| Citation: | WANG Junhui, SUN Rui, CHENG Qi, et al. Comparison of direct and indirect filtering modes for UAV integrated navigation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(11): 2156-2167. doi: 10.13700/j.bh.1001-5965.2019.0578(in Chinese)

|
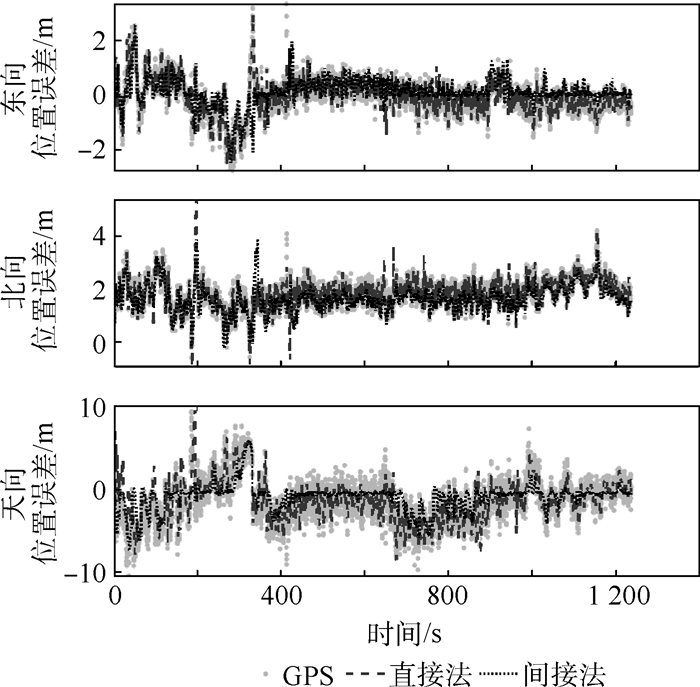
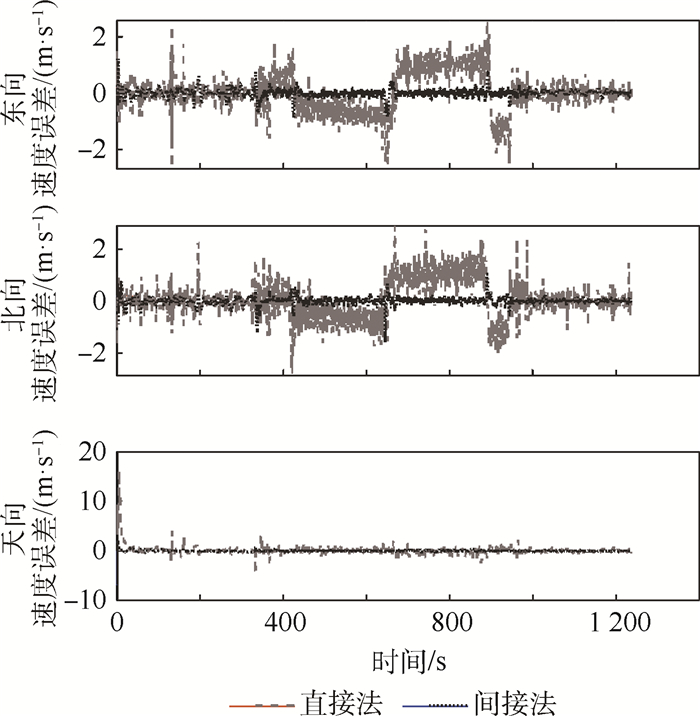
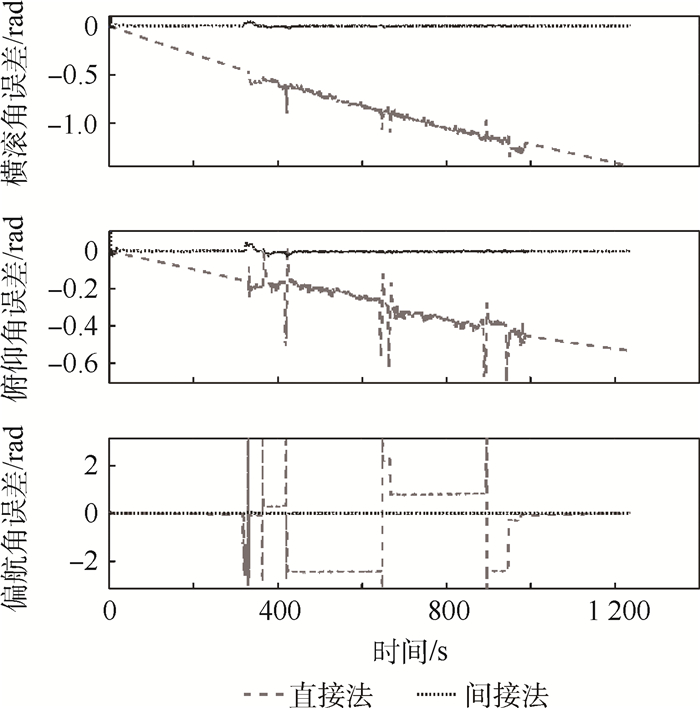
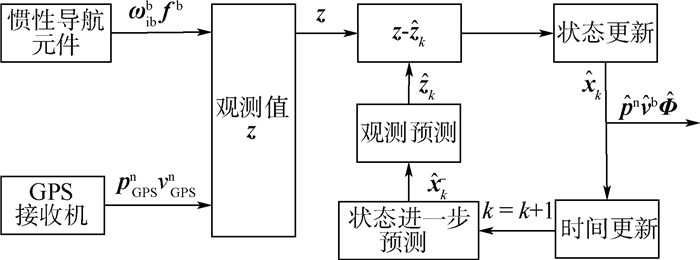
Global Navigation Satellite System/Inertial Navigation System (GNSS/INS) integrated navigation that could provide continuous and high-accuracy position, velocity and attitude are widely used in UAV state estimation. Particularly, the design of filtering algorithm is the key to the integration. Besides, different modes of integrated navigation influence the navigation and positioning results. In this paper, the direct and indirect modes based Extended Kalman Filter (EKF) algorithms are designed for the loosely-coupled Glolal Positioning System/Inertial Navigation System (GPS/INS) integration in Unmanned Aerial Vehicle (UAV) state estimation and tested in different scenarios. The results of simulation and field test indicate that the integration algorithm with the indirect mode can provide higher accuracy and stability state estimation results than the direct mode but with an increased computational cost. It is recommended to choose the indirect mode based integration for the applications with higher accuracy and reliability, while for the applications with the requirements of lower accuracy and fast computation, the direct mode based integration is recommended to reduce the system cost.

| [1] |
BIAN H W, JIN Z H, TIAN W F.IAE-adaptive Kalman filter for INS/GPS integrated navigation system[J].Journal of Systems Engineering and Electronics, 2006, 17(3):502-508. doi: 10.1016/S1004-4132(06)60086-8
|
| [2] |
高为广, 杨元喜, 崔先强, 等.IMU/GPS组合导航系统自适应Kalman滤波算法[J].武汉大学学报(信息科学版), 2006, 31(5):466-469.
GAO W G, YANG Y X, CUI X Q, et al.Adaptive Kalman filtering algorithm for IMU/GPS integrated navigation system[J].Journal of Wuhan University(Information Science Edition), 2006, 31(5):466-469(in Chinese).
|
| [3] |
ZHAO Y W.Performance evaluation of cubature Kalman filter in a GPS/IMU tightly-coupled navigation system[J].Signal Processing, 2016, 119(2):67-79.
|
| [4] |
ZHOU J C, KNEDLIK S, LOFFELD O.INS/GPS tightly-coupled integration using adaptive unscented particle filter[J].Journal of Navigation, 2010, 63(3):491-511. doi: 10.1017/S0373463310000068
|
| [5] |
向礼, 刘雨, 苏宝库.一种新的粒子滤波算法在INS/GPS组合导航系统中的应用[J].控制理论与应用, 2010, 27(2):159-163.
XIANG L, LIU Y, SU B K.Application of a new particle filter algorithm in INS/GPS integrated navigation system[J].Control Theory & Applications, 2010, 27(2):159-163(in Chinese).
|
| [6] |
肖乾.伪距GPS/INS组合导航系统的多模型自适应卡尔曼滤波器设计[J].船舶工程, 2005, 27(6):59-62. http://www.cnki.com.cn/Article/CJFDTotal-CANB200506019.htm
XIAO Q.Design of multi-model adaptive Kalman filter for pseudo-wide GPS/INS integrated navigation system[J].Ship Engineering, 2005, 27(6):59-62(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-CANB200506019.htm
|
| [7] |
HAJIYEV C, TUTUCU M A.Development of GPS aided INS via federated Kalman filter[C]//Proceedings of International Conference on Recent Advances in Space Technologies.Piscataway: IEEE Press, 2003: 569-574.
|
| [8] |
张锐, 张长虹, 李光春, 等.联邦卡尔曼滤波在INS/GPS组合导航中的应用[J].弹箭与制导学报, 2005, 25(4):314-317. http://www.cnki.com.cn/Article/CJFDTotal-DJZD2005SA003.htm
ZHANG R, ZHANG C H, LI G C, et al.Application of federated Kalman filter in INS/GPS integrated navigation[J].Journal of Projectiles, Rockets and Guidance, 2005, 25(4):314-317(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-DJZD2005SA003.htm
|
| [9] |
GEORGY J, IQBAL U, NOURELDIN A.Quantitative comparison between Kalman filter and particle filter for low cost INS/GPS integration[C]//2009 6th International Symposium on Mechatronics and its Applications.Piscataway: IEEE Press, 2009: 1-7.
|
| [10] |
陈坡, 孙付平, 李海峰, 等.两种滤波方法在SINS/GPS组合导航中的分析比较[J].测绘科学, 2009, 34(4):44-46. http://www.cnki.com.cn/Article/CJFDTotal-CHKD200904013.htm
CHEN P, SUN F P, LI H F, et al.Analysis and comparison of two filtering methods in SINS/GPS integrated navigation[J].Science and Mapping Science, 2009, 34(4):44-46(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-CHKD200904013.htm
|
| [11] |
NIE Q, GAO X Y.Comparison of nonlinear filtering approach in tightly-coupled GPS/INS navigation system[C]//Proceedings of the 10th World Congress on Intelligent Control and Automation.Piscataway: IEEE Press, 2012: 1176-1181.
|
| [12] |
仇立成, 姚宜斌, 祝程程.GPS/INS松组合与紧组合的实现与定位精度比较[J].测绘地理信息, 2013, 38(3):17-19. http://www.cnki.com.cn/Article/CJFDTotal-CHXG201303007.htm
QIU L C, YAO Y B, ZHU C C.Comparison of GPS/INS loose combination and compact combination implementation and positioning accuracy[J].Geographical Surveying and Mapping, 2013, 38(3):17-19(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-CHXG201303007.htm
|
| [13] |
李妍妍.GPS/INS耦合结构和融合算法研究[D].成都: 电子科技大学, 2014.
LI Y Y.Research on GPS/INS coupling structure and fusion algorithm[D].Chengdu: University of Electronic Science and Technology of China, 2014(in Chinese).
|
| [14] |
李荣冰, 刘建业, 赖际舟, 等.Sigma-Point直接式卡尔曼滤波惯性组合导航算法[J].控制与决策, 2009, 24(7):1018-1022. http://www.cnki.com.cn/Article/CJFDTotal-KZYC200907011.htm
LI R B, LIU J Y, LAI J Z, et al.Sigma-Point direct Kalman filter inertial combined navigation algorithm[J].Control and Decision, 2009, 24(7):1018-1022(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-KZYC200907011.htm
|
| [15] |
逯峤, 马国梁, 张平, 等.SR-CDKF在组合导航直接法滤波中的应用[J].弹道学报, 2017, 29(4):29-34. http://www.cnki.com.cn/Article/CJFDTOTAL-DDXB201704006.htm
LU Q, MA G L, ZHANG P, et al.Application of SR-CDKF in direct navigation filtering of integrated navigation[J].Journal of Ballistics, 2017, 29(4):29-34(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DDXB201704006.htm
|
| [16] |
徐田来, 游文虎, 崔平远.基于模糊自适应卡尔曼滤波的INS/GPS组合导航系统算法研究[J].宇航学报, 2005, 26(5):571-575. http://www.cnki.com.cn/Article/CJFDTotal-YHXB200505008.htm
XU T L, YOU W H, CUI P Y.Research on INS/GPS integrated navigation system algorithm based on fuzzy adaptive Kalman filter[J].Journal of Astronautics, 2005, 26(5):571-575(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-YHXB200505008.htm
|
| [17] |
吴富梅, 杨元喜.基于小波阈值消噪自适应滤波的GPS/INS组合导航[J].测绘学报, 2007, 36(2):124-128. http://www.cnki.com.cn/article/cjfdtemp-chxb200702001.htm
WU F M, YANG Y X.GPS/INS Integrated navigation based on wavelet threshold denoising adaptive filtering[J].Journal of Surveying and Mapping, 2007, 36(2):124-128(in Chinese). http://www.cnki.com.cn/article/cjfdtemp-chxb200702001.htm
|
| [18] |
LI K L, HU B Q, CHANG L B, et al.Comparison of direct navigation mode and indirect navigation mode for integrated SINS/GPS[J].Transactions of the Institute of Measurement and Control, 2016, 38(1):958-963.
|
| [19] |
SAVAGE P G.Strapdown inertial navigation integration algorithm design.Part 2:Velocity and position algorithms[J].Journal of Guidance, Control, and Dynamics, 1998, 21(2):208-221. doi: 10.2514/2.4242
|
| [20] |
SAVAGE P G.Strapdown inertial navigation integration algorithm design.Part 1:Attitude algorithms[J].Journal of Guidance, Control, and Dynamics, 1998, 22(1):19-28.
|
Figures(18) / Tables(14)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: