| Citation: | MA Ziyuan, GONG Huajun, WANG Xinhuaet al. Trajectory planning of unmanned helicopter formation based on improved artificial fish swarm algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 406-413. doi: 10.13700/j.bh.1001-5965.2020.0203(in Chinese)

|
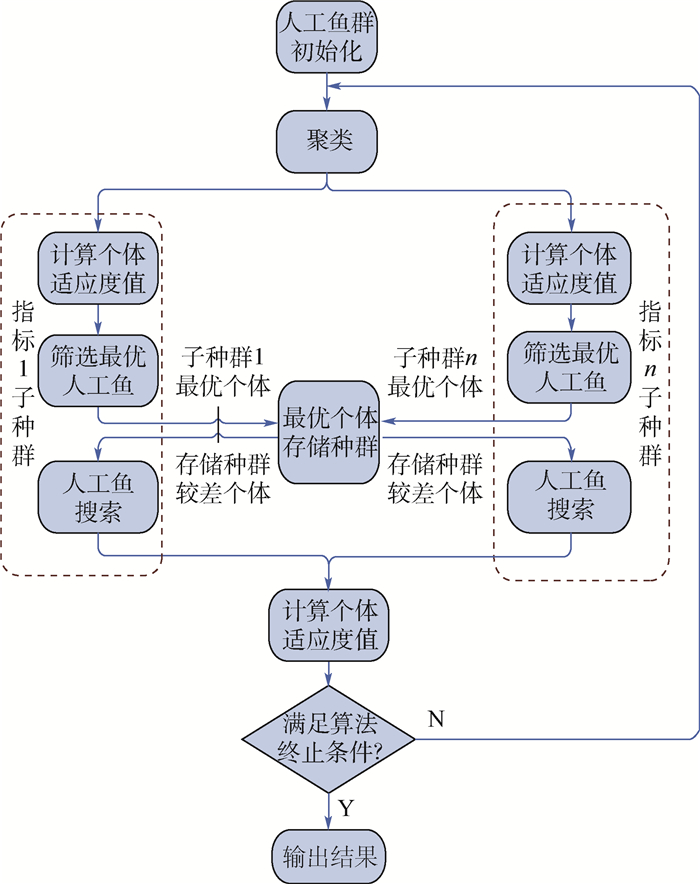
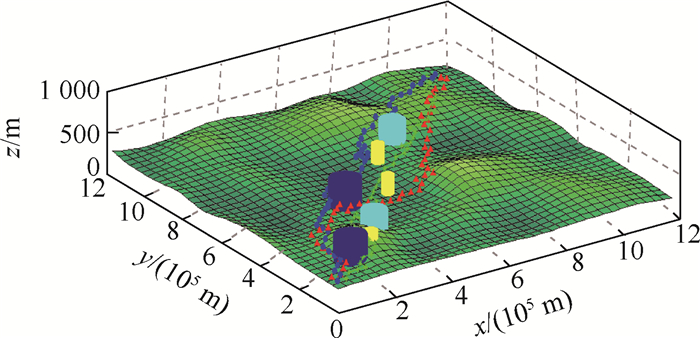
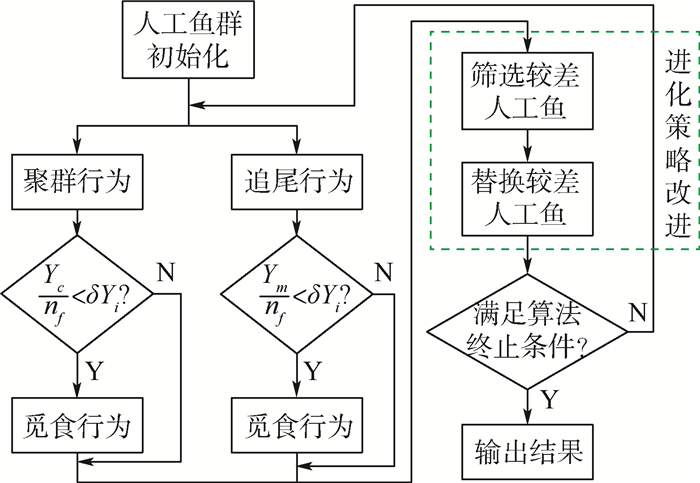
To solve formation path planning problem of the Unmanned Helicopter (UH), a path planning algorithm is proposed based on improved Artificial Fish Swarm Algorithm (AFSA). An adaptive vision model of artificial fish for artificial fish swarm algorithm was put forward from two aspects of neighborhood learning and algorithm characteristics. The evolutionary strategy of fish swarm was improved on the basis of asexual reproduction. The trajectory planning model of unmanned helicopter formation was established from three aspects of planning principle, cost function and constraint conditions. The coding method and clustering strategy were improved in order to solve low searching efficiency and poor accuracy problems in route planning. An example of three-aircraft formation path planning was used to verify the proposed method. Simulation results indicate that, through the improvement of AFSA, the establishment of trajectory planning model and other measures, good unmanned helicopter formation path planning can be achieved, and meanwhile the search efficiency, convergence velocity and solution accuracy are improved significantly.

| [1] |
朱黔, 周锐. 具有持续侦察时间约束的协同航路规划[J]. 北京航空航天大学学报, 2016, 42(10): 2130-2138. doi: 10.13700/j.bh.1001-5965.2015.0613
ZHU Q, ZHOU R. Cooperative path planning with reconnaissance duration time constraints[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(10): 2130-2138(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0613
|
| [2] |
喻俊松, 王琪, 徐蓉瑞. 基于改进人工鱼群算法的无人机路径规划[J]. 弹箭与制导学报, 2015, 35(3): 37-40. https://www.cnki.com.cn/Article/CJFDTOTAL-DJZD201503010.htm
YU J S, WANG Q, XU R R. UAV path planning based on improved artificial fish swarm algorithm[J]. Journal of Missile and Guidance, 2015, 35(3): 37-40(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DJZD201503010.htm
|
| [3] |
高晔, 周军, 谢亚恩, 等. 多无人机编队突发威胁规避路径规划算法[J]. 哈尔滨工程大学学报, 2019, 40(12): 2036-2043. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201912015.htm
GAO Y, ZHOU J, XIE Y E, et al. Path planning algorithm for multi UAV formation threat avoidance[J]. Journal of Harbin Engineering University, 2019, 40(12): 2036-2043(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBG201912015.htm
|
| [4] |
徐钊, 胡劲文, 马云红, 等. 无人机碰撞规避路径规划算法研究[J]. 西北工业大学学报, 2019, 37(1): 100-106. https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201901015.htm
XU Z, HU J W, MA Y H, et al. Research on collision avoidance path planning algorithm of UAV[J]. Journal of Northwest University of Technology, 2019, 37(1): 100-106(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XBGD201901015.htm
|
| [5] |
周德云, 王鹏飞, 李枭扬, 等. 基于多目标优化算法的多无人机协同航迹规划[J]. 系统工程与电子技术, 2017, 39(4): 782-787. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201704013.htm
ZHOU D Y, WANG P F, LI X Y, et al. Cooperative path plan-ning of multi-UAV based on multi-objective optimization algorithm[J]. Systems Engineering and Electronics, 2017, 39(4): 782-787(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201704013.htm
|
| [6] |
吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2020(2020-05-06)[2020-07-02].
https: //www.cnki.net/kcms/detail/11.2625.V.20200506.1327.003.html. WU A, YANG R N, LIANG X L, et al.Cooperative search algorithm based on pheromone decision for UAV swarm[J].Journal of Beijing University of Aeronautics and Astronautics, 2020(2020-05-06)[2020-07-02].https: //www.cnki.net/kcms/detail/11.2625.V.20200506.1327.003.html (in Chinese).
|
| [7] |
程泽新, 李东生, 高杨. 一种改进遗传算法的无人机航迹规划[J]. 计算机仿真, 2019, 36(12): 31-35. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201912007.htm
CHENG Z X, LI D S, GAO Y. GASA drone path planning to improve mutation strategy[J]. Computer Simulation, 2019, 36(12): 31-35(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201912007.htm
|
| [8] |
程晓明. 无人机双机协同航迹规划技术研究[D]. 南京: 南京航空航天大学, 2015.
CHENG X M.Research on cooperative path planning technology of UAV dual aircraft[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2015(in Chinese).
|
| [9] |
于鸿达, 王从庆, 贾峰, 等. 一种基于差分进化混合粒子群算法的多无人机航迹规划[J]. 电光与控制, 2018, 25(5): 22-25. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201805006.htm
YU H D, WANG C Q, JIA F, et al. Path planning for multiple UAVs based on hybrid particle swarm optimization with differential evolution[J]. Electronics Optics & Control, 2018, 25(5): 22-25(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201805006.htm
|
| [10] |
赵克新, 黄长强, 王渊, 等. 基于混沌蚁狮算法的无人机航迹规划[J]. 飞行力学, 2018, 36(1): 93-96. https://www.cnki.com.cn/Article/CJFDTOTAL-FHLX201801022.htm
ZHAO K X, HUANG C Q, WANG Y, et al. UAV path planning based on chaos ant lion algorithm[J]. Flight Dynamics, 2018, 36(1): 93-96(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FHLX201801022.htm
|
| [11] |
范伟伦, 李薇, 冯杭. 基于改进RRT算法的无人机实时航迹规划[J]. 舰船电子工程, 2019, 39(2): 56-60. https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201902015.htm
FAN W L, LI W, FENG H. UAV trajectory planning based on an improved RRT algorithm[J]. Ship Electronic Engineering, 2019, 39(2): 56-60(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JCGC201902015.htm
|
| [12] |
WEN N, SU X, MA P, et al. Online UAV path planning in uncertain and hostile environments[J]. International Journal of Machine Learning and Cybernetics, 2015, 8(2): 1-19. doi: 10.1007/s13042-015-0339-4
|
| [13] |
白瑞光, 孙鑫, 陈秋双, 等. 基于Gauss伪谱法的多UAV协同航迹规划[J]. 宇航学报, 2014, 35(9): 1022-1029. https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201409007.htm
BAI R G, SUN X, CHEN Q S, et al. Multiple UAV cooperative trajectory planning based on Gauss pseudospectral method[J]. Journal of Astronautics, 2014, 35(9): 1022-1029(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201409007.htm
|
| [14] |
晏青, 熊峻江, 游思明. 基于动态RCS的无人机航迹实时规划[J]. 北京航空航天大学学报, 2011, 37(9): 1115-1121. https://bhxb.buaa.edu.cn/CN/Y2011/V37/I9/1115
YAN Q, XIONG J J, YOU S M. Real-time programming method for flight path of unmanned vehicle based on dynamic RCS[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(9): 1115-1121(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2011/V37/I9/1115
|
| [15] |
李晓磊, 邵之江, 钱积新. 一种基于动物自治体的寻优模式: 鱼群算法[J]. 系统工程理论与实践, 2002, 22(11): 32-38. https://www.cnki.com.cn/Article/CJFDTOTAL-XTLL200211006.htm
LI X L, SHAO Z J, QIAN J X. An optimizing method based on autonomous animats: Fish-swarm algorithm[J]. Systems Engineering-Theory & Practice, 2002, 22(11): 32-38(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTLL200211006.htm
|
| [16] |
JIANG M Y, MASTORAKIS N E, YUAN D F, et al.Multi-threshold image segmentation with improved artificial fish swarm algorithm[C]//Proceedings of the European Computing Conference (ECC2009).Berlin: Springer, 2009: 133-138.
|
| [17] |
YAO Z G, REN Z H. Path planning for coalmine rescue robot based on hybrid adaptive artificial fish swarm algorithm[J]. International Journal of Control and Automation, 2014, 7(8): 1-12. doi: 10.14257/ijca.2014.7.8.01
|
| [18] |
BREAD R W, MCLAIN T W, GOODRICH M A, et al.Coordinated target assignment and intercept for unmanned air vehicles[C]//Proceedings of IEEE Transactions on Robotics and Automation.Piscataway: IEEE Press, 2002: 911-922.
|
| [19] |
LU J S, WANG N, CHEN J. Cooperative path planning for multiple UHs using an AIS-ACO hybrid approach[C]//2011 International Conference on Electronic and Mechanical Engineering and Information Technology.Piscataway: IEEE Press, 2011: 4301-4305.
|
| [20] |
KEIKHA M M. Improved simulated annealing using momentum terms[C]//2011 IEEE Second International Conference on Intelligent Systems, Modeling and Simulation. Piscataway: IEEE Press, 2011: 44-48.
|
| [21] |
周瑞, 黄长强, 魏政磊, 等. MP-GWO算法在多UCAV协同航迹规划中的应用[J]. 空军工程大学学报(自然科学版), 2017, 18(5): 24-29. https://www.cnki.com.cn/Article/CJFDTOTAL-KJGC201705005.htm
ZHOU R, HUANG C Q, WEI Z L, et al. Application of MP-GWO algorithm in multi UCAV coordinated track planning[J]. Journal of Air Force Engineering University (Natural Science Edition), 2017, 18(5): 24-29(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KJGC201705005.htm
|
Figures(6) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: