| Citation: | HE Lyulong, ZHANG Jiaqiang, HOU Yueqi, et al. Time-varying formation control for UAV swarm with directed interaction topology and communication delay[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 314-323. doi: 10.13700/j.bh.1001-5965.2019.0206(in Chinese)

|
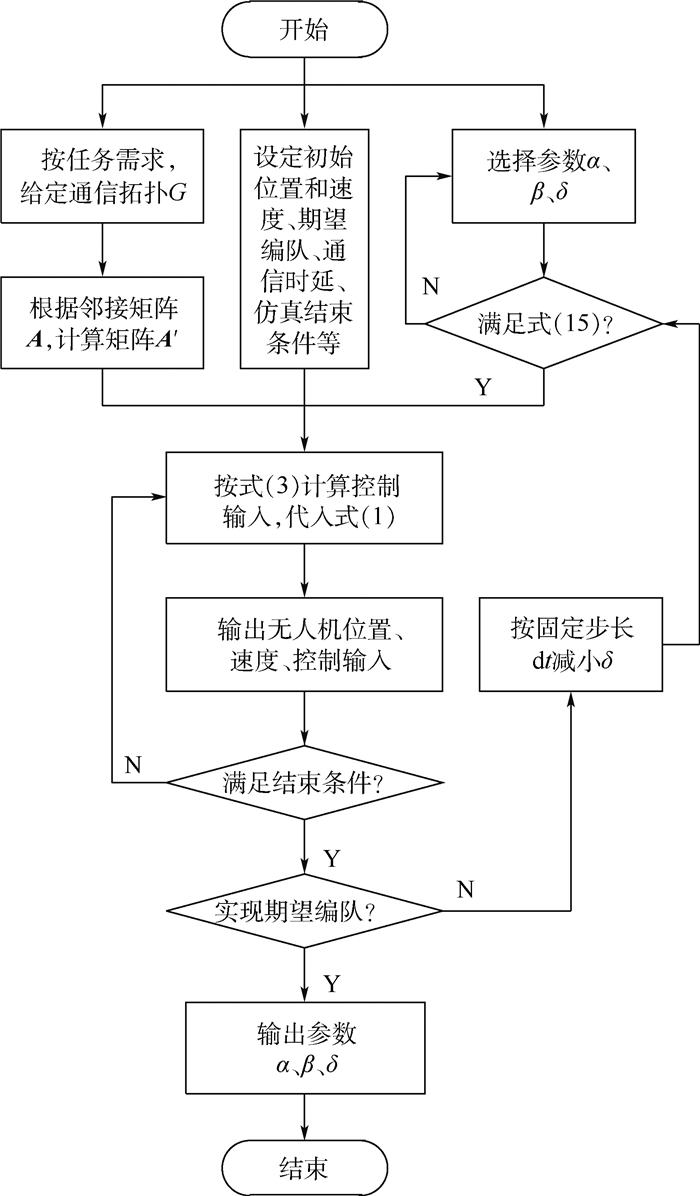
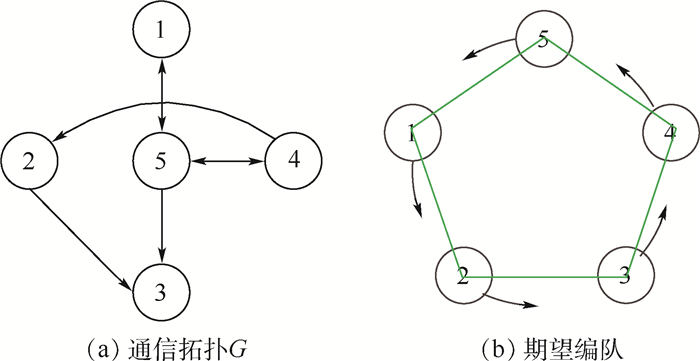
Time-varying formation control problems for unmanned aerial vehicles (UAV) swarm with directed interaction topology and communication delay are investigated. The UAV swarm is modeled as second-order discrete-time system on the formation control level and a distributed formation control protocol is designed by utilizing the instantaneous state information of UAV itself and the communication delayed state information of its neighbors. Through theoretical analysis, the necessary and sufficient conditions for UAV swarm to achieve time-varying formation are obtained, and an explicit description of the feasible time-varying formation set is given. Under the condition that the swarm communication topology has a spanning tree, the constraints of undetermined parameters and state update period in the control protocol are analyzed, and the flowchart of parameter design is given. Simulation results show that the designed control protocol can achieve time-varying formation control of UAV swarm even with relatively large communication delay, and thus the correctness and effectiveness of the theoretical analysis are verified.
| [1] |
梁晓龙, 孙强, 尹忠海, 等.大规模无人系统集群智能控制方法综述[J].计算机应用研究, 2015, 32(1):11-16. doi: 10.3969/j.issn.1001-3695.2015.01.003
LIANG X L, SUN Q, YIN Z H, et al.Review on large-scale unmanned system swarm intelligence control method[J].Application Research of Computers, 2015, 32(1):11-16(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.003
|
| [2] |
梁晓龙, 何吕龙, 张佳强, 等.航空集群构型控制及其演化方法研究[J].中国科学:技术科学, 2019, 49(3):277-287.
LIANG X L, HE L L, ZHANG J Q, et al.Configuration control and evolutionary mechanism of aircraft swarm[J].Science Sinica Technologica, 2019, 49(3):277-287(in Chinese).
|
| [3] |
HE L L, BAI P, LIANG X L, et al.Feedback formation control of UAV swarm with multiple implicit leaders[J].Aerospace Science and Technology, 2018, 72:327-334. doi: 10.1016/j.ast.2017.11.020
|
| [4] |
REN W.Consensus strategies for cooperative control of vehicle formations[J].IET Control Theory & Applications, 2007, 1(2):505-512. doi: 10.1049-iet-cta-20050401/
|
| [5] |
胡利平, 梁晓龙, 张佳强.基于Multi-Agent的航空集群系统重构机理研究[J].火力与指挥控制.2016, 41(11):80-84. doi: 10.3969/j.issn.1002-0640.2016.11.019
HU L P, LIANG X L, ZHANG J Q.Research on aircraft swarms system reconstruction mechanism based on Multi-Agent[J].Fire Control & Command Control, 2016, 41(11):80-84(in Chinese). doi: 10.3969/j.issn.1002-0640.2016.11.019
|
| [6] |
DONG X W, ZHOU Y, REN Z, et al.Time-varying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying[J].IEEE Transactions on Industrial Electronics, 2017, 64(6):5014-5024. doi: 10.1109/TIE.2016.2593656
|
| [7] |
段海滨, 李沛.基于生物群集行为的无人机集群控制[J].科技导报, 2017, 35(7):17-25.
DUAN H B, LI P.Autonomous control for unmanned aerial vehicle swarms based on biological collective behaviors[J].Science & Technology Review, 2017, 35(7):17-25(in Chinese).
|
| [8] |
周欢, 赵辉, 韩统, 等.基于规则的无人机集群飞行与规避协同控制[J].系统工程与电子技术, 2016, 38(6):1374-1382.
ZHOU H, ZHAO H, HAN T, et al.Cooperative flight and evasion control of UAV swarm based on rules[J].Systems Engineering and Electronics, 2016, 38(6):1374-1382(in Chinese).
|
| [9] |
TRON R, THOMAS J, LOIANNO G, et al.A distributed optimization framework for localization and formation control:Applications to vision-based measurements[J].IEEE Control Systems Magazine, 2016, 36(4):22-44. doi: 10.1109/MCS.2016.2558401
|
| [10] |
李炳乾, 董文瀚, 马小山.无人机编队保持反步容错控制[J].兵工学报, 2018, 39(11):2172-2184. doi: 10.3969/j.issn.1000-1093.2018.11.011
LI B Q, DONG W H, MA X S.Back-stepping-fault-tolerant control for keeping the formation of unmanned aerial vehicles[J].Acta Armamentarii, 2018, 39(11):2172-2184(in Chinese). doi: 10.3969/j.issn.1000-1093.2018.11.011
|
| [11] |
DONG Y, HU X M.Distributed control of periodic formations for multiple under-actuated autonomous vehicles[J].IET Control Theory & Applications, 2017, 11(1):66-72.
|
| [12] |
KHALILI M, ZHANG X D, CAO Y C, et al.Distributed adaptive fault-tolerant leader-following formation control of nonlinear uncertain second-order multi-agent systems[J].International Journal of Robust and Nonlinear Control, 2018, 28(15):4287-4308.
|
| [13] |
LI Z K, REN W, LIU X D, et al.Distributed containment control of multi-agent systems with general linear dynamics in the presence of multiple leaders[J].International Journal of Robust and Nonlinear Control, 2013, 23(5):534-547. doi: 10.1002/rnc.1847
|
| [14] |
SEO J, KIM Y, KIM S, et al.Consensus-based reconfigurable controller design for unmanned aerial vehicle formation flight[J].Proceedings of the Institution of Mechanical Engineers, 2012, 226(7):817-829. doi: 10.1177/0954410011415157
|
| [15] |
RAHIMI R, ABDOLLAHI F, NAQSHI K.Time-varying formation control of a collaborative heterogeneous multi agent system[J].Robotics and Autonomous Systems, 2014, 62(12):1799-1805. doi: 10.1016/j.robot.2014.07.005
|
| [16] |
ANTONELLI G, ARRICHIELLO F, CACCAVALE F, et al.Decentralized time-varying formation control for multi-robot systems[J].The International Journal of Robotics Research, 2014, 33(7):1029-1043. doi: 10.1177/0278364913519149
|
| [17] |
GE M F, GUAN Z H, YANG C, et al.Time-varying formation tracking of multiple manipulators via distributed finite-time control[J].Neurocomputing, 2016, 202:20-26. doi: 10.1016/j.neucom.2016.03.008
|
| [18] |
周绍磊, 祁亚辉, 张雷, 等.切换拓扑下无人机集群系统时变编队控制[J].航空学报, 2017, 38(4):320452.
ZHOU S L, QI Y H, ZHANG L, et al.Time-varying formation control of UAV swarm systems with switching topologies[J].Acta Aeronautica et Astronautica Sinica, 2017, 38(4):320452(in Chinese).
|
| [19] |
HOSSEINZADEH Y M, MAHBOOBI E R.Distributed predictive formation control of networked mobile robots subject to communication delay[J].Robotics and Autonomous Systems, 2017, 91:194-207. doi: 10.1016/j.robot.2017.01.005
|
| [20] |
HAN L, DONG X W, LI Q D, et al.Formation tracking control for time-delayed multi-agent systems with second-order dynamics[J].Chinese Journal of Aeronautics, 2017, 30(1):348-357. doi: 10.1016/j.cja.2016.10.019
|
| [21] |
XUE R B, SONG J M, CAI G H.Distributed formation flight control of multi-UAV system with nonuniform time-delays and jointly connected topologies[J].Proceedings of the Institution of Mechanical Engineers, 2016, 230(10):1871-1881. doi: 10.1177/0954410015619446
|
| [22] |
LI P, QIN K Y, PU H P.Distributed robust time-varying formation control for multiple unmanned aerial vehicles systems with time-delay[C]//Proceedings of 2017 29th Chinese Control and Decision Conference.Piscataway, NJ: IEEE Press, 2017: 1539-1544.
|
| [23] |
朱创创, 梁晓龙, 张佳强, 等.无人机集群编队控制演示验证系统[J].北京航空航天大学学报, 2018, 44(8):1739-1747. doi: 10.13700/j.bh.1001-5965.2017.0600
ZHU C C, LIANG X L, ZHANG J Q, et al.Demonstration and verification system for UAV swarm formation control[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8):1739-1747(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0600
|
| [24] |
LI S B, ZHANG J, LI X L, et al.Formation control of heterogeneous discrete-time nonlinear multi-agent systems with uncertainties[J].IEEE Transactions on Industrial Electronics, 2017, 64(6):4730-4740. doi: 10.1109/TIE.2017.2674590
|
| [25] |
ZHANG W L, LIU J C, WANG H H.Ultra-fast formation control of high-order discrete-time multi-agent systems based on multi-step predictive mechanism[J].ISA Transactions, 2015, 58:165-172. doi: 10.1016/j.isatra.2015.05.008
|
| [26] |
NAKAI M E, INOUE R S, TERRA M H, et al.Robust discrete-time markovian control for wheeled mobile robot formation:A fault tolerant approach[J].Journal of Intelligent & Robotic Systems, 2018, 91(2):233-247.
|
| [27] |
XU J, ZHANG G L, ZENG J, et al.Consensus based second order discrete-time multi-agent systems formation control with time-delays[C]//Proceedings of IEEE International Conference on Information and Automation.Piscataway, NJ: IEEE Press, 2015: 2626-2631.
|
| [28] |
XU G, HUANG C, ZHAI G.A necessary and sufficient condition for designing formation of discrete-time multi-agent systems with delay[J].Neurocomputing, 2018, 315:48-58. doi: 10.1016/j.neucom.2018.06.007
|
| [29] |
REN W, BEARD R W.Consensus seeking in multiagent systems under dynamically changing interaction topologies[J].IEEE Transactions on Automatic Control, 2005, 50(5):655-661. doi: 10.1109/TAC.2005.846556
|
| [1] | WANG L Y,HE H F,HE Y M,et al. Three-dimensional polarization filtering method of generalized oblique projection based on SVT[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):633-643 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0019. |
| [2] | CUI Y P,LI Z H,ZHENG G L. Computing convex hull of a generic polygon with simulation of progressive support for an elastic line[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):216-223 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0246. |
| [3] | DENG J X,CHEN L,LU S T,et al. Damage distribution of composite structures of a certain type aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):920-930 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0379. |
| [4] | QIN Yue-mei, ZHANG Rong-hua, YANG Yan-bo, PAN Quan. Multiple model minimum upper bound filter under generalized unknown disturbances[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0723 |
| [5] | LI Liang, CHENG Li, LI Ruijie, SHI Xiuyun, WEI Yilin. Fault exclusion method based on maximum a posteriori probability for multi-constellation ARAIM[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0414 |
| [6] | SONG Yuan, HUANG Zhi-gang, LI Rui, WANG Yue-chen, SHEN Jun, WANG Yong-chao, NIE Xin. An RTK integrity evaluation method based on risk probability decomposition[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024-0134 |
| [7] | QI Hao, FU Yue-xin, HU Zhu-hua, WU Jia-qi, ZHAO Yao-chi. A lightweight semantic VSLAM approach based on adaptive thresholding and speed optimization[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0552 |
| [8] | WEN C,DONG W H,XIE W J,et al. Multi-UAVs 3D cooperative curve path planning method based on CEA-GA[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3086-3099 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0787. |
| [9] | ZHOU Quan-zhi, YANG You-xu, SUN Lu-bin, ZHANG Xing-cui, WU Yi-fei, HUO Meng-wen. Aeroelastic Optimization Design of SpaRibs Wing Structure[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0343 |
| [10] | WANG Z X,WAN Z Q,WANG X Z,et al. Fast stability analysis method for composite panel with variable angle tow fiber[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):353-366 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0259. |
| [11] | XIN T D,CUI C Y,LIU Y,et al. Non-probabilistic reliability analysis method for propellent tank with crack defect[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2330-2336 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0651. |
| [12] | MIAO D,YANG D K,XU Z C,et al. Low-altitude, slow speed and small target detection probability of passive radar based on GNSS signals[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):657-664 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0271. |
| [13] | LI J,ZHANG R C,PAN C Y,et al. Micro immune optimization algorithm for single objective probabilistic constrained programming[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):525-537 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0288. |
| [14] | ZHU Qi-tao, LI Hong-shuang. A mixed reliability analysis method based on direct probability integral[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0498 |
| [15] | ZHUANG Z B,WANG W H,TAI H D,et al. Influence of contrast threshold effect on runway visual range measurement[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):2906-2912 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0040. |
| [16] | MENG Wei-jun, AN Wen, MA Su-gang, YANG Xiao-bao. An Object Detection Algorithm Based on Feature Enhancement and Adaptive Threshold Non-maximum Suppression[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0534 |
| [17] | XIA Y X,FANG Z G. Degradation-shock competing failure modeling considering randomness of failure threshold[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):2079-2088 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0576. |
| [18] | WANG Zhichao, TENENHAUS Arthur, WANG Huiwen, ZHAO Qing. Functional regularized generalized canonical correlation analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1960-1969. doi: 10.13700/j.bh.1001-5965.2021.0064 |
| [19] | QI Jiayi, LI Qiao, XIONG Huagang, YAN Ruowen. Airborne PLC channel modeling by transfer function and its probabilistic guarantee analysis[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(12): 2548-2555. doi: 10.13700/j.bh.1001-5965.2021.0153 |
| [20] | DONG Leiting, HE Shuangxin. SGBEM-FEM coupling for thermoelastic fracture mechanics analysis of rotational components[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1702-1709. doi: 10.13700/j.bh.1001-5965.2022.0140 |


Figures(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

LI Nan, Lü Jun-fang, LI Yu-tao, et al. Simulation about the Conditioning Circuit of Sensor[J]. Journal of Beijing University of Aeronautics and Astronautics, 2001, 27(3): 280-283. (in Chinese)





 DownLoad:
DownLoad: