| Citation: | DONG Wenhan, TONG Yingyi, ZHU Peng, et al. Multiple-fault fault-tolerant control of transport aircraft based on extended state observer[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(5): 1005-1017. doi: 10.13700/j.bh.1001-5965.2019.0346(in Chinese)

|
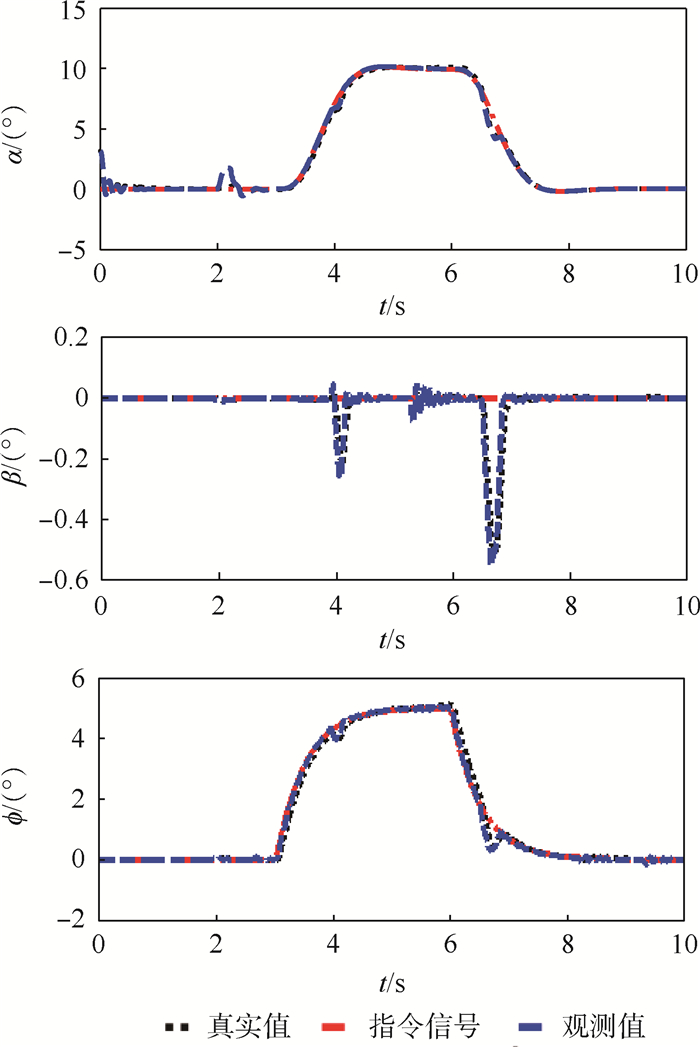
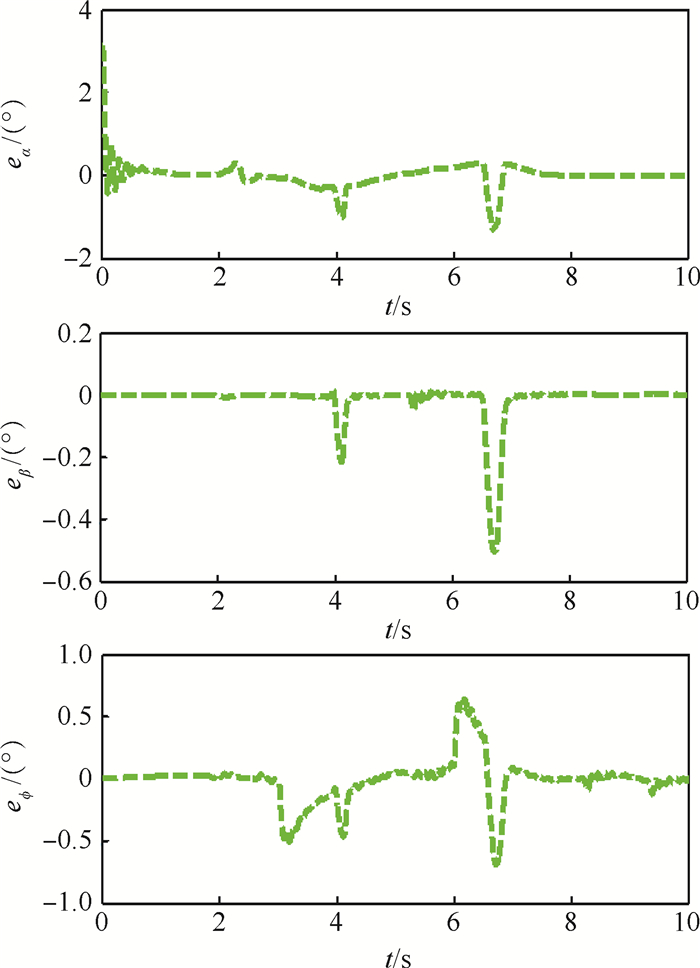
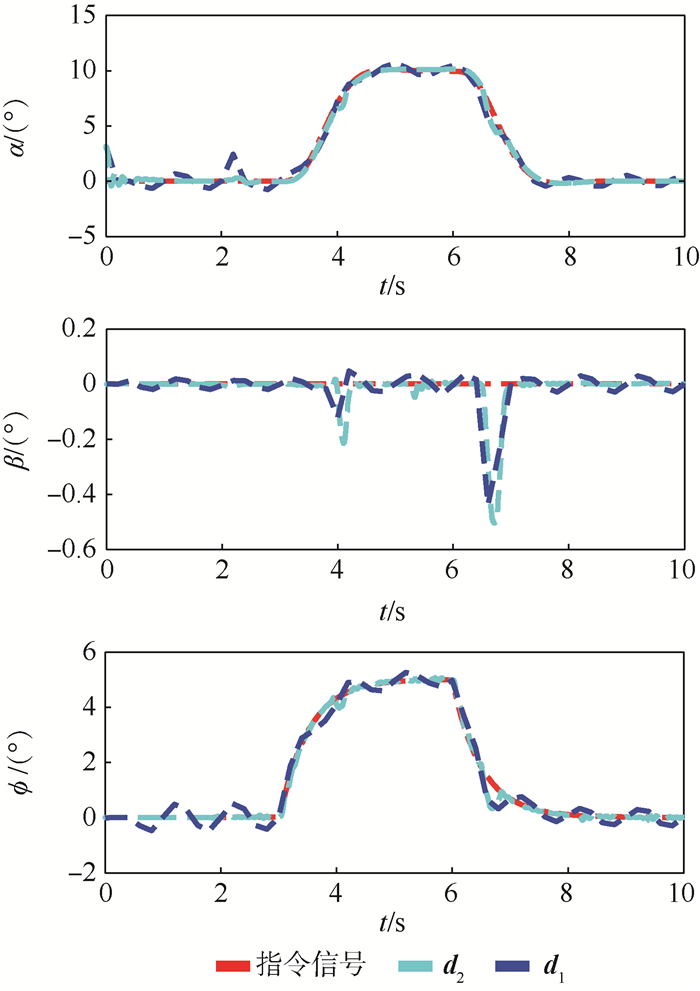
To solve the attitude tracking problem of transport aircraft with sensor faults and actuator faults, a backstepping fault-tolerant control method based on extended state observer is proposed. The state observer and controller are designed separately. The extended state observer with neural network is designed to estimate the flight states, sensor faults and actuator faults simultaneously. On this basis, the flight states are replaced by the estimates, the control law of attitude tracking control is designed based on backstepping control technique, and the command filter is also introduced into the fault-tolerant controller which can improve the control performance.The final bounded convergence of closed-loop system tracking errors is derived and proved using Lyapunov stability analysis. The simulation results show that the proposed method is effective and can solve the attitude angle tracking problem of transport aircraft in the presence of sensor faults and actuator faults.
| [1] |
董琦, 宗群, 张超凡, 等.强干扰影响下基于干扰补偿的大飞机智能自适应控制[J].中国科学:技术科学, 2018, 48(3):248-263. http://www.cnki.com.cn/Article/CJFDTotal-JEXK201803002.htm
DONG Q, ZONG Q, ZHANG C F, et al.Intelligent adaptive control for the large aircraft based on the disturbance compensation under the influence of strong interferences[J].Scientia Sinica Technologica, 2018, 48(3):248-263(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-JEXK201803002.htm
|
| [2] |
TANG X, TAO G, JOSHI S M. Adaptive actuator failure compensation for nonlinear MIMO systems with an aircraft control application[J].Automatica, 2007, 43(11):1869-1883.
|
| [3] |
ALWI H, EDWARDS C. Fault tolerant control using sliding modes with on-line control allocation[J].Automatica, 2008, 44(7):1859-1866.
|
| [4] |
陈勇, 董新民, 薛建平, 等.过驱动执行器故障自适应重构控制分配策略[J].应用科学学报, 2011, 29(5):537-544.
CHEN Y, DONG X M, XUE J P, et al.Adaptive reconfigurable control allocation for over-actuated actuator failures[J].Journal of Applied Sciences, 2011, 29(5):537-544(in Chinese).
|
| [5] |
黄宇海, 齐瑞云, 姜斌, 等.基于动态面backstepping控制的高超声速飞行器自适应故障补偿设计[J].中国科学技术大学学报, 2012, 42(9):768-774.
HUANG Y H, QI R Y, JIANG B, et al.Adaptive failure compensation design for hypersonic vehicles based on dynamic surface backstepping control[J].Journal of University of Science and Technology of China, 2012, 42(9):768-774(in Chinese).
|
| [6] |
马骏, 倪世宏, 解武杰, 等.存在匹配/非匹配不确定性的飞机舵面故障L1容错控制[J].控制与决策, 2017, 32(6):967-975.
MA J, NI S H, XIE W J, et al.L1 fault tolerant control for aircraft actuator fault with matched and unmatched uncertainties[J].Control and Decision, 2017, 32(6):967-975(in Chinese).
|
| [7] |
张绍杰, 双维芳, 李正强.飞翼飞行器的操纵面故障自适应补偿控制[J].控制理论与应用, 2018, 35(8):160-167.
ZHANG S J, SHUANG W F, LI Z Q.Nonlinear adaptive failure compensation control for flying wing aircraft[J].Control and Decision, 2018, 35(8):160-167(in Chinese).
|
| [8] |
ESPINOZA- TREJO D R, CAMPOS-DELGADO D U.Active fault tolerant scheme for variable speed drives under actuator and sensor faults[C]//IEEE International Conference on Control Applications.Piscataway: IEEE Press, 2008: 10235214.
|
| [9] |
LI H, GAO H, SHI P, et al.Fault-tolerant control of Markovian jump stochastic systems via the augmented sliding mode observer approach[J].Automatica, 2014, 50(7):1825-1834.
|
| [10] |
杜艳丽, 李元春.考虑多故障同发的可重构机械臂分散主动容错控制[J].中南大学学报(自然科学版), 2014, 45(3):727-733.
DU Y L, LI Y C.Decentralized active fault-tolerant control for reconfigurable manipulator with simultaneous faults[J].Journal of Central South University(Science and Technology), 2014, 45(3):727-733(in Chinese).
|
| [11] |
MA Z Y, MA H J.Adaptive finite-time dynamic output-feedback FTC design for MIMO nonlinear systems with actuator and sensor faults[J].IEEE Access, 2018, 6:44824-44834.
|
| [12] |
EDWARDS C, LOMBAERTS T, SMAILI H.Fault tolerant flight control:A benchmark challenge[M].Berlin:Springer, 2010.
|
| [13] |
葛铁.多故障的直接自修复控制[D].南京: 南京航空航天大学, 2002.
GE T.The direct self-repairing flight control for multiple faults[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2002(in Chinese).
|
| [14] |
王永.飞机的直接自修复控制[D].南京: 南京航空航天大学, 1999.
WANG Y.The direct self-repairing flight control of aircraft[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 1999(in Chinese).
|
| [15] |
陈伟, 卢京潮, 袁燎原, 等.基于高增益观测器的航迹角自适应反步控制[J].北京航空航天大学学报, 2013, 39(10):1414-1420. https://bhxb.buaa.edu.cn/CN/Y2013/V39/I10/1414
CEHN W, LU J C, YUAN L Y, et al.Adaptive backstepping control for flight path angle based on high gain observer[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(10):1414-1420(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2013/V39/I10/1414
|
| [16] |
章胜, 汪清, 何开锋, 等.改进动态面控制方法及其在过失速机动中的应用[J].空气动力学学报, 2017, 35(5):718-726.
ZHANG S, WANG Q, HE K F, et al.An improved dynamic surface control law and its application in post-stall maneuvers[J].Acta Aerodynamica Sinica, 2017, 35(5):718-726(in Chinese).
|
| [17] |
孙化东, 于剑桥, 梅跃松.卷弧翼滚转导弹Lipschitz自适应轨迹线性化控制[J].系统工程与电子技术, 2017, 39(1):162-167.
SUN H D, YU J Q, MEI Y S.Control of wrap-around fin rolling missiles based on Lipschitz adaptive trajectory linearization[J].Systems Engineering and Electronics, 2017, 39(1):162-167(in Chinese).
|
| [18] |
CHEN Y, DONG X, LIU Z, et al.Adaptive neural control for a class of time-delay systems in the presence of backlash or dead-zone non-linearity[J].IET Control Theory & Applications, 2014, 8(11):1009-1022.
|
| [19] |
YANG M C, JIANG J.Reconfigurable control based on neural network for multi-effectors aircraft[C]//IEEE Information Technology, Networking, Electronic & Automation Control Conference.Piscataway: IEEE Press, 2016: 16284433.
|
| [20] |
KANG Q, WANG W, LIU Y.Adaptive robust fuzzy control for a class of uncertain nonlinear systems in pure-feedback form[J].Automatica, 2002, 38(8):1365-1372.
|
| [21] |
SONNEVELDT L, CHU Q P, MULDER J A.Nonlinear flight control design using constrained adaptive backstepping[J].Journal of Guidance, Control, and Dynamics, 2007, 30(2):322-336.
|
| [22] |
YU J, SHI P, DONG W, et al.Observer and command filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems[J].IEEE Transactions on Industrial Electronics, 2015, 62(9):5962-5970.
|
| [1] | WANG H,LI X K,ZHANG H L,et al. Multi-UAV stereoscopic inclusion control based on dynamic scale observer[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):655-667 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0026. |
| [2] | BAI J B,CHEN Y,XIE S Y,et al. Design method for modulation strategy of a single-inductor multi-port converter based on reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(5):1480-1489 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0302. |
| [3] | ZHEN Chong, FENG Xinyu. Carrier-based aircraft direct lift control based on sliding mode observer and non-linear dynamic inversion technology[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0373 |
| [4] | YI Shaopeng, DONG Wei, WANG Weilin, WANG Chunyan, YI Aiqing, WANG Jianan. Neural Network Controller-Based Safe Landing Algorithm for UAVs[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0402 |
| [5] | MA Z W,BAI H,CHEN H B,et al. RBF neural network robust adaptive control of quadrotor aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1620-1628 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0595. |
| [6] | ZHAI You-hong, LI Chun-tao, SU Zi-kang, LI Xue-bing. Neural network incremental dynamic inversion target drone somersault maneuver control[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0690 |
| [7] | GE Wenqing, LI Detong, SONG Yadong, TAN Cao, LI Bo. Displacement sensorlesscontrol of electromagnetic linear actuator based on improved sliding mode observer[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0291 |
| [8] | YANG X X,JIANG Z J,ZHANG Y,et al. Distributed cooperative guidance strategy based on virtual negotiation and rolling horizon optimization[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):61-76 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0174. |
| [9] | FAN Zhi-wen, SONG Xiao-juan, LU: Shu-feng, YUE Bao-zeng. Fixed-time sliding mode fault-tolerant control for liquid-filled spacecraft[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0736 |
| [10] | XIE M J,DUAN J Q,MA W R,et al. Sliding mode control for electric braking systems of aircraft based on prescribed performance[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):260-267 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0229. |
| [11] | SHI T X,CHEN L S,LI T S,et al. Distributed adaptive anti-disturbance control for power systems based on multi-agents[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1685-1692 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0496. |
| [12] | LIU X,WANG Z Y,WANG X Y. Model-free predictive current control for permanent magnet toroidal motor with extended state observer[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(4):1085-1096 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0495. |
| [13] | ZHOU Y J,WAN Q,XU Y Z,et al. Redundancy design of a FADS system on a complex leading-edge vehicle using neural network approach[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):757-764 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0341. |
| [14] | JIN L,YANG S L. Fault-tolerant control of spacecraft attitude with prescribed performance based on reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2404-2412 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0666. |
| [15] | YAN Kun, ZHAO Jin-ze, CHEN Chao-bo, GAO Song, CAO Kai. Neural network-based fault tolerant control for unmanned helicopter with multiple actuator faults[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0699 |
| [16] | FU H Q,WU S F,LIU M L,et al. Disturbance-observer based adaptive control for space inertial sensor[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2799-2806 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0734. |
| [17] | XIA L C,WANG S Y,ZHANG J,et al. Bi-bandwidth extended state observer based disturbance rejection control method and its application on UAV[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1201-1208 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0411. |
| [18] | ZHAO J Y,HU J,YAO J Y,et al. EHA fault diagnosis and fault tolerant control based on adaptive neural network robust observer[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1209-1221 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0416. |
| [19] | SHU Hong-bin, YU Chuan-qiang, LIU Zhi-hao, TANG Sheng-jin, CHEN Jian-wei. State estimation of multi-axle special vehicles by fusion of neural network and unscented Kalman filter[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2022.0535 |
| [20] | ZHANG Yuan, HUANG Wanwei, LU Kunfeng, BAI Wenyan, YU Jianglong. Modeling and finite-time control for hypersonic morphing flight vehicle[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1979-1993. doi: 10.13700/j.bh.1001-5965.2021.0701 |
| 1. | 崔铁军,李莎莎. 事件故障状态量子博弈过程的参与者收益研究. 运筹与管理. 2023(01): 116-120 .  | |
| 2. | 马立群,孙晓哲,杨士斌,杨建忠. 民用飞机飞控系统传感器故障诊断研究综述. 电光与控制. 2022(01): 56-60 . | |
| 3. | 方锦钰,袁红伟,安学广. 基于扩张状态观测器的卫星通信跟踪控制系统设计. 计算机测量与控制. 2022(05): 92-96 . | |
| 4. | 周丹,陈诚,杜一鸣. 基于传感器偏置故障的无人机容错控制设计. 科学技术创新. 2022(25): 135-140 . | |
| 5. | 夏金. 基于干扰观测器的无人机在轨姿态控制系统设计. 机械与电子. 2021(10): 63-67 . | |
| 6. | 傅琪,景云,王丹,刘陆,王浩亮. 永磁同步电机的事件触发位置跟踪控制. 电力系统及其自动化学报. 2021(11): 1-7 . |

Figures(7) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Gao Dali, Zhan Maosheng. Fabrication and electricity properties of metal covered acrylate rubber microspheres by electroless plating[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(8): 911-915. (in Chinese)






 DownLoad:
DownLoad: