| Citation: | ZHOU Zhangyong, SHAO Shuyi, HU Weiet al. High-g maneuver dynamic surface control of fighter plane under input saturation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 247-254. doi: 10.13700/j.bh.1001-5965.2020.0209(in Chinese)

|
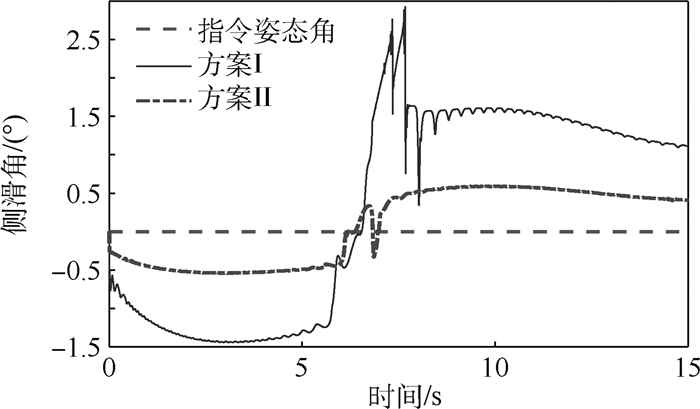
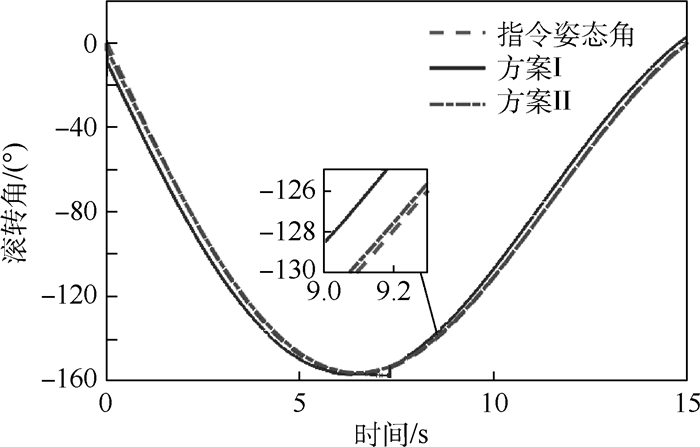
An adaptive neural network dynamic surface control method is proposed to resolve the input saturation problem of aircraft high-

| [1] |
BRINKER J, WISE K. Stability and flying qualities robustness of a dynamic inversion aircraft control law[J]. Journal of Guidance, Control, and Dynamics, 1996, 19(6): 1270-1277. doi: 10.2514/3.21782
|
| [2] |
龙晋伟, 潘文俊, 王立新, 等. 基于任务评定的战斗机大迎角飞行控制律设计方法[J]. 北京航空航天大学学报, 2014, 40(6): 844-848. doi: 10.13700/j.bh.1001-5965.2013.0436
LONG J W, PAN W J, WANG L X, et al. Design approach of nonlinear flight control law for fighter at high angle-of-attack based on mission[J]. Journal of Beijing University of Aeronautics and Astronautics, 2014, 40(6): 844-848(in Chinese). doi: 10.13700/j.bh.1001-5965.2013.0436
|
| [3] |
孙勇, 章卫国, 章萌. 基于神经网络的反步自适应大机动飞行控制[J]. 系统工程与电子技术, 2011, 33(5): 1113-1117. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201105034.htm
SUN Y, ZHANG W G, ZHANG M. Backstepping adaptive high maneuvers flight control based on neural network[J]. Systems Engineering and Electronics, 2011, 33(5): 1113-1117(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201105034.htm
|
| [4] |
虞江航, 徐军, 黄雨可. 一类反馈型非线性系统的跟踪控制[J]. 北京航空航天大学学报, 2019, 45(7): 1444-1450. doi: 10.13700/j.bh.1001-5965.2018.0688
YU J H, XU J, HUANG Y K. Tracking control for a class of nonlinear systems in feedback form[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(7): 1444-1450(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0688
|
| [5] |
冯福沁, 张胜修, 曹立佳, 等. 基于RBF神经网络的自适应反演大机动飞行控制器设计[J]. 电光与控制, 2013, 20(5): 63-68. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201305016.htm
FENG F Q, ZHANG S X, CAO L J, et al. Design of adaptive backstepping controller for high maneuvering flight based on RBF neural network[J]. Electronics Optics & Control, 2013, 20(5): 63-68(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201305016.htm
|
| [6] |
张凯, 杨锁昌, 张宽桥, 等. 考虑导弹自动驾驶仪动态特性的新型制导律[J]. 北京航空航天大学学报, 2017, 43(8): 1693-1704. doi: 10.13700/j.bh.1001-5965.2016.0630
ZHANG K, YANG S C, ZHANG K Q, et al. Novel guidance law accounting for dynamics of missile autopilot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(8): 1693-1704(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0630
|
| [7] |
陈谋, 姜长生, 吴庆宪. 基于干扰观测器的一类不确定非线性系统鲁棒H∞控制[J]. 控制理论与应用, 2006, 23(4): 611-614. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200604023.htm
CHEN M, JIANG C S, WU Q X. Robust H-infinity control for a class of nonlinear uncertain systems with disturbance observer[J]. Control Theory & Applications, 2006, 23(4): 611-614(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200604023.htm
|
| [8] |
CHEN M, GE S S. Direct adaptive neural control for a class of uncertain nonaffine nonlinear systems based on disturbance observer[J]. IEEE Transactions on Cybernetics, 2013, 43(4): 1213-1225. doi: 10.1109/TSMCB.2012.2226577
|
| [9] |
李静, 左斌, 段洣毅, 等. 输入受限的吸气式高超声速飞行器自适应Terminal滑模控制[J]. 航空学报, 2012, 33(2): 220-233. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201202005.htm
LI J, ZUO B, DUAN M Y, et al. Adaptive Terminal sliding mode control for air-breathing hypersonic vehicles under control input constraints[J] Acta Aeronautica et Astronautica Sinica, 2012, 33(2): 220-233(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201202005.htm
|
| [10] |
陈龙胜, 王琦. 输入受限的非仿射纯反馈不确定系统自适应动态面容错控制[J]. 控制理论与应用, 2016, 33(2): 221-227. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201602011.htm
CHEN L S, WANG Q. Adaptive dynamic surface fault-tolerant control for uncertain non-affine pure feedback systems with input constraint[J]. Control Theory & Applications, 2016, 33(2): 221-227(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201602011.htm
|
| [11] |
YOO S J, PARK J B, CHOI Y H. Adaptive dynamic surface control of flexible-joint robots using self-recurrent wavelet neural networks[J]. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, 2006, 36(6): 1342-1355. doi: 10.1109/TSMCB.2006.875869
|
| [12] |
VAN OORT E R, SONNEVELDT L, CHU Q P, et al.A comparison of adaptive nonlinear control designs for an over-actuated fighter aircraft model: AIAA-2008-6786[R]. Reston: AIAA, 2008.
|
| [13] |
LIU Z C, DONG X M, XIE W J, et al. Adaptive fuzzy control for pure-feedback nonlinear systems with non-affine functions being semi-bounded and in-differentiable[J]. IEEE Transactions on Fuzzy Systems, 2018, 26(2): 395-408. doi: 10.1109/TFUZZ.2017.2666422
|
| [14] |
左仁伟, 董新民, 刘棕成. 纯反馈非线性系统的鲁棒自适应跟踪控制[J]. 电光与控制, 2018, 25(10): 17-23. https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201810005.htm
ZUO R W, DONG X M, LIU Z C. Robust adaptive tracking control for pure-feedback nonlinear systems[J]. Electronics Optics & Control, 2018, 25(10): 17-23(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DGKQ201810005.htm
|
| [15] |
CUI B, XIA Y Q, LIU K, et al. Finite-time tracking control for a class of uncertain strict-feedback nonlinear systems with state constraints: A smooth control approach[J]. IEEE Transactions on Neural Networks and Learning Systems, 2020, 31(11): 4920-4932. doi: 10.1109/TNNLS.2019.2959016
|
| [16] |
XU B, SHOU Y X, LUO J, et al. Neural learning control of strict-feedback systems using disturbance observer[J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(5): 1269-1307. http://www.ncbi.nlm.nih.gov/pubmed/30222586
|
| [17] |
BU X W, XIAO Y, LEI H M. An adaptive critic design-based fuzzy neural controller for hypersonic vehicles: Predefined behavioral nonaffine control[J]. IEEE/ASME Transactions on Mechatronics, 2019, 24(4): 1871-1881. doi: 10.1109/TMECH.2019.2928699
|
| [18] |
YAN X, CHEN M, FENG G, et al. Fuzzy robust constrained control for nonlinear systems with input saturation and external disturbances[J]. IEEE Transactions on Fuzzy Systems, 2019, 99: 1. http://www.researchgate.net/publication/337174367_Fuzzy_Robust_Constrained_Control_for_Nonlinear_Systems_with_Input_Saturation_and_External_Disturbances
|
Figures(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: