| Citation: | LI Lei, REN Yuan, CHEN Xiaocen, et al. Design of MSCSG control system based on ADRC and RBF neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1966-1972. doi: 10.13700/j.bh.1001-5965.2019.0536(in Chinese)

|
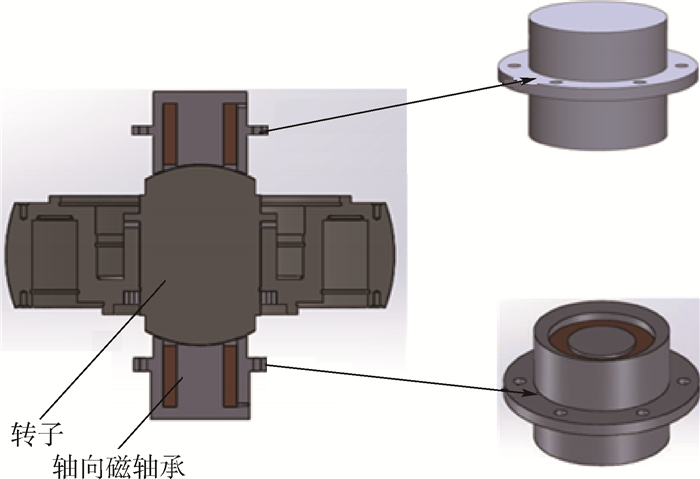
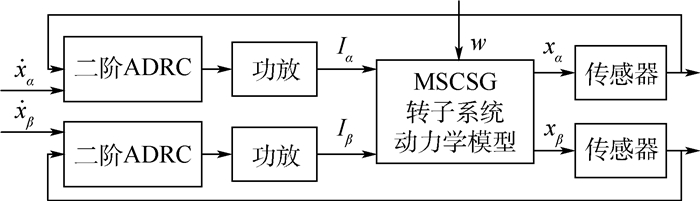
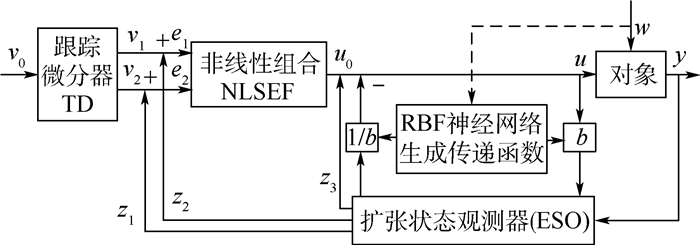
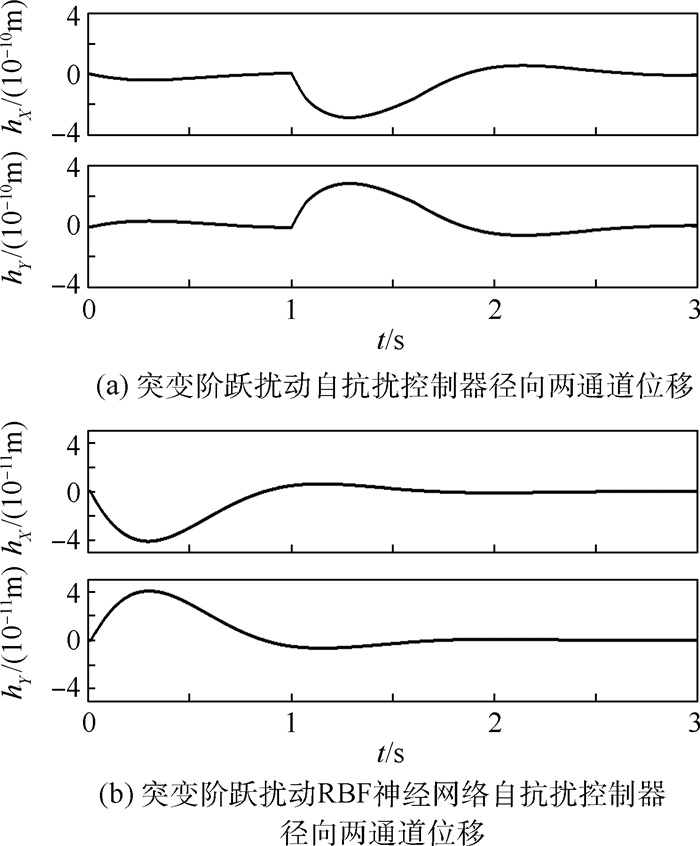
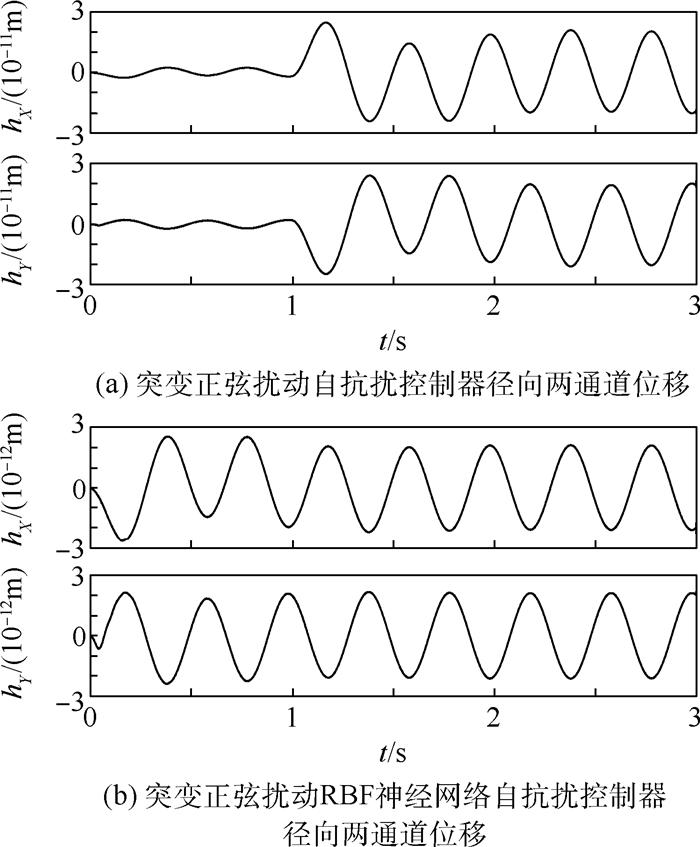
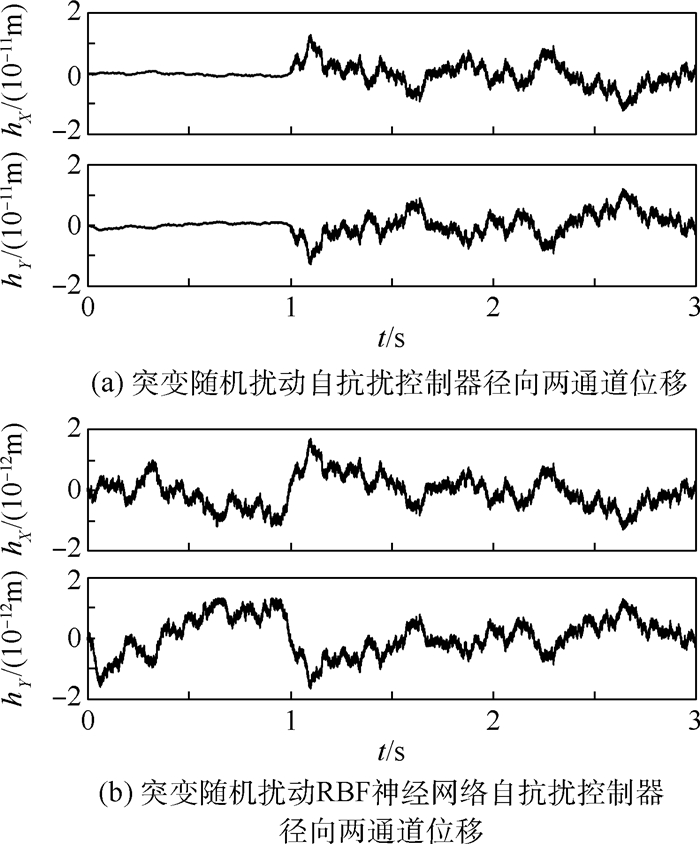
In order to overcome the influence of external disturbance mutation on the suspension stability of magnetic suspension rotor and the output torque precision of Magnetic Suspension Control Sensitive Gyro (MSCSG), a MSCSG radial deflection control method based on the combination of Auto Disturbance Rejection Controller (ADRC) and Radial Basis Function (RBF) neural network is proposed. The influence of ADRC parameters on the control effect of MSCSG is clarified. By optimizing the design of ADRC and combining RBF neural network with ADRC, the real-time debugging of controller parameters can be realized so as to overcome the impact of external disturbance mutation. It is proved by simulation that compared with single ADRC control, this method not only improves the accuracy of decoupling control, but also improves the response speed and robustness of the system to external disturbances and parameter changes. It can be applied to the MSCSG with high precision, fast response and strong robustness control.

| [1] |
REN Y, CHEN X C, CAI Y W, et al.Attitude-rate measurement and control integration using magnetically suspended control and sensitive gyroscopes[J].IEEE Transactions on Industrial Electronics, 2017, 65(6):4921-4932. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=7e8cad61438d69e4b9addfd39a7800e4
|
| [2] |
舒适, 房建成, 张伟, 等.基于MSCMG大型遥感卫星高精度姿态控制方法[J].中国惯性技术学报, 2017, 25(4):421-431. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201704001
SHU S, FANG J C, ZHANG W, et al.High-precision attitude control method based on MSCMG for large-scale remote sensing satellite[J].Journal of Chinese Inertial Technology, 2017, 25(4):421-431(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zggxjsxb201704001
|
| [3] |
王平, 王华, 任元.基于MSCMG金字塔构型的航天器姿态测控一体化控制方法[J].系统工程与电子技术, 2016, 38(1):123-129. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201601020
WANG P, WANG H, REN Y.Measurement and control integrated method for spacecraft attitude based on MSCMGs with pyramid configuration[J].Systems Engineering and Electron-ics, 2016, 38(1):123-129(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=xtgcydzjs201601020
|
| [4] |
CHEN X C, CAI Y W, REN Y, et al.Spacecraft angular rates and angular acceleration estimation using single-gimbal mag netically suspended control moment gyros[J].IEEE Transactions on Industrial Electronics, 2019, 66(1):440-450. doi: 10.1109/TIE.2018.2826468
|
| [5] |
XU G F, CAI Y W, REN Y, et al.Application of a new Lorentz force-type tilting control magnetic bearing in a magnetically suspended control sensitive gyroscope with cross-sliding mode control[J].Transactions of the Japan Society for Aeronautical and Space Sciences, 2018, 61(1):40-47. doi: 10.2322/tjsass.61.40
|
| [6] |
陈晓岑, 周东华, 陈茂银.基于逆系统方法的DGMSCMG框架伺服系统解耦控制研究[J].自动化学报, 2013, 39(5):502-509. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201305005
CHEN X C, ZHOU D H, CHEN MAO Y.Decoupling control of gimbal servo system of DGMSCMG based on dynamic inverse system method[J].Acta Automatica Sinica, 2013, 39(5):502-509(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=zdhxb201305005
|
| [7] |
夏长峰, 蔡远文, 任元, 等.MSCSG转子不平衡振动原理分析与建模[J].北京航空航天大学学报, 2018, 44(11):2321-2328. doi: 10.13700/j.bh.1001-5965.2018.0044
XIA C F, CAI Y W, REN Y, et al.Principle analysis and modeling of rotor imbalance vibration in magnetically suspended control and sensing gyroscope[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(11):2321-2328(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0044
|
| [8] |
夏长峰, 蔡远文, 任元, 等.磁悬浮控制敏感陀螺转子前馈解耦内模控制[J].北京航空航天大学学报, 2018, 44(3):480-488. doi: 10.13700/j.bh.1001-5965.2017.0190
XIA C F, CAI Y W, REN Y, et al.Feedforward decoupling and internal model control for rotor of magnetically suspended control and sensing gyroscope[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):480-488(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0190
|
| [9] |
ZHAO C Z, YI H.Design ADRC for two special kinds of sys-tems[C]//Proceedings of the 30th Chinese Control Conference.Piscataway: IEEE Press, 2011: 229-234.
|
| [10] |
薛立娟, 李海涛, 李红, 等.基于ADRC的MSCMG框架系统高精度控制[J].北京航空航天大学学报, 2012, 38(11):1497-1501. https://bhxb.buaa.edu.cn/CN/Y2012/V/I11/1497
XUE L J, LI H T, LI H, et al.High precision control based on ADRC used in gimbal system of MSCMG[J].Journal of Beijing University of Aeronautics and Astronautics, 2012, 38(11):1497-1501(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2012/V/I11/1497
|
| [11] |
HERBST G.A simulative study on active disturbance rejection control (ADRC) as a control tool for practitioners[J].Electronics, 2013, 2(3):246-279. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=MDPI000000089951
|
| [12] |
王平, 王华, 任元.磁悬浮控制力矩陀螺转子系统径向自抗扰解耦控制和扰动抑制[J].兵工自动化, 2015, 34(10):59-63. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bgzdh201510017
WANG P, WANG H, REN Y.Decoupling control and disturbance rejection of radial rotor system in magnetically suspended control moment gyro based on ADRC[J].Ordnance Industry Automation, 2015, 34(10):59-63(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bgzdh201510017
|
| [13] |
YU C M, WANG Z, REN Y, et al.MSCSG two degree of freedom attitude measurement method[J].Journal of Physics:Conference Series, 2019, 1176(4):042054. http://www.socolar.com/Article/Index?aid=100001272439&jid=
|
| [14] |
石晨曦.自抗扰控制及控制器参数整定方法的研究[D].无锡: 江南大学, 2008: 15-20. http://cdmd.cnki.com.cn/Article/CDMD-10295-2009014842.htm
SHI C X.Auto-disturbance rejections controllers and the parameter adjusting[D].Wuxi: Jiangnan University, 2008: 15-20(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10295-2009014842.htm
|
| [15] |
李明, 封航, 张延顺.基于UMAC的RBF神经网络PID控制[J].北京航空航天大学学报, 2018, 44(10):2063-2070. doi: 10.13700/j.bh.1001-5965.2017.0777
LI M, FENG H, ZHANG Y S.RBF neural network tuning PID control based on UMAC[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10):2063-2070(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0777
|
| [16] |
YANG S, CAO Y, PENG Z, et al.Distributed formation control of nonholonomic autonomous vehicle via RBF neural network[J].Mechanical Systems and Signal Processing, 2017, 87(B):81-95. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fa0148c5e9e832112bcfdf38ff8b2606
|
Figures(9) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: