| Citation: | YOU Hanghang, HAN Qisong, YU Minjian, et al. Target tracking algorithm based on AIGWO-IMMUKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1826-1833. doi: 10.13700/j.bh.1001-5965.2019.0405(in Chinese)

|
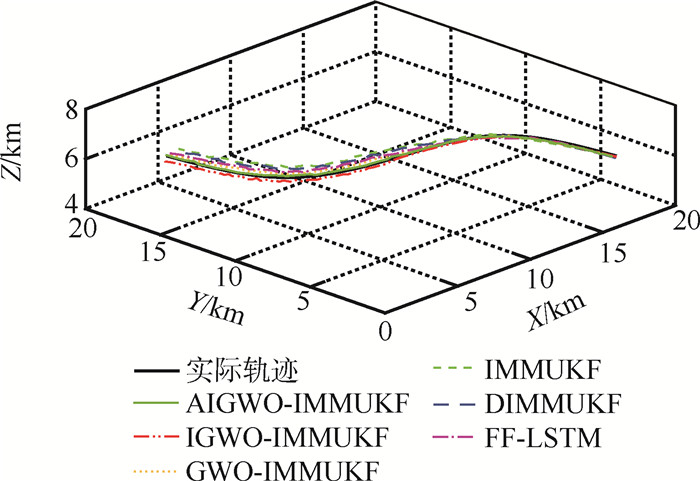
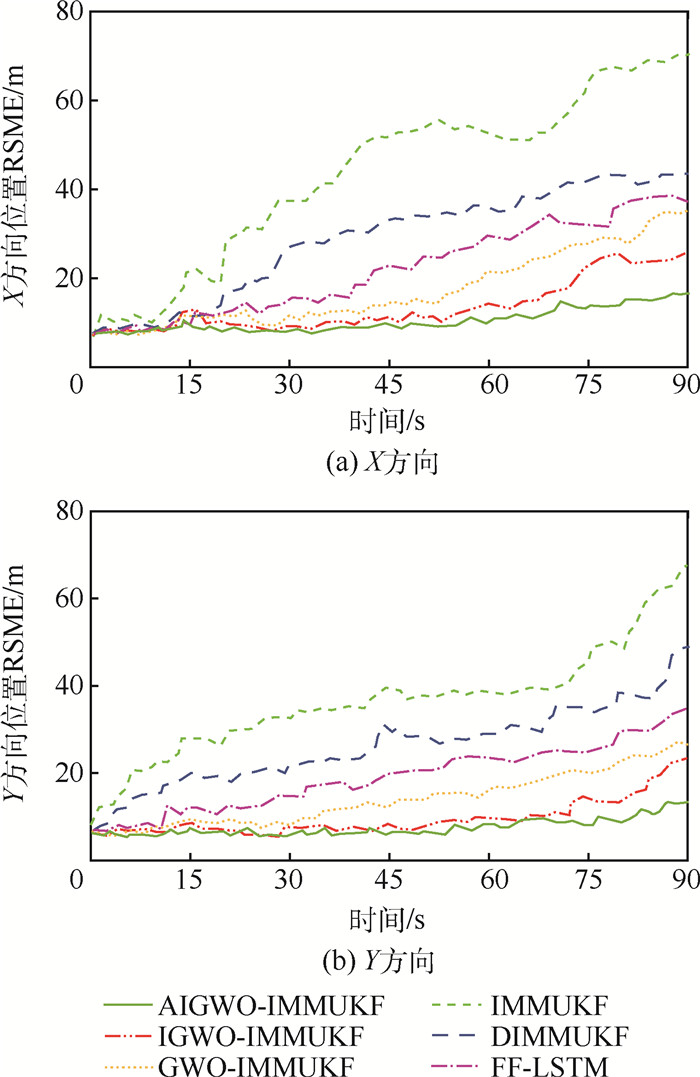
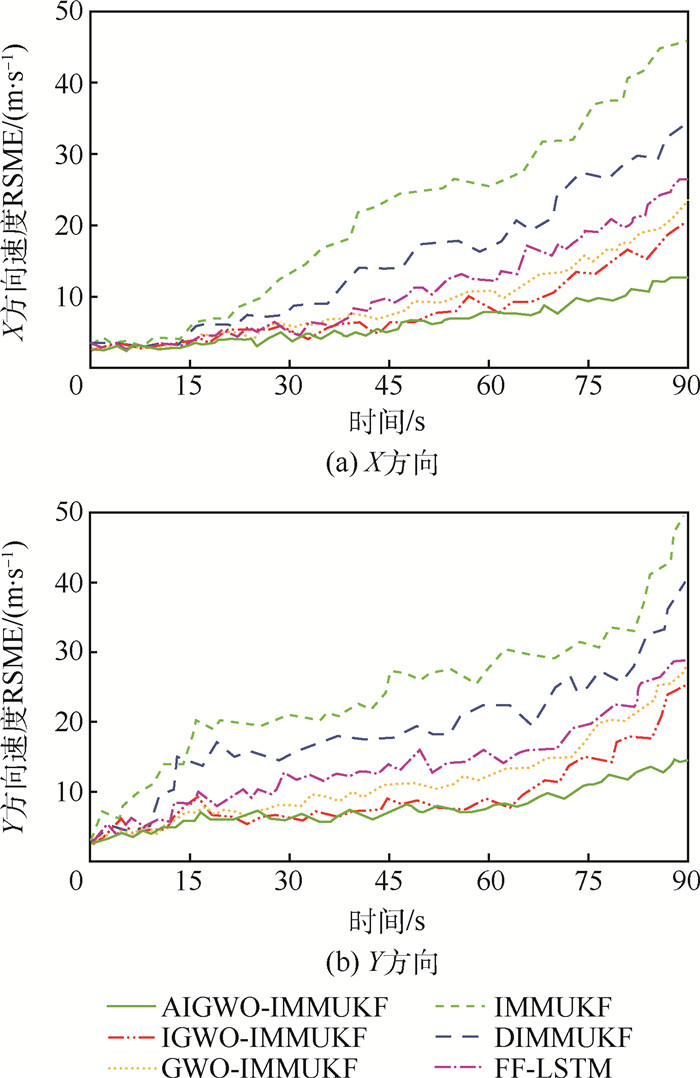
Aimed at the problem of filter selection and model design in target tracking algorithm, an adaptive Interacting Multiple Model-Unscented Kalman Filter (IMMUKF) target tracking algorithm is proposed. First, the algorithm steps of IMMUKF are introduced. Second, the Improved Grey Wolf Optimizer (IGWO) is proposed to optimize the filter parameters, and the time-varying Markov state transition probability is established by constructing the adjustment factor. Then, the AIGWO-IMMUKF algorithm is formed and its algorithm flowchart is given. Finally, the AIGWO-IMMUKF algorithm proposed in this paper and the traditional method are simulated under the same conditions, and the root mean square error curves of position and velocity as well as the timeliness comparison chart are obtained. The results show that AIGWO-IMMUKF algorithm overcomes the shortcomings of traditional IMMUKF, improves the performance of the algorithm, and has better accuracy and timeliness.

| [1] |
刘楠.基于机动目标跟踪模型的自适应滤波算法[D].杭州: 浙江理工大学, 2016.
LIU N.Adaptive filter algorithm based on maneuvering target tracking model[D].Hangzhou: Zhejiang Sci-Tech University, 2016(in Chinese).
|
| [2] |
江宝安, 万群.基于UKF-IMM的双红外机动目标跟踪算法[J].系统工程与电子技术, 2008, 30(8):1454-1459. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs200808016
JIANG B A, WAN Q.Maneuvering target passive tracking with dual infrared observers using IMM algorithm based on UKF[J].Systems Engineering and Electronics, 2008, 30(8):1454-1459(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs200808016
|
| [3] |
刘昌云.雷达机动目标运动模型与跟踪算法研究[D].西安: 西安电子科技大学, 2014.
LIU C Y.Study on motion model and tracking algorithms of radar maneuvering target[D].Xi'an: Xidian University, 2014(in Chinese).
|
| [4] |
万琴, 王耀南.基于卡尔曼滤波器的运动目标检测与跟踪[J].湖南大学学报(自然科学版), 2007, 34(3):36-40. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hndxxb200703009
WAN Q, WANG Y N.Moving objects detecting and tracking based on Kalman filter[J].Journal of Hunan University(Natural Sciences), 2007, 34(3):36-40(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hndxxb200703009
|
| [5] |
张勇刚, 黄玉龙, 武哲民, 等.一种高阶无迹卡尔曼滤波方法[J].自动化学报, 2014, 40(5):838-848. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201405006
ZHANG Y G, HUANG Y L, WU Z M, et al.A high order unscented Kalman filtering method[J].Acta Automatica Sinica, 2014, 40(5):838-848(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201405006
|
| [6] |
刘向阳.几种典型非线性滤波算法及性能分析[J].舰船电子工程, 2019, 39(7):32-36. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jcdzgc201907009
LIU X Y.Several typical nonlinear filtering algorithms and performance analysis[J].Ship Electronic Engineering, 2019, 39(7):32-36(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jcdzgc201907009
|
| [7] |
刘铮.UKF算法及其改进算法的研究[D].长沙: 中南大学, 2009.
LIU Z.Research on UKF algorithm and its improved algorithm[D].Changsha: Central South University, 2009(in Chinese).
|
| [8] |
张园.空中单机动目标跟踪算法的研究[D].大连: 大连海事大学, 2014.
ZHANG Y.The research on tracking algorithms for single aerial maneuvering target[D].Dalian: Dalian Maritime University, 2014(in Chinese).
|
| [9] |
MALLESWARAN M, VAIDEHI V, IRWIN S, et al.IMM-UKF-TFS model-based approach for intelligent navigation[J].The Journal of Navigation, 2013, 66(6):19. http://journals.cambridge.org/abstract_S0373463313000404
|
| [10] |
XU T L.Federated IMM-UKF algorithm for multi-sensor data fusion[J].Advanced Materials Research, 2013, 753-755:2117-2120. doi: 10.4028/www.scientific.net/AMR.753-755.2117
|
| [11] |
ZHANG Y, CHEN H S, LUO Y.A novel infrared landmark indoor positioning method based on improved IMM-UKF[J].Applied Mechanics and Materials, 2014, 511-512:880-885. doi: 10.4028/www.scientific.net/AMM.511-512.880
|
| [12] |
徐晓苏, 闫琳宇, 吴晓飞, 等.基于粒子群优化的UKF在SINS/GPS组合导航中的应用[J].中国惯性技术学报, 2018, 26(2):196-201. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201802009
XU X S, YAN L Y, WU X F, et al.Unscented Kalman filter based on particle swarm optimization algorithm in SINS/GPS integrated navigation system[J].Journal of Chinese Inertial Technology, 2018, 26(2):196-201(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201802009
|
| [13] |
郭继峰, 李忠志, 张国强, 等.基于深度置信网络的卡尔曼滤波算法改进[J].计算机应用与软件, 2019, 36(6):248-253. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjyyyrj201906046
GUO J F, LI Z Z, ZHANG G Q, et al.Improvement of Kalman filter algorithm based on deep belief network[J].Computer Applications and Software, 2019, 36(6):248-253(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjyyyrj201906046
|
| [14] |
左东广, 韩崇昭, 郑林, 等.基于时变马尔科夫转移概率的机动目标多模型跟踪[J].西安交通大学学报, 2003, 37(8):824-828. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xajtdxxb200308013
ZUO D G, HAN C Z, ZHENG L, et al.Maneuvering target tracking based on time-varying Markov transition probabilities[J].Journal of Xi'an Jiaotong University, 2003, 37(8):824-828(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xajtdxxb200308013
|
| [15] |
郭志, 董春云, 蔡远利, 等.时变转移概率IMM-SRCKF机动目标跟踪算法[J].系统工程与电子技术, 2015, 37(1):24-30. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201501005
GUO Z, DONG C Y, CAI Y L, et al.Time-varying transition probability based IMM-SRCKF algorithm for maneuvering target tracking[J].Systems Engineering and Electronics, 2015, 37(1):24-30(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201501005
|
| [16] |
臧荣春, 崔平远.马尔可夫参数自适应IFIMM算法研究[J].电子学报, 2006, 34(3):521-524. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dianzixb200603031
ZANG R C, CUI P Y.Research on adaptive Markov parameter IFIMM algorithm[J].Acta Electronica Sinica, 2006, 34(3):521-524(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dianzixb200603031
|
| [17] |
潘泉, 杨峰, 叶亮, 等.一类非线性滤波器——UKF综述[J].控制与决策, 2005, 20(5):481-489. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc200505001
PAN Q, YANG F, YE L, et al.Survey of a kind of nonlinear filters-UKF[J].Control and Decision, 2005, 20(5):481-489(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc200505001
|
| [18] |
MIRJALILI S, MIRJALILI S M, LEWIS A.Grey wolf optimizer[J].Advances in Engineering Software, 2014, 69:46-61. doi: 10.1016/j.advengsoft.2013.12.007
|
| [19] |
姚鹏, 王宏伦.基于改进流体扰动算法与灰狼优化的无人机三维航路规划[J].控制与决策, 2016, 31(4):701-708. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201604019
YAO P, WANG H L.Three-dimensional path planning for UAV based on improved interfered fluid dynamical system and grey wolf optimizer[J].Control and Decision, 2016, 31(4):701-708(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201604019
|
| [20] |
BIAN X Q, ZHANG L, DU Z M, et al.Prediction of sulfur solubility in supercritical sour gases using grey wolf optimizer-based support vector machine[J].Journal of Molecular Liquids, 2018, 261:431-438. doi: 10.1016/j.molliq.2018.04.070
|
| [21] |
LIU H, WU H, LI Y.Smart wind speed forecasting using EWT decomposition, GWO evolutionary optimization, RELM learning and IEWT reconstruction[J].Energy Conversion and Management, 2018, 161:266-283. doi: 10.1016/j.enconman.2018.02.006
|
| [22] |
魏政磊, 赵辉, 黄汉桥, 等.基于SAGWO算法的UCAVs动态协同任务分配[J].北京航空航天大学学报, 2018, 44(8):1651-1664. doi: 10.13700/j.bh.1001-5965.2017.0589
WEI Z L, ZHAO H, HUANG H Q, et al.Dynamic UCAVs cooperative task allocation based on SAGWO algorithm[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(8):1651-1664(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0589
|
| [23] |
张凤娇, 魏民祥, 赵万忠.基于蚁群优化UKF算法的汽车状态估计[J].中国机械工程, 2015, 26(22):3046-3050. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjxgc201522011
ZHANG F J, WEI M X, ZHAO W Z.Vehicle state estimation based on ant colony optimization algorithm[J].China Mechanical Engineering, 2015, 26(22):3046-3050(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zgjxgc201522011
|
| [24] |
LI W, JIA Y.An information theoretic approach to interacting multiple model estimation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3):1811-1825. doi: 10.1109/TAES.2015.140542
|
| [25] |
封普文, 黄长强, 曹林平, 等.基于自适应马尔可夫参数交互多模型算法的弹道导弹跟踪研究[J].兵工学报, 2014, 35(12):2041-2049. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bgxb201412016
FENG P W, HUANG C Q, CAO L P, et al.Research on ballistic missile tracking based on adaptive Markov parameter IMM[J].Acta Armamentarii, 2014, 35(12):2041-2049(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bgxb201412016
|
| [26] |
刘娟丽.基于交互多模型的被动多传感器机动目标跟踪算法研究[D].西安: 西安电子科技大学, 2010.
LIU J L.Research on maneuvering target tracking based on interacting multiple model for multiple passive sensors[D].Xi'an: Xidian University, 2010(in Chinese).
|
| [27] |
张振兴, 杨任农, 张彬超, 等.空战飞行对敌目标逼近航迹跟踪仿真[J].空军工程大学学报(自然科学版), 2018, 19(2):33-37.
ZHANG Z X, YANG R N, ZHANG B C, et al.Air combat trajectory predict simulation for enemy target approach[J].Journal of Air Force Engineering University(Natural Science Edition), 2018, 19(2):33-37(in Chinese).
|

Figures(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: