| Citation: | XU Lihao, ZHANG Yu, XU Binet al. Maneuvering flight control of QUAV based on bi-directional motor actuation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 373-381. doi: 10.13700/j.bh.1001-5965.2020.0221(in Chinese)

|
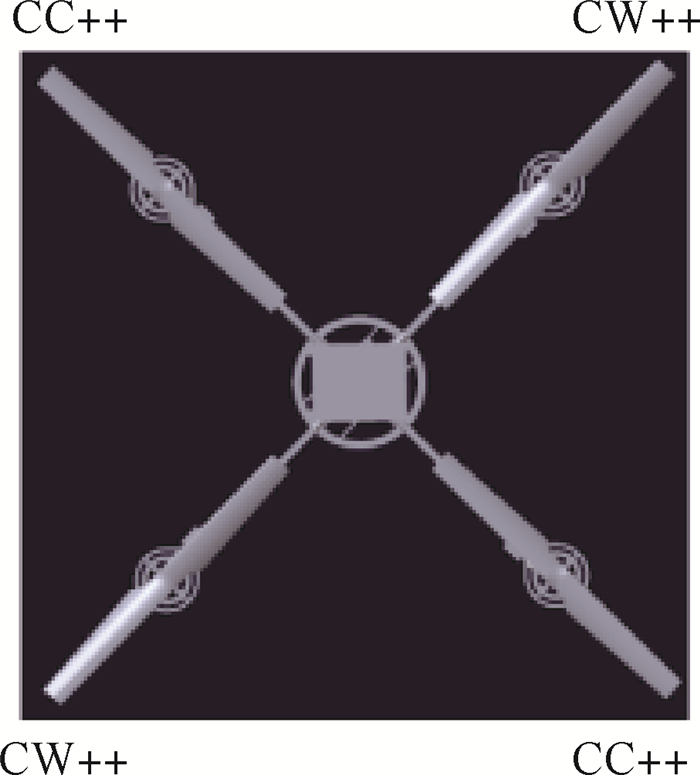
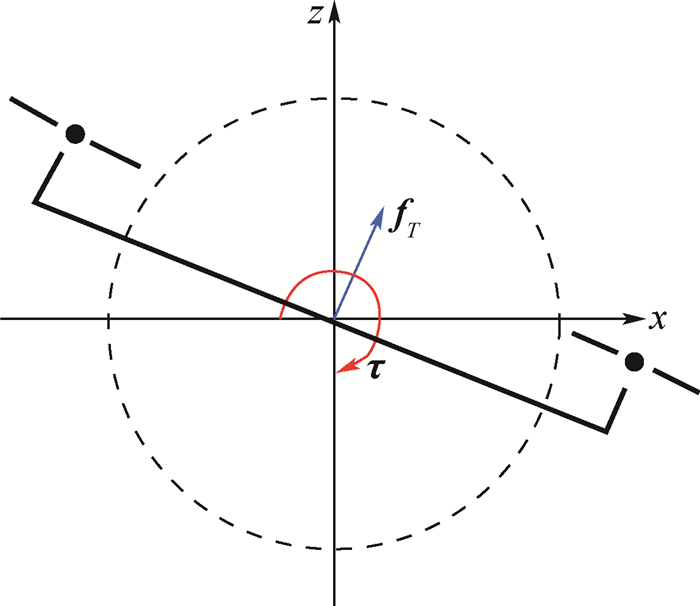
The position and attitude control of Quadrotor Unmanned Aerial Vehicle (QUAV) determines its maneuverability. First, to overcome the mobility defect of the under-actuated system, the dynamic model of bi-directional-motor-driven QUAV based on quaternion is presented, including the analysis on omnidirectional movement process. The attitude and position controllers and QUAV's control allocation matrix are illustrated. Then, considering the vertical

| [1] |
CUTLER M, HOW J P. Analysis and control of a variable-pitch quadrotor for agile flight[J]. Journal of Dynamic Systems, Measurement, and Control, 2015, 137(10): 101002. doi: 10.1115/1.4030676
|
| [2] |
GUPTA N, KOTHARI M.Flight dynamics and nonlinear control design for variable-pitch quadrotors[C]//2016 American Control Conference.Piscataway: IEEE Press, 2016: 3150-3155.
|
| [3] |
PAULOS J, YIM M.Flight performance of a swashplateless micro air vehicle[C]//2015 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2015: 5284-5289.
|
| [4] |
PAULOS J, YIM M. Cyclic blade pitch control without a swashplate for small helicopter[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(3): 689-700. doi: 10.2514/1.G002683
|
| [5] |
BRESCIANINI D, D'ANDREA R.Design, modeling and control of an omni-directional aerial vehicle[C]//2016 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2016: 3261-3266.
|
| [6] |
JIANG G, VOYLES R.Hexrotor UAV platform enabling dextrous interaction with structures-flight test[C]//2013 IEEE International Symposium on Safety, Security, and Rescue Robotics.Piscataway: IEEE Press, 2013: 14046745.
|
| [7] |
RYLL M. 6D interaction control with aerial robots: The flying end-effector paradigm[J]. International Journal of Robotics Research, 2019, 38(9): 1045-1062. doi: 10.1177/0278364919856694
|
| [8] |
TOMIC T, OTT C, HADDADIN S. External wrench estimation, collision detection, and reflex reaction for flying robots[J]. IEEE Transactions on Robotics, 2017, 33(6): 1467-1482. doi: 10.1109/TRO.2017.2750703
|
| [9] |
KUIPERS J.Quaternions and rotation sequences: A primer with applications to orbits, aerospace, and virtual reality[M].[S.l.]: Princeton University Press, 2002.
|
| [10] |
LUPASHIN S, SCHOELLIG A, SHERBACK M, et al.A simple learning strategy for high-specd quadrocopter multi-flips[C]//International Conference on Robotics and Automation.Piscataway: IEEE Press, 2010: 1642-1648.
|
| [11] |
FAESSLER M, FRANCHI A, SCARAMUZZA D. Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 620-626. doi: 10.1109/LRA.2017.2776353
|
| [12] |
YU Y, YANG S, WANG M, et al.High performance full attitude control of a quadrotor on SO(3)[C]//2015 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2015: 1698-1703.
|
| [13] |
HAMEL T, MAHONY R.Dynamic modelling and configuration stabilization for an x4-flyer[C]//15th Triennial World Congress, 2002: 217-222.
|
| [14] |
GILLULA J, HUANG H, VITUS M, et al.Design of guaranteed safe maneuvers using reachable sets: Autonomous quadrotor aerobatics in theory and practice[C]//2010 IEEE International Conference on Robotics and Automation.Piscataway: IEEE Press, 2010: 1649-1654.
|
| [15] |
DARBY C, HAGER W, RAO A. An hp-adaptive pseudospectral method for solving optimal control problems[J]. Optimal Control Applications and Methods, 2010, 32(4): 476-502. doi: 10.1002/oca.957
|

Figures(11) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: