| Citation: | LI Shuanglin, HE Jiahao, AO Haiyue, et al. Real-time obstacle avoidance algorithm based on pigeon-inspired optimization[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 359-365. doi: 10.13700/j.bh.1001-5965.2020.0198(in Chinese)

|
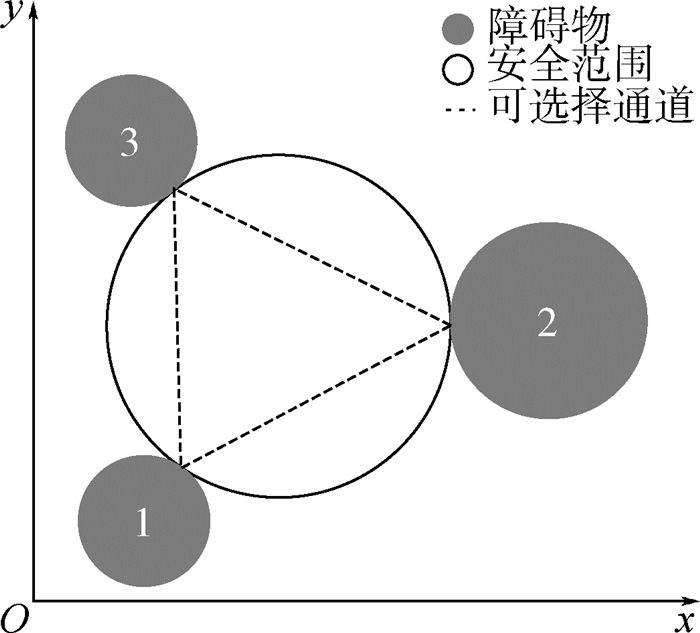
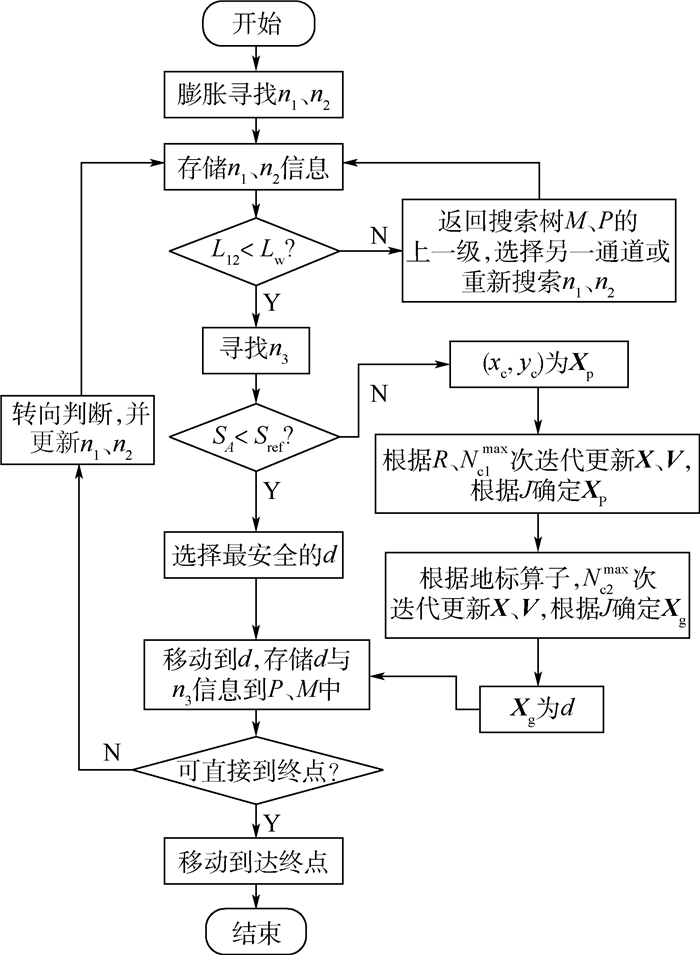
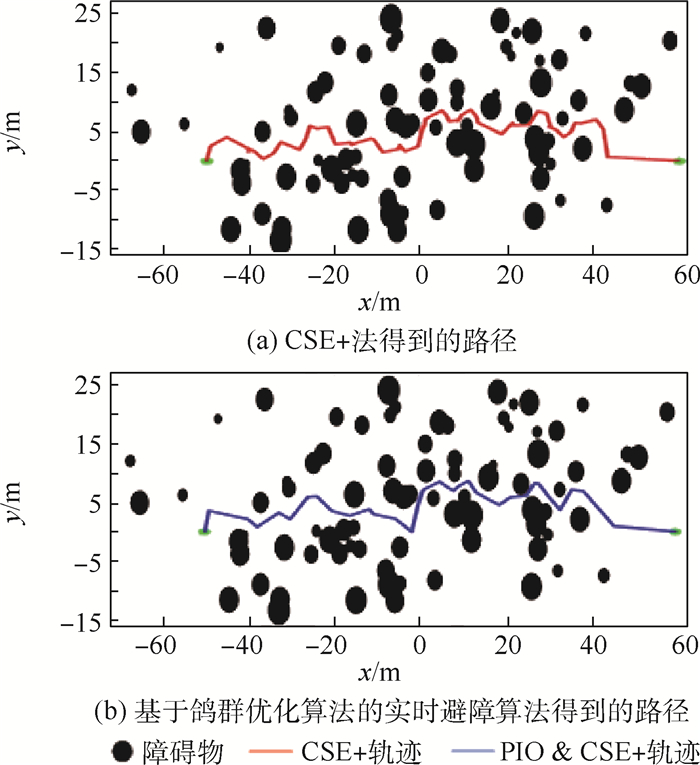
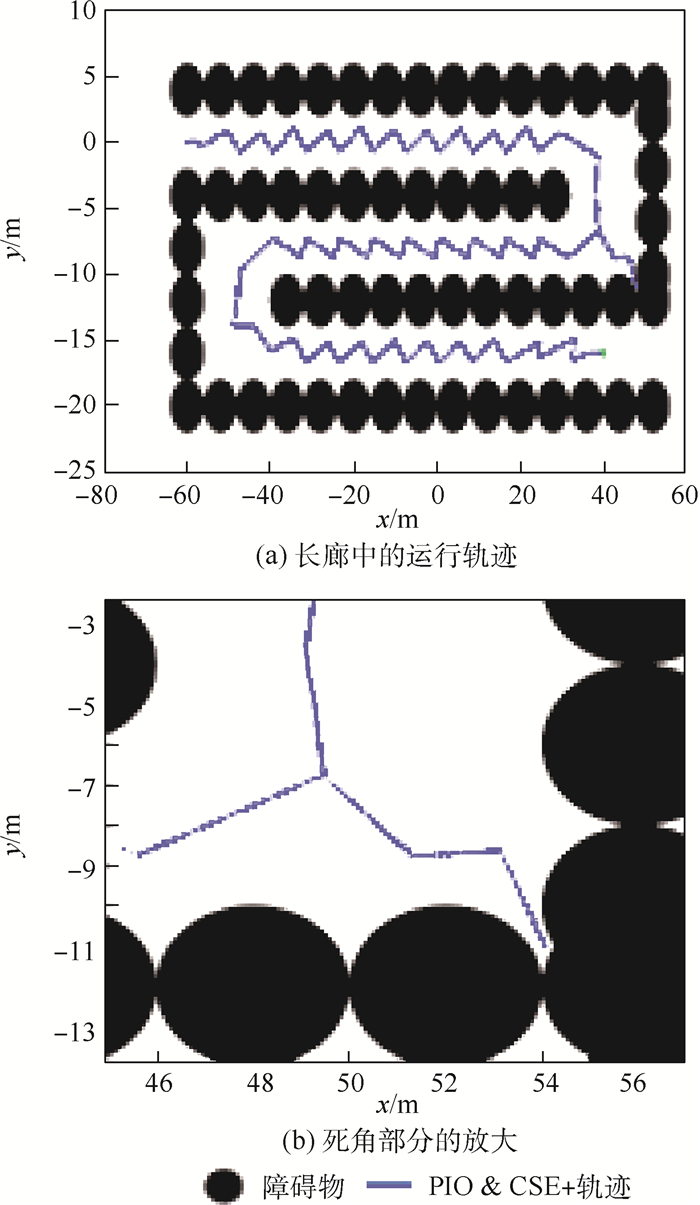
In order to ensure that the mobile robot can reach the target position without collisions, this paper proposes a real-time obstacle avoidance algorithm that integrates the pigeon-inspired optimization into the Circle Sector Expansion plus (CSE+) method. This algorithm includes a judgment mechanism to evaluate the distribution of obstacles. When the obstacles are densely distributed, the safest path will be selected. Otherwise, the pigeon-inspired optimization will be used to find an optimal position as the next target position in the safe range. In addition, a search tree is used to detect and avoid the dead-end situation. The simulation results show that this algorithm can improve the efficiency of path planning, the effect is more obvious when the obstacles are sparsely distributed, the dead-end situation can be detected, and the robot can pass through the narrow and long corridors.

| [1] |
VILSON G, ANGALID K.Spatial and reactive navigation for an autonomous vehicle in an unknown environment[D].Sweden: Umeå Universitet, 2011.
|
| [2] |
RÖNNBÄCK S, WESTERBERG S, PROROK K.CSE+: Path planning amid circles, 2009[C]//The 4th International Conference on Autonomous Robots and Agents.Piscataway: IEEE Press, 2009: 447-452.
|
| [3] |
王海群, 王水满, 张怡. 基于激光雷达信息的无人机避障控制研究[J]. 激光杂志, 2019, 40(12): 76-79. https://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ201912017.htm
WANG H Q, WANG S M, ZHANG Y. Control of UAV barrier avoidance based on lidar information[J]. Laser Journal, 2019, 40(12): 76-79(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JGZZ201912017.htm
|
| [4] |
AZIMIRAD V, SHORAKAEI H. Dual hierarchical genetic-optimal control: A new global optimal path planning method for robots[J]. Journal of Manufacturing Systems, 2014, 33(1): 139-148. doi: 10.1016/j.jmsy.2013.09.006
|
| [5] |
MAC T T, COPOT C, TRAN D T, et al. A hierarchical global path planning approach for mobile robots based on multi-objective particle swarm optimization[J]. Applied Soft Computing, 2017, 59: 68-76. doi: 10.1016/j.asoc.2017.05.012
|
| [6] |
王雷, 李明. 改进自适应遗传算法在移动机器人路径规划中的应用[J]. 南京理工大学学报(自然科学版), 2017, 41(5): 627-633. https://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201705015.htm
WANG L, LI M. Application of improved adaptive genetic algorithm in mobile robot path planning[J]. Journal of Nanjing University of Science and Technology(Natural Sciences), 2017, 41(5): 627-633(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-NJLG201705015.htm
|
| [7] |
魏彤, 龙琛. 基于改进遗传算法的移动机器人路径规划[J]. 北京航空航天大学学报, 2020, 46(4): 703-711. doi: 10.13700/j.bh.1001-5965.2019.0298
WEI T, LONG C. Path planning for mobile robot based on improved genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0298
|
| [8] |
王雄奇, 柯艳国, 吴贤斌, 等. 基于虚拟墙的移动机器人路径跟踪与实时避障方法[J]. 机械与电子, 2019, 37(11): 76-80. https://www.cnki.com.cn/Article/CJFDTOTAL-JXYD201911018.htm
WANG X Q, KE Y G, WU X B, et al. A virtual wall-based path tracking and obstacle avoidance method for mobile robot[J]. Machinery & Electronics, 2019, 37(11): 76-80(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXYD201911018.htm
|
| [9] |
ROSTAMI S M H, SANGAIAH A K, WANG J, et al. Obstacle avoidance of mobile robots using modified artificial potential field algorithm[J]. EURASIP Journal on Wireless Communications and Networking, 2019, 2019(1): 70. doi: 10.1186/s13638-019-1396-2
|
| [10] |
张宁, 李彩虹, 郭娜, 等. 基于CM-Q学习的自主移动机器人局部路径规划[J]. 山东理工大学学报(自然科学版), 2020, 34(4): 37-43. https://www.cnki.com.cn/Article/CJFDTOTAL-SDGC202004007.htm
ZHANG N, LI C H, GUO N, et al. Local path planning of autonomous mobile robot based on CM-Q learning[J]. Journal of Shandong University of Technology (Natural Science Edition), 2020, 34(4): 37-43(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SDGC202004007.htm
|
| [11] |
高乐, 马天录, 刘凯, 等. 改进Q-Learning算法在路径规划中的应用[J]. 吉林大学学报(信息科学版), 2018, 36(4): 439-443. https://www.cnki.com.cn/Article/CJFDTOTAL-CCYD201804013.htm
GAO L, MA T L, LIU K, et al. Application of improved Q-Learning algorithm in path planning[J]. Journal of Jilin University (Information Science Edition), 2018, 36(4): 439-443(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CCYD201804013.htm
|
| [12] |
LOW E S, ONG P, CHEAH K C. Solving the optimal path planning of a mobile robot using improved Q-learning[J]. Robotics and Autonomous Systems, 2019, 115: 143-161. doi: 10.1016/j.robot.2019.02.013
|
| [13] |
魏立新, 吴绍坤, 孙浩, 等. 基于多行为的移动机器人路径规划[J]. 控制与决策, 2019, 34(12): 2721-2726. https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201912030.htm
WEI L X, WU S K, SUN H, et al. Mobile robot path planning based on multi-behaviors[J]. Control and Decision, 2019, 34(12): 2721-2726(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201912030.htm
|
| [14] |
郭娜, 李彩虹, 王迪, 等. 基于模糊控制的移动机器人局部路径规划[J]. 山东理工大学学报(自然科学版), 2020, 34(4): 24-29. https://www.cnki.com.cn/Article/CJFDTOTAL-SDGC202004005.htm
GUO N, LI C H, WANG D, et al. Local path planning of mobile robot based on fuzzy control[J]. Journal of Shandong University of Technology (Natural Science Edition), 2020, 34(4): 24-29(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-SDGC202004005.htm
|
| [15] |
BORENSTEIN J, KOREN Y. The vector field histogram-fast obstacle avoidance for mobile robots[J]. IEEE Transactions on Robotics and Automation, 1991, 7(3): 278-288. doi: 10.1109/70.88137
|
| [16] |
ULRICH I, BORENSTEIN J.VFH*: Local obstacle avoidance with look-ahead verification[C]//IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2000: 2505-2511.
|
| [17] |
ULRICH I, BORENSTEIN J.VFH+: Reliable obstacle avoidance for fast mobile robots[C]//IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 1998: 1572-1577.
|
| [18] |
江超, 邢科新, 林叶贵, 等. 未知环境下移动机器人静态与动态实时避障方法研究[J]. 高技术通讯, 2019, 29(10): 1012-1020. https://www.cnki.com.cn/Article/CJFDTOTAL-GJSX201910010.htm
JIANG C, XING K X, LIN Y G, et al. Research on static and dynamic real-time obstacle avoidance methods for mobile robots in unknown environment[J]. Chinese High Technology Letters, 2019, 29(10): 1012-1020(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GJSX201910010.htm
|
| [19] |
张帅, 李学仁, 张鹏, 等. 基于人机合作的无人机实时航迹规划[J]. 北京航空航天大学学报, 2017, 43(4): 814-822. doi: 10.13700/j.bh.1001-5965.2016.0271
ZHANG S, LI X R, ZHANG P, et al. UAV real-time path planning based on human-machine cooperation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(4): 814-822(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0271
|
| [20] |
RÖNNBÄCK S, BERGLUND T, FREDRIKSSON H, et al.Circle sector expansions for on-line exploration[C]//IEEE International Conference on Robotics and Biomimetics.Piscataway: IEEE Press, 2006: 1227-1232.
|
| [21] |
DUAN H B, QIAO P X. Pigeon-inspired optimization: A new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7: 24-37. doi: 10.1108/IJICC-02-2014-0005
|
| [22] |
CHEN B, LEI H, SHEN H, et al. A hybrid quantum-based PIO algorithm for global numerical optimization[J]. Science China Information Sciences, 2019, 62(7): 33-44. doi: 10.1007/s11432-018-9546-4
|
| [23] |
胡耀龙, 冯强, 海星朔, 等. 基于自适应学习策略的改进鸽群优化算法[J]. 北京航空航天大学学报, 2020, 46(12): 2348-2356. doi: 10.13700/j.bh.1001-5965.2019.0603
HU Y L, FENG Q, HAI X S, et al. Improved pigeon-inspired optimization algorithm based on adaptive learningstrategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(12): 2348-2356(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0603
|
| [24] |
张亚平, 孙佩华, 李昱辉, 等. 基于改进鸽群优化算法的高超声速飞行器轨迹优化[J]. 飞行力学, 2017, 35(4): 60-64. https://www.cnki.com.cn/Article/CJFDTOTAL-FHLX201704014.htm
ZHANG Y P, SUN P H, LI Y H, et al. Hypersonic vehicle trajectory optimization based on improved pigeon-inspired optimization algorithm[J]. Flight Dynamics, 2017, 35(4): 60-64(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FHLX201704014.htm
|

Figures(7) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: