| Citation: | LIU Chang, XIE Wenjun, ZHANG Peng, et al. UAV real-time route planning logical architecture in complex threat environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1948-1957. doi: 10.13700/j.bh.1001-5965.2019.0534(in Chinese)

|
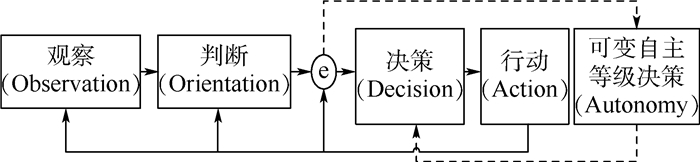
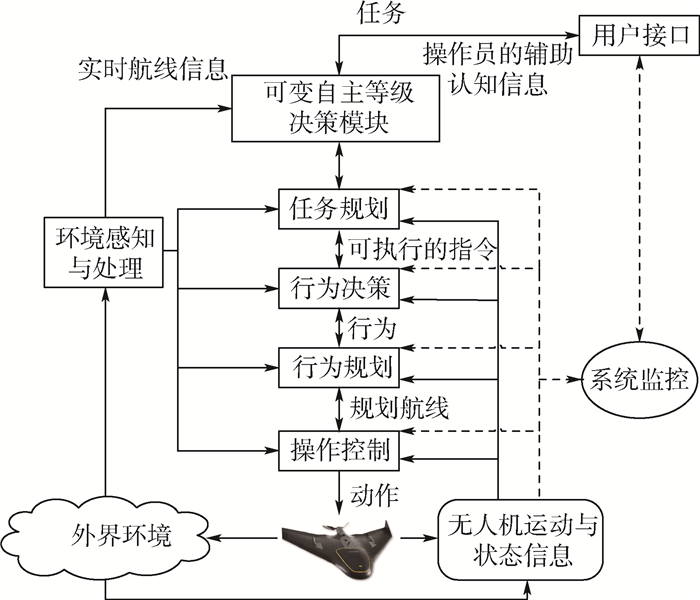
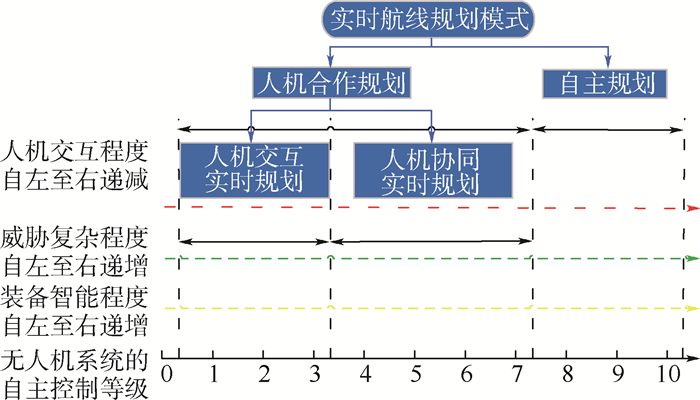
Facing the battlefield environment with high confrontation and strong rejection, real-time route planning is an important guarantee to ensure the Unmanned Aerial Vehicle (UAV) to complete combat missions and improve its survival probability. In order to enable UAV to choose the appropriate real-time route planning mode when facing different levels of complex threat environment, a real-time route planning logic structure of UAV based on fuzzy inference mechanism is proposed. Firstly, the real-time route planning mode is classified. From the perspective of autonomy, the human-machine authority allocation levels are re-divided, and the connection between the real-time route planning mode and the human-machine authority is established. Secondly, aimed at the risk of "trust crisis" in typical Observation, Orientation, Decision, Action(OODA) control cycle, a real-time route planning architecture based on variable autonomy is constructed and its logic is explained. Finally, the dynamic human-machine authority allocation of UAV system is realized by using fuzzy inference mechanism, and the real-time route planning mode is determined by judging the man-machine permission assignment level. The simulation results show that the logic structure of real-time route planning is reasonable and the method of variable autonomy is effective. After comprehensive analysis, the decision-making results of real-time route planning mode also accord with the actual operational requirements. Compared with the fuzzy comprehensive evaluation method, the proposed method has lower subjectivity, stronger practicability and more convincing results.

| [1] |
姚鹏, 王宏伦, 刘畅.基于动态流体扰动原理的三维滚动航路优化[J].北京航空航天大学学报, 2015, 41(12):2280-2287. doi: 10.13700/j.bh.1001-5965.2014.0773
YAO P, WANG H L, LIU C.Three-dimensional rolling path planning via dynamic fluid disturbance[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(12):2280-2287(in Chinese). doi: 10.13700/j.bh.1001-5965.2014.0773
|
| [2] |
PILARSKI G M.The concept of recommender system supporting command and control system in hierarchical organization[C]//2014 European Network Intelligence Conference.Piscataway: IEEE Press, 2014: 138-141.
|
| [3] |
United States Air Force Chief Scientist.Technology horizons-A vision for air force science & technology during 2010-2030: AF/ST-TR-10-01-PR[R].Washington, D.C.: U.S.Air Force, 2010.
|
| [4] |
胡晓峰, 荣明.智能化作战研究值得关注的几个问题[J].指挥与控制学报, 2018, 4(3):195-200. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=676687781
HU X F, RONG M.Several important questions of intelligent warfare research[J].Journal of Command and Control, 2018, 4(3):195-200(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=676687781
|
| [5] |
范伟伦, 李薇, 冯杭.基于改进RRT算法的无人机实时航迹规划[J].舰船电子工程, 2019, 39(2):56-60. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jcdzgc201902015
FAN W L, LI W, FENG H.UAV trajectory planning based on an improved RRT algorithm[J].Ship Electronic Engineering, 2019, 39(2):56-60(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jcdzgc201902015
|
| [6] |
WEN N F, SU X H, MA P J, et al.Online UAV path planning in uncertain and hostile environments[J].International Journal of Machine Learning & Cybernetics, 2015, 8(2):1-19. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b865112be0d60338232ef5a50a42c1ed
|
| [7] |
SUN X X, CAI C.Human-machine cooperation in unmanned aerial vehicle path planning based on cloud model[J].Automatic Target Recognition and Image Analysis, 2011, 8003(1):554-561. doi: 10.1117/12.901655
|
| [8] |
张帅, 李学仁, 张鹏, 等.基于人机合作的无人机实时航迹规划[J].北京航空航天大学学报, 2017, 43(4):814-822. doi: 10.13700/j.bh.1001-5965.2016.0271
ZHANG S, LI X R, ZHANG P, et al.UAV real-time path planning based on human-machine cooperation[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(4):814-822(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0271
|
| [9] |
任鹏, 高晓光.人机协同智能航迹规划算法[J].系统仿真学报, 2015, 27(2):313-319. http://www.cnki.com.cn/Article/CJFDTotal-XTFZ201502014.htm
REN P, GAO X G.Man-machine coordinated intell-igent flight path planning algorithm[J].Journal of System Simulation, 2015, 27(2):313-319(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-XTFZ201502014.htm
|
| [10] |
任鹏, 高晓光.有限干预下的UAV低空突防航迹规划[J].系统工程与电子技术, 2014, 36(4):679-684. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201404012
REN P, GAO X G.Human intervention flight path planning for UAV low-altitude penetration[J].Systems Engineering and Electronics, 2014, 36(4):679-684(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201404012
|
| [11] |
CUMMINGS M L, MARQUEZ J J, ROY N.Human-automated path planning optimization and decision support[J].Human-Computer Studies, 2012, 70(2):116-128. doi: 10.1016/j.ijhcs.2011.10.001
|
| [12] |
史美萍.基于人机协同的月球车路径规划技术研究[D].长沙: 国防科学技术大学, 2006: 56-62. http://cdmd.cnki.com.cn/Article/CDMD-90002-2007141102.htm
SHI M P.Research on path planning technology for lunar rover based on the human-machine cooperation[D].Changsha: National University of Defense Technology, 2006: 56-62(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-90002-2007141102.htm
|
| [13] |
谭雁英.基于人机合作策略下的SAS算法的多无人机路径再规划[J].西北工业大学学报, 2014, 32(5):688-692. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xbgydxxb201405005
TAN Y Y.Path replanning approach for multiple UAVs based on SAS (sparse A* search) algorithm under human automation collaboration[J].Journal of Northwestern Polytechnical University, 2014, 32(5):688-692(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xbgydxxb201405005
|
| [14] |
杨俊超, 史越, 马海明.一种人-自动化系统协作的无人机航迹规划方法[J].计算机测量与控制, 2015, 23(9):3216-3324. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjzdclykz201509084
YANG J C, SHI Y, MA H M.A route planning method for UAV based on collaborative human-automation RRT[J].Computer Measurement & Control, 2015, 23(9):3216-3324(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjzdclykz201509084
|
| [15] |
Office of the Secretary of Defense.Unmanned aircraft system roadmap 2005-2030: 20301[R].Washington, D.C.: Defense Science Board, 2005.
|
| [16] |
SHERIDAN T B.Automation, authority and angst-revisited[J].Proceeding of the Human Factors and Ergonomics Society Annual Meeting, 1991, 35(1):2-6. doi: 10.1177/154193129103500103
|
| [17] |
PARASORAMAN R, SHERIDAN T B, WICKENS C D.A model for types and levels of human interaction with automation[J].IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, 2000, 30(3):286-297. doi: 10.1109/3468.844354
|
| [18] |
HUANG H M.Autonomy levels for unmanned systems (ALFUS) framework: Safety and application issues[C]//Workshop on Performance Metrics for Intelligent Systems.New York: ACM, 2007: 48-53.
|
| [19] |
DoD.Unmanned systems integrated roadmap: FY 2013-2038[R].Washington, D.C.: Office of the Secretary of Defense, 2013.
|
| [20] |
Defense Science Board.The role of autonomy in DoD systems: 20301-3104[R].Washington, D.C.: Department of Defense Science Board, 2012.
|
| [21] |
杨哲, 张汝波.无人系统自主等级模糊评价方法[J].小型微型计算机系统, 2009, 30(10):2043-2047. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xxwxjsjxt200910026
YANG Z, ZHANG R B.Fuzzy evaluated method for the autonomy levels of unmanned systems[J].Journal of Chinese Computer, 2009, 30(10):2043-2047(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xxwxjsjxt200910026
|
| [22] |
陈宗基, 魏金钟, 王英勋, 等.无人机自主控制等级及其系统结构研究[J].航空学报, 2011, 32(6):1075-1083. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201106014
CHEN Z J, WEI J Z, WANG Y X, et al.UAV autonomous control levels and system structure[J].Acta Aeronautica et Astronautica Sinica, 2011, 32(6):1075-1083(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=hkxb201106014
|
| [23] |
谭雁英, 张波, 祝小平.自主飞行无人机任务规划的动态智能管理与执行策略[J].弹箭与制导学报, 2004, 24(7):121-123. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=djyzdxb200404041
TAN Y Y, ZHANG B, ZHU X P.Dynamic mission plan intelligent management and execution scheduling in autonomous UAVs[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2004, 24(7):121-123(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=djyzdxb200404041
|
| [24] |
王阔天, 张国忠, 沈林成, 等.多无人机监督控制的人机动态功能分配研究[J].计算机工程与应用, 2009, 45(30):245-248. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjgcyyy200930073
WANG K T, ZHANG G Z, SHEN L C, et al.Study on dynamic function allocation of human supervisory control multi-UAV[J].Computer Engineering and Applications, 2009, 45(30):245-248(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=jsjgcyyy200930073
|
| [25] |
毛红保, 田松, 晁爱农.无人机任务规划[M].北京:国防工业出版社, 2015:76-80.
MAO H B, TIAN S, CHAO A N.Unmanned aerial vehicle mission planning[M].Beijing:National Defense Industry Press, 2015:76-80(in Chinese).
|
| [26] |
胡中华, 赵敏.无人机任务规划系统研究及发展[J].航天电子对抗, 2009, 25(4):49-51. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=htdzdk200904015
HU Z H, ZHAO M.Research and development of UAV mission planning system[J].Aerospace Electronic Warfare, 2009, 25(4):49-51(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=htdzdk200904015
|
| [27] |
MICHAEL F L, MOON T, KRUZINS E.Proposed network centric metrics:From connectivity to the OODA cycle[J].MORS Journal, 2005, 10(1):24-26. http://www.ingentaconnect.com/content/mors/mor/2005/00000010/00000001/art00004
|
| [28] |
龙国庆, 祝小平, 周洲.多无人机系统协同多任务分配模型与仿真[J].飞行力学, 2011, 29(4):68-71. https://mall.cnki.net/magazine/Article/FHLX201104018.htm
LONG G Q, ZHU X P, ZHOU Z.Model and simulation of cooperative multi-task assignment for multi-UAV system[J].Flight Dynamics, 2011, 29(4):68-71(in Chinese). https://mall.cnki.net/magazine/Article/FHLX201104018.htm
|
| [29] |
FEIGH K M, DORNEICH M C, HAYES C C.Toward a characterization of adaptive systems:A framework for researchers and system designers[J].Human Factors:The Journal of the Human Factors and Ergonomics Society, 2012, 54(6):1008-1024. doi: 10.1177/0018720812443983
|
| [30] |
MACHARET D G, FLORENCIO D A.A collaborative control system for telepresence robots[C]//IEEE/RSJ International Conference on Intelligent Robots & Systems.Piscataway: IEEE Press, 2012: 5105-5111.
|
| [31] |
SHERIDAN T B, PARASURAMAN R.Human-automation interaction[J].Review of Human Factors and Ergonomics, 2005, 1(1):89-129. doi: 10.1518/155723405783703082
|
| [32] |
ANDREJS R, OLEG U.Application of fuzzy logic for risk assessment[J].Information Technology and Management Science, 2015, 17(1):50-54. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=itms-2014-0007
|
| [33] |
NEGNEVITSKY M.人工智能智能系统指南[M].陈薇, 等, 译.北京: 机械工业出版社, 2007: 85-100.
NEGNEVITSKY M.Artificial intelligence: A guide to intelligent systems[M].CHEN W, et al, translated.Beijing: Machinery Industry Press, 2007: 85-100(in Chinese).
|
| [34] |
李国勇, 杨丽娟.神经·模糊·预测控制及其MATLAB实现[M].北京:电子工业出版社, 2013:100-112.
LI G Y, YANG L J.Neural·fuzzy·predictive control and its MATLAB implementation[M].Beijing:Electronic Industry Press, 2013:100-112(in Chinese).
|
Figures(11) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: