| Citation: | LI Ting, WANG Xinmin, YANG Ting, et al. Fault-tolerant synchronization control for a dual redundant electro-hydraulic actuator system based on velocity estimation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10): 1929-1940. doi: 10.13700/j.bh.1001-5965.2019.0564(in Chinese)

|
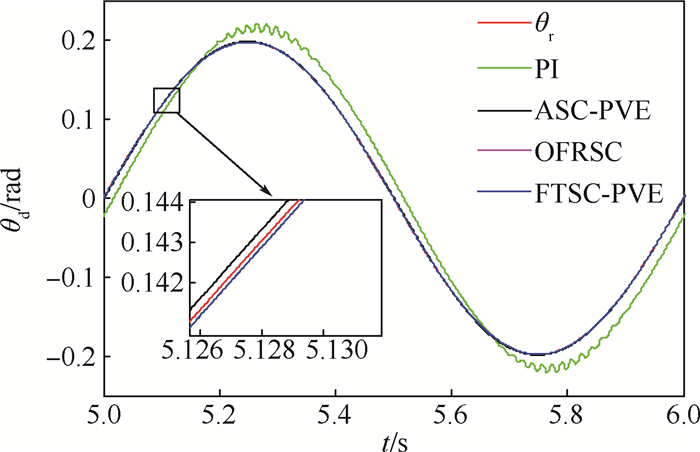
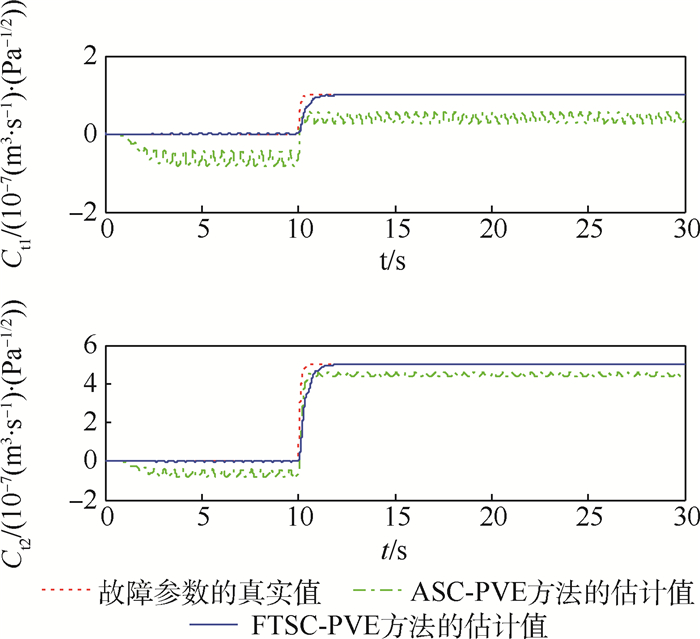
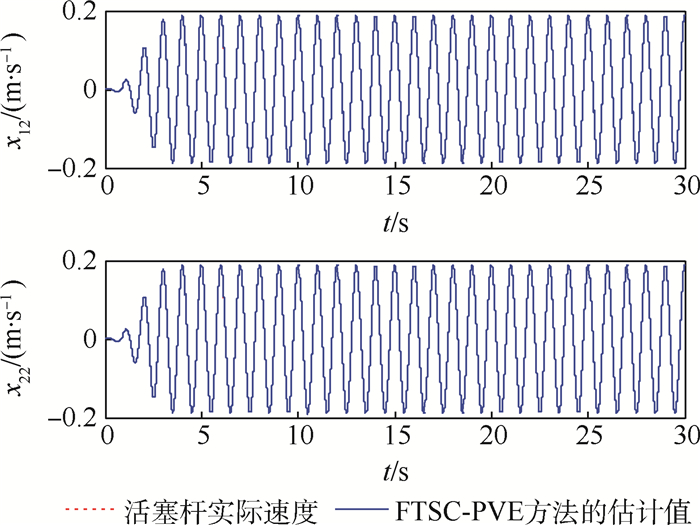
Considering the fact that the piston velocity measurements of electro-hydraulic actuators are not available in practice, a fault-tolerant synchronization control strategy based on piston velocity estimation is proposed to deal with the positon tracking problem for a Dual Redundant Electro-Hydraulic Actuator System (DREHAS) suffering from Internal Leakage Common-Mode Fault (IL-CMF) and disturbances. First, by introducing two groups of reference trajectory and a linear transformation of the system states, the decoupling of the control surface position tracking and the two actuators output force synchronization control is realized. Second, an Adaptive Extended State Observer (AESO) is designed to estimate the piston rod velocities and disturbances of the two-channel actuators, which overcomes the inaccuracy of the estimation results of Extended State Observer (ESO) under fault condition. Finally, based on the state estimation and the online adaptation of faulty parameters, a nonlinear fault-tolerant synchronization controller is developed by employing backstepping method. Lyapunov stability analysis indicates that the proposed scheme can ensure that all the signals of the closed-loop system are bounded and the system can achieve a prescribed tracking performance under IL-CMF and time-varying disturbances. Moreover, the system tracking error converges to zero asymptotically in the present of IL-CMF and constant disturbances. A simulation experiment validates that the proposed control scheme is effective.

| [1] |
RYDER D R.Redundancy actuator development study: N76-31177[R].Seattle: Boeing Commercial Airplane Corp., 1973: 1011-1012.
|
| [2] |
MITRA S, SAXENA N R, MCCLUSKEY E J.Common-mode failures in redundant VLSI systems:A survey[J].IEEE Transactions on Reliability, 2000, 49(3):285-295. doi: 10.1109/24.914545
|
| [3] |
KARPENKO M, SEPEHRI N.Quantitative fault tolerant control design for a leaking hydraulic actuator[J].Journal of Dynamic Systems, Measurement, and Control, 2010, 132(5):626-634. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ce46bdd6d70b2b817a45cf2dae3fb83e
|
| [4] |
MAHULKAR V, ADAMS D E, DERRISO M.Adaptive fault tolerant control for hydraulic actuators[C]//Proceedings of the American Control Conference.Piscataway: IEEE Press, 2015: 2242-2247. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=7171066
|
| [5] |
NAHIAN S A, TRUONG D Q, CHOWDHURY P.Modeling and fault tolerant control of an electro-hydraulic actuator[J].International Journal of Precision Engineering and Manufacturing, 2016, 17(10):1285-1297. doi: 10.1007/s12541-016-0153-2
|
| [6] |
ZHAO Z.Active fault tolerant control of an electro-hydraulic driven elevator based on robust adaptive observers[D].Montreal: Concordia University, 2010: 131-169. http://spectrum.library.concordia.ca/979392/
|
| [7] |
SHI C, WANG S P, WANG X J, et al.Active fault-tolerant control of dissimilar redundant actuation system based on performance degradation reference models[J].Journal of the Franklin Institute-Engineering and Applied Mathematics, 2017, 354(2):1087-1108. doi: 10.1016/j.jfranklin.2016.11.008
|
| [8] |
LI T, YANG T, CAO Y Y, et al.Disturbance-estimation based adaptive backstepping fault-tolerant synchronization control for a dual redundant hydraulic actuation system with internal leakage faults[J].IEEE Access, 2019, 7:73106-73119. doi: 10.1109/ACCESS.2019.2920415
|
| [9] |
SHI C, WANG X J, WANG S P, et al.Adaptive decoupling synchronous control of dissimilar redundant actuation system for large civil aircraft[J].Aerospace Science and Technology, 2015, 47:114-124. doi: 10.1016/j.ast.2015.09.012
|
| [10] |
WANG X J, SHI C, WANG S P.Extended state observer-based motion synchronization control for hybrid actuation system of large civil aircraft[J].International Journal of System Science, 2017, 48(10):2212-2222. doi: 10.1080/00207721.2017.1309592
|
| [11] |
齐海涛, 滕雅婷.双余度电静液作动器力均衡控制[J].北京航天航空大学学报, 2017, 43(2):270-276. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201702008
QI H T, TENG Y T.Force equalization control for dual-redundancy electro-hydrostatic actuator[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(2):270-276(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201702008
|
| [12] |
付永领, 范殿梁, 李祝锋.非相似余度作动系统静态力均衡控制策略[J].北京航天航空大学学报, 2014, 40(11):1492-1499. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201411003
FU Y L, FAN D L, LI Z F.Static force equalization for dissimilar redundant actuator system[J].Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(11):1492-1499(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=bjhkhtdxxb201411003
|
| [13] |
NA J, LI Y P, HUANG Y B, et al.Output feedback control of uncertain hydraulic servo systems[J].IEEE Transactions on Industrial Electronics, 2020, 67(1):490-500. doi: 10.1109/TIE.2019.2897545
|
| [14] |
YAO J Y, JIAO Z X, MA D W.Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping[J].IEEE Transactions on Industrial Electronics, 2014, 61(11):6285-6293. doi: 10.1109/TIE.2014.2304912
|
| [15] |
GUO W W, YAO J Y, YAO Z K, et al.Output feedback model predictive control of hydraulic systems with disturbances compensation[J].ISA Transactions, 2019, 88:216-224. doi: 10.1016/j.isatra.2018.12.007
|
| [16] |
JELALI M, KROLL A.Hydraulic servo systems-modeling, identification and control[M].Berlin:Springer, 2003:102-103.
|
| [17] |
LI T, YANG T, CAO Y Y, et al.Adaptive robust fault-tolerant synchronization control for a dual redundant hydraulic actuation system with common-mode fault[J].Mathematical Problems in Engineering, 2018, 2018:6570104.
|
| [18] |
YAO B, BU F, REEDY J, et al.Adaptive robust motion control of single-rod hydraulic actuators:Theory and experiments[J].IEEE-ASME Transactions on Mechatronics, 2000, 5(1):79-91. http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=828592
|
| [19] |
YAO J, DENG W.Active disturbance rejection adaptive control of hydraulic servo systems[J].IEEE Transactions on Industrial Electronics, 2017, 64(10):8023-8032. doi: 10.1109/TIE.2017.2694382
|

Figures(8) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: