| Citation: | WANG Shu, ZHENG Shiqiang. Composite control method for gimbal excitation effect suppression of magnetically suspended CMGs[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2339-2347. doi: 10.13700/j.bh.1001-5965.2019.0610(in Chinese)

|
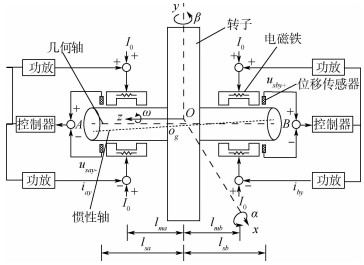
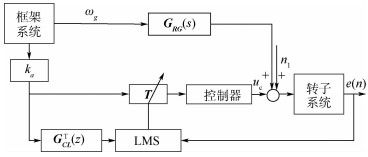
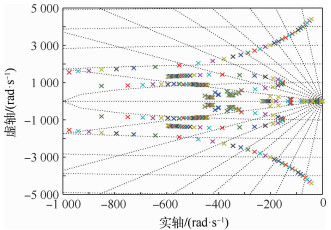
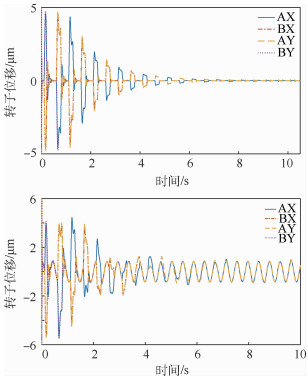
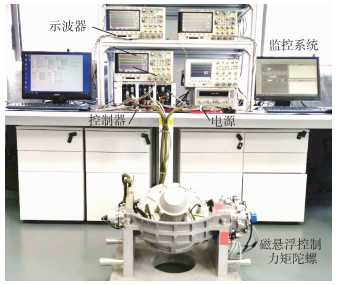
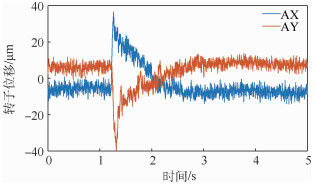
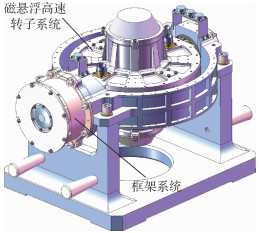
Aimed at the problem that the rotor suspension precision and stability will be reduced due to the gimbal excitation effect of the Magnetically Suspended Control Moment Gyroscope (MSCMG), a composite control method combining angular acceleration rate adaptive feedforward control and Active Disturbance Rejection Control (ADRC) is proposed in this paper. The dynamic model of MSCMG rotor is established, the disturbance torque of magnetic bearing under frame rotation is analyzed, an angular acceleration rate adaptive algorithm and a linear expansion state observer are designed, and a composite controller is designed with state feedback control. Meanwhile, the stability of the magnetic bearing system is analyzed. The simulation results of the magnetic bearing system verify the effectiveness of the proposed composite control method. The prototype developed in the laboratory was used to build a test platform for verification, and the results show that this method could effectively improve the anti-interference ability of the maglev system. The test platform is built by the developed prototype for verification. The results show that, compared with the traditional PID control method, the displacement peak of the convergent magnetic suspension rotor is reduced by 39.6%, and the anti-interference ability of the magnetic suspension system is improved.

| [1] |
房建成, 任元.磁悬浮控制力矩陀螺技术[M].北京:国防工业出版社, 2014:1-17.
FANG J C, REN Y.Magnetically suspended control moment gyroscope technology[M].Beijing:National Defense Industry Press, 2014:1-17(in Chinese).
|
| [2] |
李海涛, 房建成.基于扩张状态观测器的DGMSCMG框架伺服系统振动抑制方法[J].航空学报, 2010, 31(6):1213-1219.
LI H T, FANG J C.Study on system vibration suppression method based on ESO used in gimbal servo system of DGMSCMG[J].Acta Aeronautica et Astronautica Sinica, 2010, 31(6):1213-1219(in Chinese).
|
| [3] |
邓瑞清, 赵岩, 房建成, 等.磁悬浮飞轮与机械飞轮干扰特性的对比分析[J].宇航学报, 2016, 37(8):917-923.
DENG R Q, ZHAO Y, FANG J C, et al.Disturbance characteristics analysis of magnetically suspended and mechanical flywheels[J].Journal of Astronautica, 2016, 37(8):917-923(in Chinese).
|
| [4] |
谢进进, 刘刚, 文通.双框架磁悬浮控制力矩陀螺磁轴承负载力矩复合补偿的控制[J].光学精密工程, 2015, 23(8):2211-2219.
XIE J J, LIU G, WEN T.Composite compensation for load torque of active magnetic bearing in DGMSCMG[J].Optics and Precision Engineering, 2015, 23(8):2211-2219(in Chinese).
|
| [5] |
刘强, 赵勇, 曹建树, 等.新型微框架磁悬浮飞轮用洛伦兹力磁轴承[J].宇航学报, 2017, 38(5):481-489. http://www.cnki.com.cn/Article/CJFDTotal-YHXB201705006.htm
LIU Q, ZHAO Y, CAO J S, et al.Lorentz magnetic bearing for novel vernier gimballing magnetically suspended flywheel[J].Journal of Aatronautics, 2017, 38(5):481-489(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-YHXB201705006.htm
|
| [6] |
霍甲, 魏彤, 房建成.基于简化FXLMS算法的磁悬浮控制力矩陀螺动框架效应精确补偿方法实验研究[J].宇航学报, 2010, 31(3):786-792.
HUO J, WEI T, FANG J C.Experimental research on accurate compensation of moving-gimbal effects based on simplified FXLMS algorithm in magnetically suspended control moment gyroscope[J].Journal of Astronautica, 2010, 31(3):786-792(in Chinese).
|
| [7] |
田希晖, 房建成, 刘刚.一种磁悬浮飞轮增益预调交叉反馈控制方法[J].北京航空航天大学学报, 2006, 32(11):1299-1303. http://d.wanfangdata.com.cn/Periodical/bjhkhtdxxb200611009
TIAN X H, FANG J C, LIU G.Gain scheduling cross feedback control approach for magnetic suspending flywheel[J].Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(11):1299-1303(in Chinese). http://d.wanfangdata.com.cn/Periodical/bjhkhtdxxb200611009
|
| [8] |
王澄泓, 汪希平, 吴明贵.电磁推力轴承刚度非线性的研究[J].机械科学与技术, 2005, 24(9):54-57.
WANG C H, WANG X P, WU M G.Study on non-linearity of stiffness of magnetic thrust bearing[J].Mechanical Science and Technology, 2005, 24(9):54-57(in Chinese).
|
| [9] |
SUZUKI Y.Acceleration feedforward control for active magnetic bearing systems excited by ground motion[J].IEEE Proceedings of Control Theory and Applications, 1998, 145(2):113-118.
|
| [10] |
魏彤, 房建成.磁悬浮控制力矩陀螺的动框架效应及其角速率前馈控制方法研究[J].宇航学报, 2005, 26(1):19-23.
WEI T, FANG J C.Moving-gimbal effect and angular rate feedforward control in magnetically suspended rotor system of CMG[J].Journal of Astronautics, 2005, 26(1):19-23(in Chinese).
|
| [11] |
吕奇超, 吕东元, 李延宝, 等.小型磁悬浮CMG高速转子动框架效应前馈补偿与实验[J].飞控与探测, 2019, 2(1):49-55. http://www.cnki.com.cn/Article/CJFDTotal-FKTC201901008.htm
LV Q C, LV D Y, LI Y B, et al.Feed-forward compensation and experiment research in moving gimbal effects on high speed rotor of small magnetically suspended CMG[J].Flight Control and Detection, 2019, 2(1):49-55(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-FKTC201901008.htm
|
| [12] |
魏彤, 房建成.磁悬浮控制力矩陀螺动框架效应的FXLMS自适应精确补偿控制方法仿真研究[J].宇航学报, 2006, 27(6):1205-1210. http://www.cqvip.com/Main/Detail.aspx?id=23719189
WEI T, FANG J C.Accurate compensation of moving-gimbal effects based on FXLMS algorithm in magnetically suspended control moment gyroscope[J].Journal of Astronautics, 2006, 27(6):1205-1210(in Chinese). http://www.cqvip.com/Main/Detail.aspx?id=23719189
|
| [13] |
KANG M, YOON W.Acceleration feedforward control in active magnetic bearing system subject to base motion by filtered-X LMS algorithm[J].IEEE Translations on Control Systems Technology, 2006, 14(1):134-141.
|
| [14] |
韩京清.自抗扰控制技术-估计补偿不确定因素的控制技术[M].北京:国防工业出版社, 2008:150-260.
HAN J Q.Active disturbance rejection control technique -The technique for estimating and compensation the uncertainties[M].Beijing:National Defense Industry Press, 2008:150-260(in Chinese).
|
| [15] |
韩京清.自抗扰控制器及其应用[J].控制与决策, 1998, 13(1):19-23.
HAN J Q.Auto-disturbances-rejection controller and its applications[J].Control and Decision, 1998, 13(1):19-23(in Chinese).
|
| [16] |
丛爽, 孙光立, 邓科, 等.陀螺稳定平台扰动的自抗扰及其滤波控制[J].光学精密工程, 2016, 24(1):169-177.
CONG S, SUN G L, DENG K, et al.Active disturbance rejection and filter control of gyro-stabilized platform[J].Optics and Precision Engineering, 2016, 24(1):169-177(in Chinese).
|
| [17] |
李磊, 任元, 陈晓岑, 等.基于ADRC和RBF神经网络的MSCSG控制系统设计[J].北京航空航天大学学报, 2020, 46(10):1966-1972.
LI L, REN Y, CHEN X C, et al.Design of MSCSG control system based on active disturbance rejection controller and RBF neural network[J].Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(10):1966-1972.
|
| [18] |
魏彤, 房建成, 刘珠荣.双框架磁悬浮控制力矩陀螺动框架效应补偿方法[J].机械工程学报, 2010, 46(2):159-165.
WEI T, FANG J C, LIU Z R.Moving-gimbal effects compensation of double gimbal magnetically suspended control moment gyroscope based on compound control[J].Journal of Mechanical Engineering, 2010, 46(2):159-165(in Chinese).
|
| [19] |
崔培玲, 杨珊, 李海涛.双框架MSCMG框架伺服系统的动力学解耦及扰动补偿[J].航空学报, 2016, 37(3):916-927. http://www.cnki.com.cn/Article/CJFDTotal-HKXB201603018.htm
CUI P L, YANG S, LI H T.Dynamic decoupling control and disturbance compensation of gimbal servo system of double gimbal MSCMG[J].Acta Aeronautica et Astronautica Sinica, 2016, 37(3):916-927(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-HKXB201603018.htm
|
| [20] |
GAO Z.Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the 2003 American Control Conference.Piscataway: IEEE Press, 2003: 4989-4996.
|
| [21] |
ZHENG Q, DONG L, LEE D H, et al.Active disturbance rejection control for MEMS gyroscopes[J].IEEE Transactions on Control Systems Technology, 2009, 17(6):1432-1438.
|
Figures(12) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: