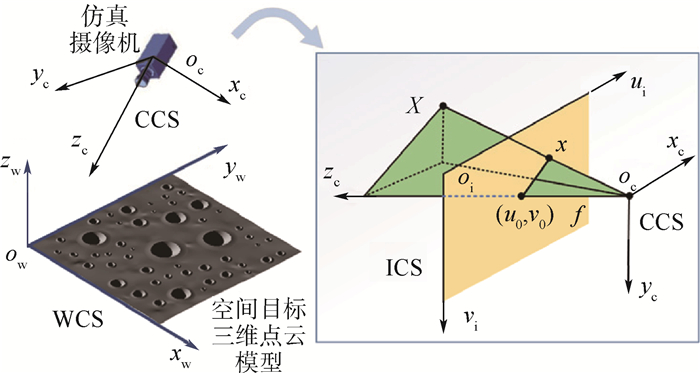
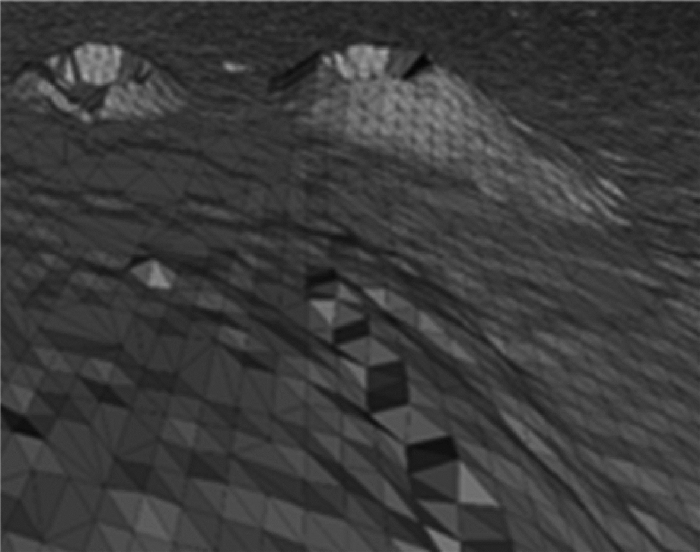
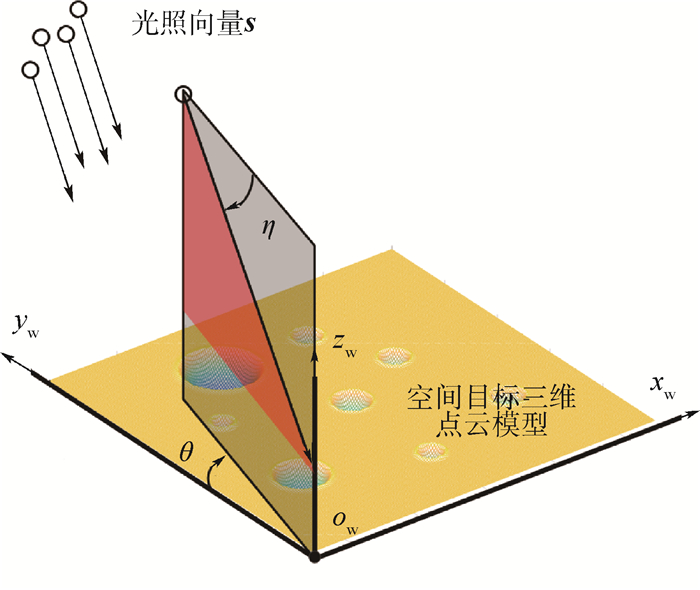
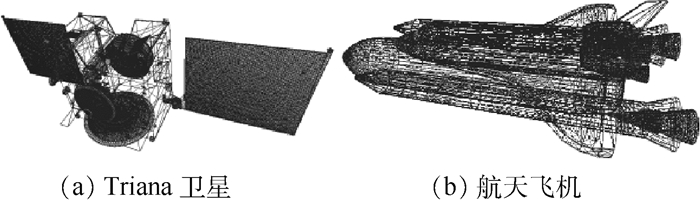
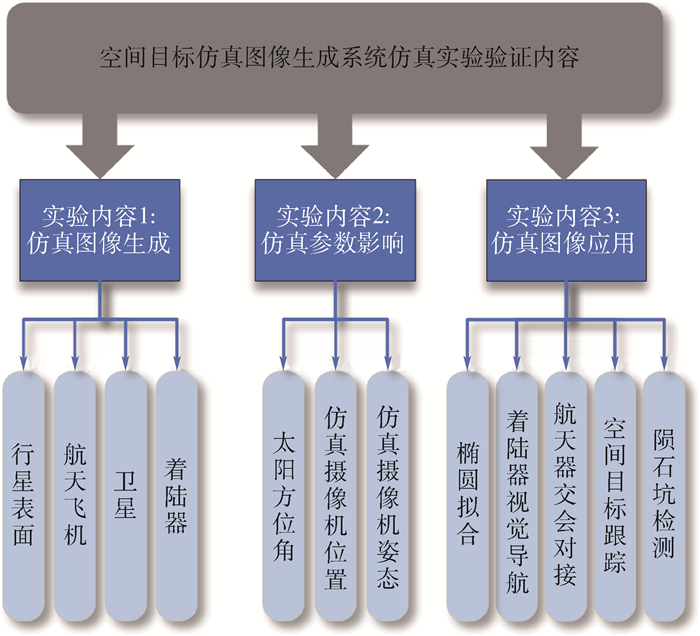
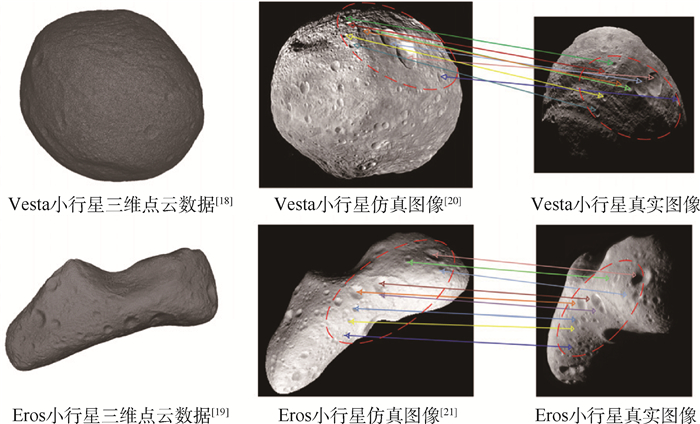
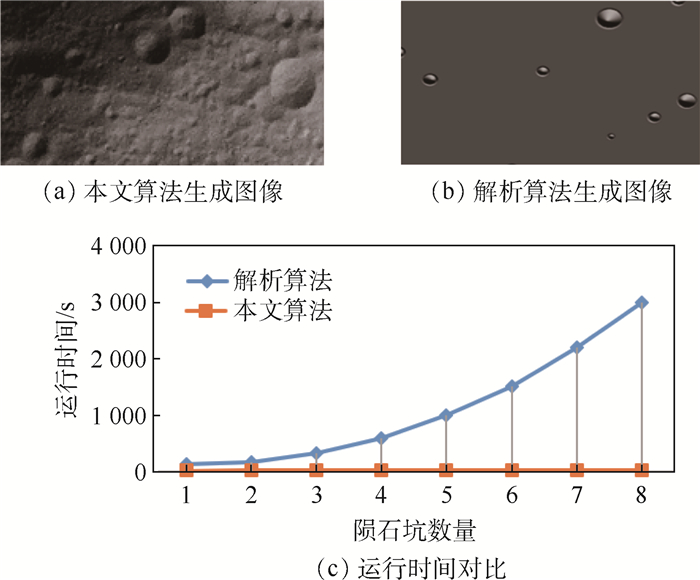
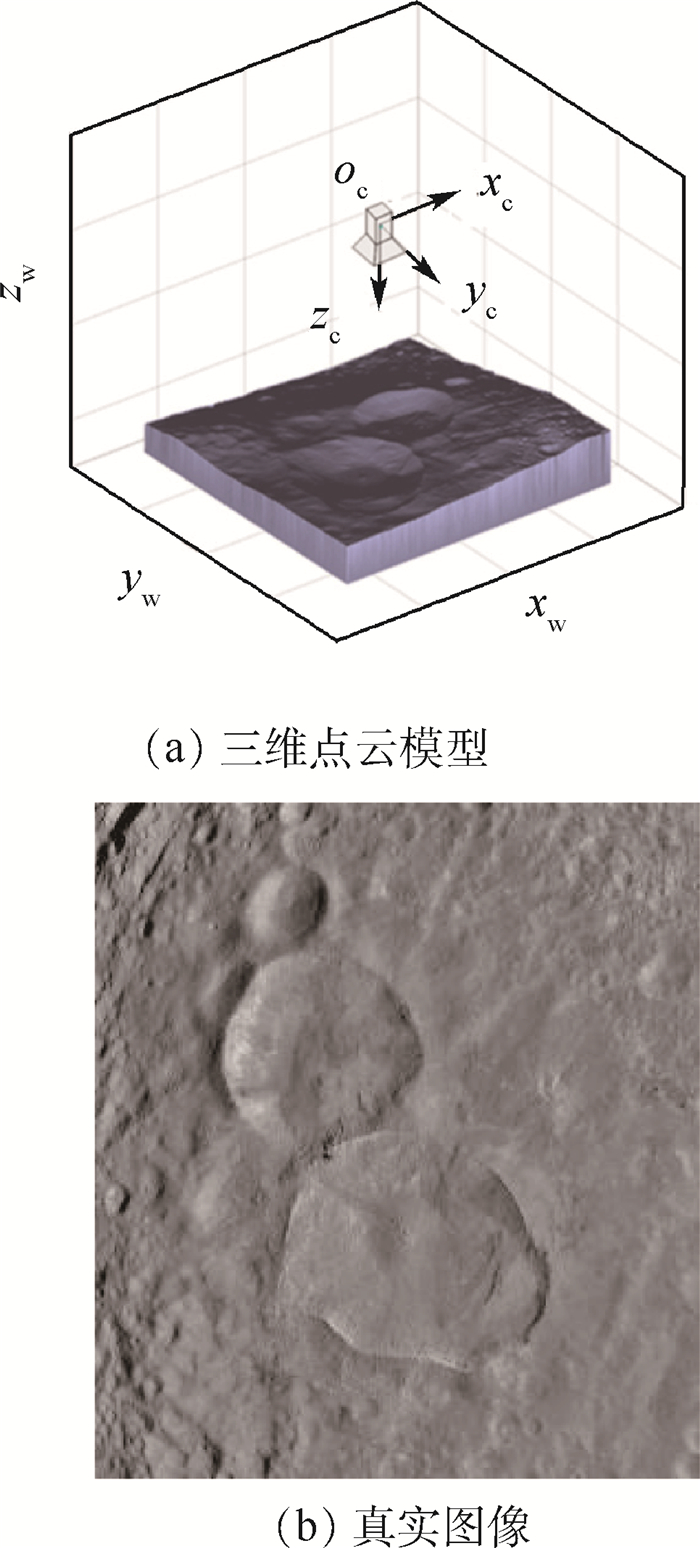
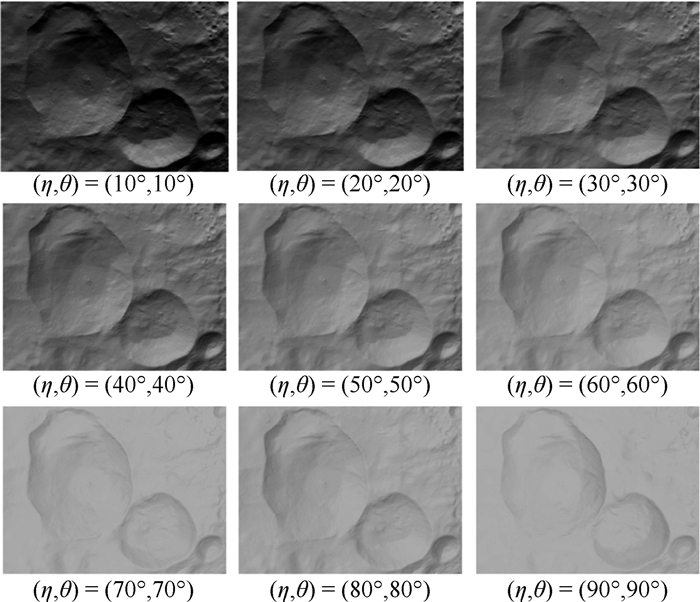
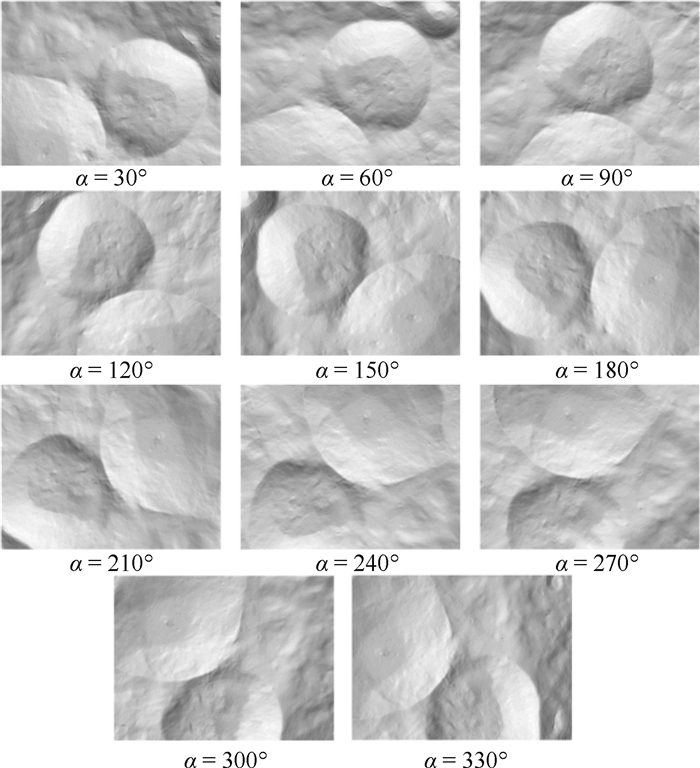
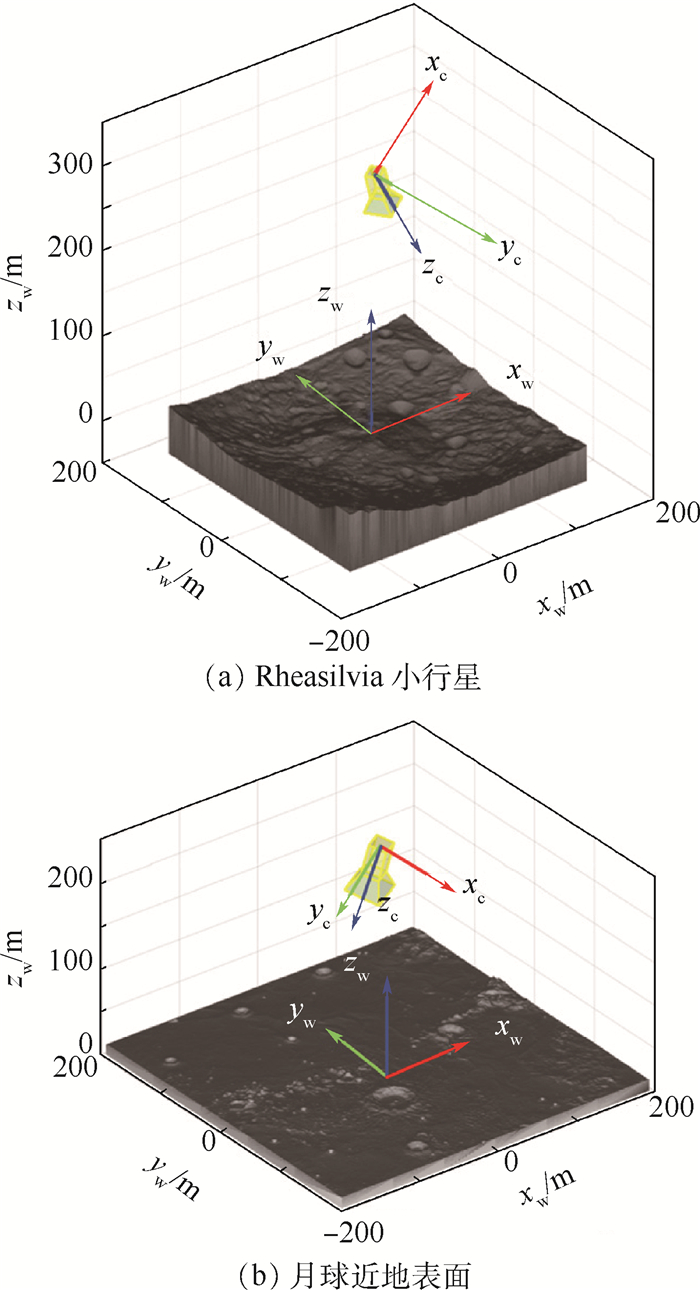
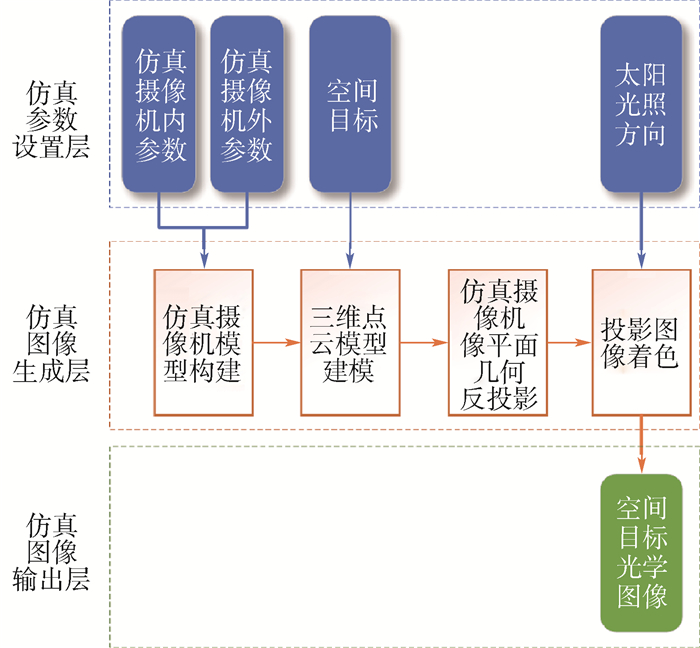
The lack of the prior image data in the space exploration tasks makes it difficult to quantitatively test and evaluate the situation awareness and navigation algorithms based on the optical images. Accordingly, in this paper, we present an algorithm for generating the synthetic space object optical image based on the 3D point cloud model and the basic theory of the projective transformation. First, the 3D point cloud model of the space object and the optical camera model were constructed. Then, the corresponding pairs between all the pixels in the image plane and the space points of the 3D point cloud model were obtained via the basic theory of projective transformation, and subsequently the intensity of each pixel in the image plane was calculated by the lighting direction of its corresponding space point and the Lambertian reflection model, and finally the simulated image was generated. A great deal of simulation experiments demonstrate that the proposed algorithm can produce the more vivid simulated images rapidly than the traditional analytical image generation algorithm, and the generated images can be applied to testing and evaluating the typical space application algorithms qualitatively and quantitatively, such as ellipse fitting, crater detection, optical navigation landing on the planet, automated rendezvous and docking of spacecraft, 3D tracking of spacecraft, and so on.
| [1] |
XIANG Y, SCHMIDT T, NARAYANAN V, et al.PoseCNN: A convolutional neural network for 6D object pose estimation in cluttered scenes[EB/OL].(2017-11-01)[2019-04-01].
|
| [2] |
LIU C, HU W.Real-time geometric fitting and pose estimation for surface of revolution[J].Pattern Recognition, 2019, 85:90-108. doi: 10.1016/j.patcog.2018.08.002
|
| [3] |
CRIVELLARO A, RAD M, VERDIE Y, et al.Robust 3D object tracking from monocular images using stable parts[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(6):1465-1479. doi: 10.1109/TPAMI.2017.2708711
|
| [4] |
YU M, CUI H, TIAN Y.A new approach based on crater detection and matching for visual navigation in planetary landing[J].Advances in Space Research, 2014, 53(12):1810-1821. doi: 10.1016/j.asr.2013.04.011
|
| [5] |
ZHANG H, JIANG Z, ELGAMMAL A.Satellite recognition and pose estimation using homeomorphic manifold analysis[J].IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(1):785-792. doi: 10.1109/TAES.2014.130744
|
| [6] |
ESA.Pinpoint vision-based landings on moon, mars and asteroids[EB/OL].(2013-05-29)[2019-04-01].
|
| [7] |
GSA.TRON-Testbed for robotic optical navigation[EB/OL].(2017-03-29)[2019-04-01].
|
| [8] |
NGC.High-fidelity hardware-in-the-loop emulators[EB/OL].(2017-03-29)[2019-04-01].
|
| [9] |
PARKES S M, MARTIN I.Virtual lunar landscapes for testing vision-guided lunar landers[C]//IEEE International Conference on Information Visualization.Piscataway, NJ: IEEE Press, 1999: 122-127.
|
| [10] |
STAR-Dundee.PANGU-Planet and asteroid natural scene generation utility[EB/OL].(2017-02-08)[2019-04-01].
|
| [11] |
LU T, HU W, JIANG Z.An effective algorithm for generation of crater gray image[C]//IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications.Piscataway, NJ: IEEE Press, 2015: 1-6.
|
| [12] |
SU Q, ZHAO Y, WU F, et al.Simulation of high resolution lunar's Sinus Iridum terrain[C]//IEEE Conference on Industrial Electronics and Applications.Piscataway, NJ: IEEE Press, 2011: 2589-2592.
|
| [13] |
LI J S, LIU W M, LAN C Z, et al.Fast algorithm for lunar craters simulation[M].Berlin:Springer, 2011.
|
| [14] |
张玥, 李清毅, 许晓霞.月球表面地形数学建模方法[J].航天器环境工程, 2007, 24(6):341-343. doi: 10.3969/j.issn.1673-1379.2007.06.002
ZHANG Y, LI Q Y, XU X X.Mathematical modeling of lunar surface terrain[J].Spacecraft Environment Engineering, 2007, 24(6):341-343(in Chinese). doi: 10.3969/j.issn.1673-1379.2007.06.002
|
| [15] |
陈宝林.最优化理论与算法[M].2版.北京:清华大学出版社, 2005:10-23.
CHEN B L.Theory and algorithms of optimization[M].2rd ed.Beijing:Tsinghua University Press, 2005:10-23(in Chinese).
|
| [16] |
吴福朝.计算机视觉中的数学方法[M].北京:科学出版社, 2008:255-266.
WU F C.Mathematics in computer vision[M].Beijing:Science Press, 2008:255-266(in Chinese).
|
| [17] |
AKENINE-MOLLER T, HAINES E.实时计算机图形学[M].2版.普建涛, 译.北京: 北京大学出版社, 2004: 40-50.
AKENINE-MOLLER T, HAINES E.Real time graphics[M].2nd ed.PU J T, translated.Beijing: Peking University Press, 2004: 40-50(in Chinese).
|
| [18] |
NASA.Vesta[EB/OL].(2017-04-28)[2019-04-01].
|
| [19] |
NASA.Eros[EB/OL].(2017-04-28)[2019-04-01].
|
| [20] |
The Planetary Society.Mosaic of the asteroid Vesta from the Dawn spacecraft[EB/OL].(2017-04-28)[2019-04-01].
|
| [21] |
Wikipedia.433 Eros[EB/OL].(2017-04-28)[2019-04-01].
|
| [22] |
LU T, HU W, LIU C, et al.Effective ellipse detector with polygonal curve and likelihood ratio test[J].IET Computer Vision, 2015, 9(6):914-925. doi: 10.1049/iet-cvi.2014.0347
|
| [23] |
LU C, HU W.Effective method for ellipse extraction and integration for spacecraft images[J].Optical Engineering, 2013, 52(5):057002. doi: 10.1117/1.OE.52.5.057002
|
| [24] |
LU T, HU W, LIU C, et al.Relative pose estimation of a lander using crater detection and matching[J].Optical Engineering, 2016, 55(2):023102. doi: 10.1117/1.OE.55.2.023102
|
| [25] |
LIU C, HU W.Relative pose estimation for cylinder-shaped spacecrafts using single image[J].IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4):3036-3056. doi: 10.1109/TAES.2014.120757
|
| [26] |
COHEN J P, LO H Z, LU T, et al.Crater detection via convolutional neural networks[EB/OL].(2016-01-05)[2019-04-01].
|
| [27] |
DING W, STEPINSKI T F, MU Y, et al.Sub-kilometer crater discovery with boosting and transfer learning[J].ACM Transactions on Intelligent Systems and Technology, 2011, 2(4):39.
|
| [1] | CAI S Y,HAO F W,SHI T. Partition based on features of neighborhood points and corresponding point cloud registration of aero-engine damaged blade[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):784-794 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0081. |
| [2] | YANG J,ZHANG C. Semantic segmentation of point clouds by fusing dual attention mechanism and dynamic graph convolution[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(10):2984-2994 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0775. |
| [3] | MA Qing-lu, DING Xue-qin, HUANG Xiao-xiao, ZOU Zheng. 3D point cloud segmentation method of road scene based on adaptive graph convolution[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0686 |
| [4] | WANG Dequan, ZHAO Yuxuan, YUAN Xiangyue, WANG Qingchun, CHEN Zhongjia. Design and simulation of large composite material curing furnace based on flow field uniformity[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0370 |
| [5] | WANG F,YANG P Y,YANG D K. Theories and simulations of river boundary and level measurement using GNSS-I/MR[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1877-1887 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0529. |
| [6] | WANG Weijie, GUO Dinghun, LI Xiangyu, GENG Yixuan, QUAN Long. Typical Fault Mechanism Modeling and Simulation of Insulin Pump Sets[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0394 |
| [7] | WANG X Q,LAI F L,ZHAO C L. Reconfiguration control and motion simulation of tilt-rotor aircraft with multilinks[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1523-1531 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0522. |
| [8] | CHEN Xi, XIE Shuguo, WEI Mengyuan, LI Yuanyuan. Simulation modeling methodology for broadband conducted immunity quantization of analog and analog-digital hybrid chips[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0193 |
| [9] | LIU G X,ZHANG J T,DING D D. Lossy point cloud geometry compression based on Transformer[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):634-642 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0412. |
| [10] | DONG X L,HUANG J,QIN F,et al. Graph pooling method based on multilevel union[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):559-568 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0386. |
| [11] | YIN Jihao, WEI Xiaodong, CUI Linyan, WU Wenjun, ZHANG Xiaoming, LIU Chuankai. A survey of artificial intelligence technology for asteroid exploration[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0724 |
| [12] | GAO Y T,ZHANG J D. Intelligent orbit determination based on remote sensing image of ontology knowledge base[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1053-1062 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0417. |
| [13] | ZHANG D B,WANG L X,LI C. Simulation analysis of reduction effect of symmetrical winding method for multi-polar fiber ring on Shupe error[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(7):1715-1721 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0530. |
| [14] | JI Na, LIU Juan, WANG Haoran, GAO Rui, LU Yonglai, LI Fanzhu. Simulation analysis and experimental study on stiffness and fatigue life fluctuation of the rubber bearing for heavy trucks[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0263 |
| [15] | GAO T F,KONG L G,SU B,et al. Design and simulation of detector for outer heliosphere pickup ions[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):367-377 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0243. |
| [16] | HE J J,YUAN C Q,GONG S P,et al. Sliding mode control for formation flying near libration points using hybrid propulsion[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1222-1230 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0420. |
| [17] | SHI F Y,ZHENG X J,JIANG L H,et al. Point cloud registration algorithm for non-cooperative targets based on Hough transform[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):2071-2078 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0575. |
| [18] | LU T T,DENG Z J,GU X,et al. An ellipse detection algorithm for spacecraft optical navigation[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):853-868 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0363. |
| [19] | LI Wen, CAI Yongqing, CHEN Mengfan, LIU Peng. Optical path simulation and design of NO rapid detection optical cavity structure[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2146-2152. doi: 10.13700/j.bh.1001-5965.2021.0105 |
| [20] | YANG Chao, JIANG Yu, WU Zhigang. Numerical simulation of skipping motion of three-dimensional structure based on boundary element method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1678-1691. doi: 10.13700/j.bh.1001-5965.2022.0141 |
| 1. | 邓强,宣继涛. 散射环境下光学图像成像系统设计. 激光杂志. 2023(04): 190-195 .  | |
| 2. | 张丽伟,刘琼. 基于人工智能技术的紫外光通信调制方法. 激光杂志. 2023(05): 107-111 . | |
| 3. | 刘倩,陈辉,曾健友. 基于计算机视觉的可见光图像彩色成像研究. 激光杂志. 2023(07): 105-109 . | |
| 4. | 李云红,朱绵云,任劼,苏雪平,周小计,于惠康. 改进深度卷积生成式对抗网络的文本生成图像. 北京航空航天大学学报. 2023(08): 1875-1883 .  本站查看 本站查看 | |
| 5. | 张晓华,蔡巍,武宇平,杜维柱,薛文祥,卢毅. 基于海量点云数据的输电线路三维建模研究. 信息技术. 2023(09): 143-147 . | |
| 6. | 何煊强,崔文涛. 基于灰狼算法的室内三维空间图像分割方法研究. 遵义师范学院学报. 2023(05): 81-85+109 . | |
| 7. | 张雄,徐高鹏,熊健,李鑫,杨岩. 残余应力无损检测点定位及实现方法. 机械设计. 2022(01): 91-97 . | |
| 8. | 刘红雨,李力恒,王晓磊. 基于Canny-Harris特征点的图像目标尺度方向跟踪算法. 信息技术. 2022(07): 46-50+58 . | |
| 9. | 王艳贞,王晓芬,胡海晓. 基于空间光学技术的彩色图像增强方法. 激光杂志. 2022(07): 75-79 . | |
| 10. | 陆婷婷,张尧,阎岩,杨利民,杨卫东. 一种基于自动特征学习的陨石坑区域检测算法. 北京航空航天大学学报. 2021(05): 939-952 . 本站查看 | |
| 11. | 谭静仪,潘进,黄婷,骆挺,何震. 多变光照下的无人船图像模糊纹理光点定位识别. 舰船科学技术. 2021(12): 61-63 . | |
| 12. | 陈凯,张志刚. 基于光空间变换技术的虚拟动画三维场景设计. 激光杂志. 2021(11): 190-195 . |

Figures(20) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

WU Cun-hao, YANG Jia-ling, ZANG Shu-guang, et al. Study of Bird Impact Loading Model[J]. Journal of Beijing University of Aeronautics and Astronautics, 2001, 27(3): 332-335. (in Chinese)





 DownLoad:
DownLoad: