| Citation: | XU Fengqiang, DONG Peng, WANG Huibing, et al. Intelligent detection and autonomous capture system of seafood based on underwater robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(12): 2393-2402. doi: 10.13700/j.bh.1001-5965.2019.0377(in Chinese)

|
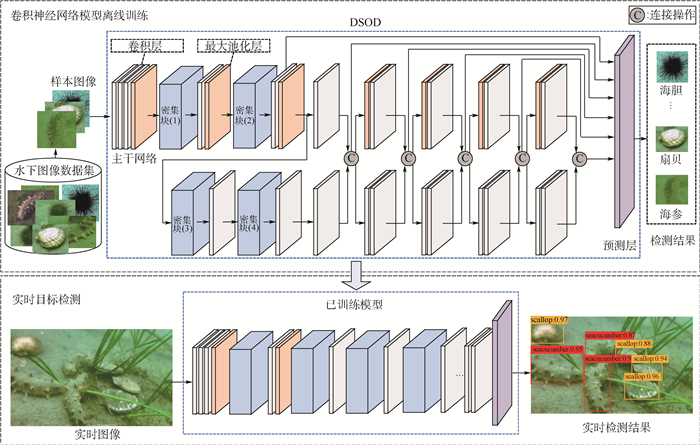
Currently, underwater robot faces the tough challenges of lacking intelligent detection and autonomous capture system to guide. Therefore, autonomous capture is hard to be achieved. Toward this end, this paper proposes an intelligent detection and autonomous capture system to achieve intelligent detection of marine target and guide the underwater robot to autonomously capture seafood. First, we employ convolutional neural network to perform object detection task in underwater scene and train the DSOD with underwater dataset to accurately detect marine objects. What's more, the short baseline positioning system is built to locate the underwater robot. To calculate the position of the object relative to robot, this paper proposes a coordinate transforming method to transform the target's location from camera coordinates system to underwater positioning coordinates. Furthermore, this paper designs a multi-signal analysis method based on feedback mechanism to command the robot to move ahead to the seafood until grasping them. To verify the effectiveness of the system, we develop an underwater picking robot and successfully apply the proposed methods to the robot to autonomously detect and capture the marine object.

| [1] |
SHEN Z, LIU Z, LI J, et al.DSOD: Learning deeply supervised object detectors from scratch[C]//IEEE International Conference on Computer Vision(ICCV).Piscataway, NJ: IEEE Press, 2017: 1937-1945.
|
| [2] |
VICKERY K.Acoustic positioning systems.A practical overview of current systems[C]//Proceedings of the 1998 Workshop on Autonomous Underwater Vehicles.Piscataway, NJ: IEEE Press, 1998: 5-17. https://ieeexplore.ieee.org/document/744434
|
| [3] |
GIRSHICK R, DONAHUE J, DARRELL T, et al.Rich feature hierarchies for accurate object detection and semantic segmentation[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2014: 580-587.
|
| [4] |
GIRSHICK R.Fast R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2015: 1440-1448.
|
| [5] |
REN S, HE K, GIRSHICK R, et al.Faster R-CNN: Towards real-time object detection with region proposal networks[C]//Proceedings of the 29th International Conference on Neural Information Processing Systems.Cambridge: MIT Press, 2015: 91-99. https://www.ncbi.nlm.nih.gov/pubmed/27295650
|
| [6] |
HE K, GKIOXARI G, DOLLÁR P, et al.Mask R-CNN[C]//Proceedings of the IEEE International Conference on Computer Vision.Piscataway, NJ: IEEE Press, 2017: 2961-2969.
|
| [7] |
DAI J, LI Y, HE K, et al.R-FCN: Object detection via region-based fully convolutional networks[C]//Proceedings of the 30th International Conference on Neural Information Processing Systems.Cambridge: MIT Press, 2016: 379-387.
|
| [8] |
REDMON J, DIVVALA S, GIRSHICK R, et al.You only look once: Unified, realtime object detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Piscataway, NJ: IEEE Press, 2016: 779-788. https://arxiv.org/abs/1506.02640
|
| [9] |
LIU W, ANGUELOV D, ERHAN D, et al.SSD: Single shot multibox detector[C]//European Conference on Computer Vision.Berlin: Springer, 2016: 21-37. doi: 10.1007/978-3-319-46448-0_2
|
| [10] |
FU C Y, LIU W, RANGA A, et al.DSSD: Deconvolutional single shot detector[EB/OL].(2017-01-23)[2019-07-01].https://arxiv.org/abs/1701.06659.
|
| [11] |
SUN X, SHI J, LIU L, et al.Transferring deep knowledge for object recognition in low-quality underwater videos[J].Neurocomputing, 2018, 275:897-908. doi: 10.1016/j.neucom.2017.09.044
|
| [12] |
杨放琼, 谭青, 彭高明.基于长基线系统深海采矿ROV精确定位[J].海洋工程, 2006(3):95-99. doi: 10.3969/j.issn.1005-9865.2006.03.016
YANG F Q, TAN Q, PENG G M.Accurate positioning for ROV in deep-sea mining based on LBL acoustic system[J].The Ocean Engineering, 2006(3):95-99(in Chinese). doi: 10.3969/j.issn.1005-9865.2006.03.016
|
| [13] |
SMITH S M, KRONEN D.Experimental results of an inexpensive short baseline acoustic positioning system for AUV navigation[C]//Proceedings of IEEE Oceans'97.Piscataway, NJ: IEEE Press, 1997, 1: 714-720. https://ieeexplore.ieee.org/document/634454
|
| [14] |
MANDIĆ F, RENDULIC I, MISKOVIC N, et al.Underwater object tracking using sonar and USBL measurements[J].Journal of Sensors, 2016, 2016:1-10. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=282033666c7fafaeebac32c6a695f993
|
| [15] |
MARANI G, CHOI S K, YUH J.Experimental study on autonomous manipulation for underwater intervention vehicles[C]//The Seventeenth International Offshore and Polar Engineering Conference, 2007: 1088-1094.
|
| [16] |
ZANNATHA J M I, LIMON R C, SANCHEZ A D G, et al.Monocular visual self-localization for humanoid soccer robots[C]//21st International Conference on Electrical Communications and Computers.Piscataway, NJ: IEEE Press, 2011: 100-107. https://ieeexplore.ieee.org/document/5749378
|
| [17] |
LEE P M, JEON B H, HONG S W, et al.System design of an ROV with manipulators and adaptive control of it[C]//Proceedings of the 2000 International Symposium on Underwater Technology.Piscataway, NJ: IEEE Press, 2000: 431-436. https://ieeexplore.ieee.org/document/852583
|
| [18] |
ZHANG M, ZHANG L, LI Y.A three-dimensional locating method for underwater robot based on sensors fusion[C]//2009 International Conference on Mechatronics and Automation.Piscataway, NJ: IEEE Press, 2009: 1207-1212. https://ieeexplore.ieee.org/document/5246507
|
| [19] |
REDMON J, FARHADI A.YoLov3: An incremental improvement[EB/OL].(2018-04-08)[2019-07-02].https://arxiv.org/abs/1804.02767.
|
Figures(11) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: