| Citation: | ZHANG Ling, DUAN Haibin, YONG Ting, et al. Unmanned aerial vehicle swarm formation control based on paired interaction mechanism in jackdaws[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(2): 391-397. doi: 10.13700/j.bh.1001-5965.2020.0265(in Chinese)

|
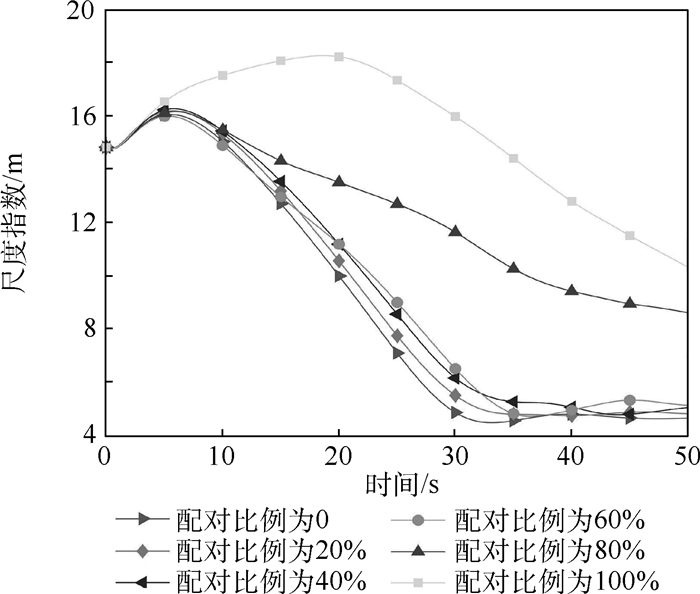
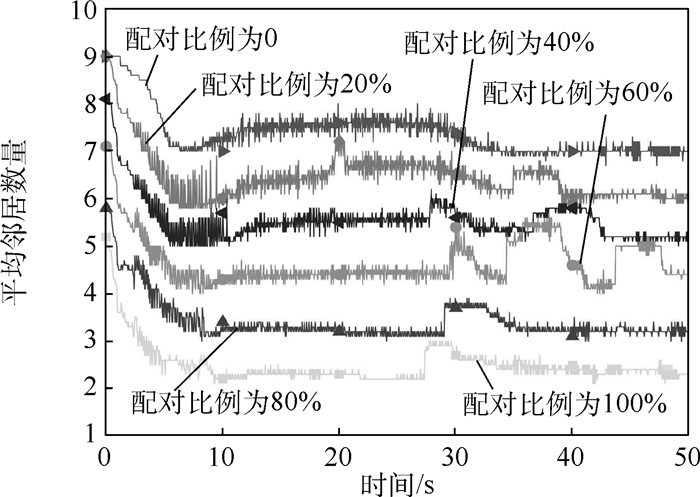
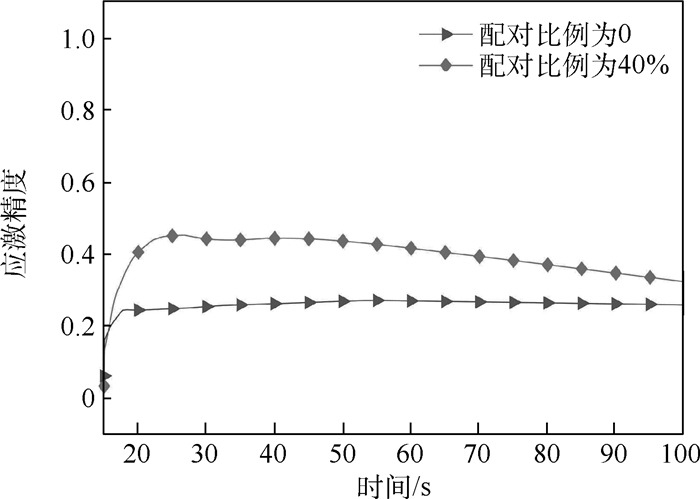
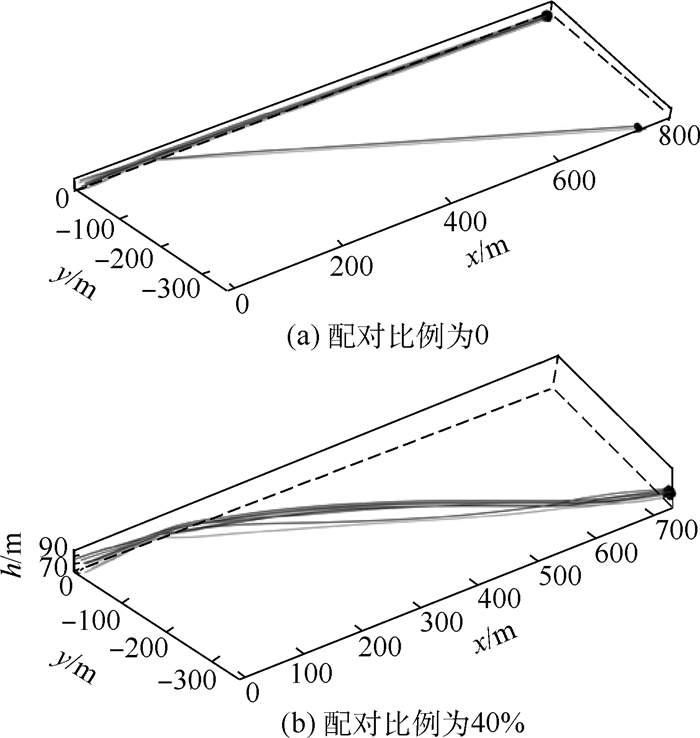
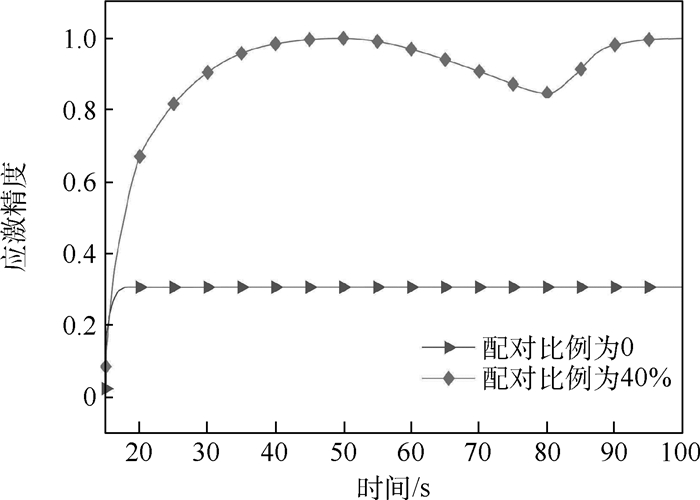
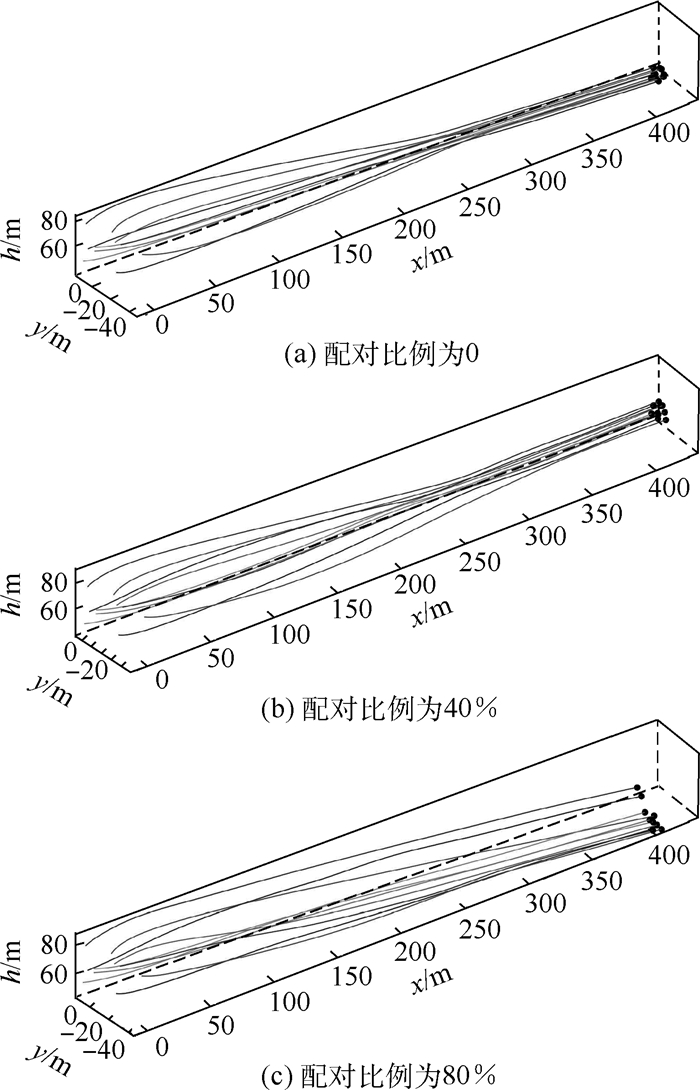
Inspired by the paired flight mechanism of jackdaws, a paired interactive swarm model is proposed and applied to the Unmanned Aerial Vehicle (UAV) swarm control system. Firstly, by imitating the paired interaction between jackdaw individuals, the neighbor selection mechanism is designed in pairing interaction. Considering inertial acceleration, long-range attraction, close-range repulsion, speed matching and motion damping, the paired and unpaired individual's differential equation of kinematics is established based on the social forces. Then the construction of the paired interaction model is completed. Secondly, based on the UAV control model, a UAV swarm controller in paired interaction mechanism is designed. Finally, two sets of simulation experiments are conducted to study the characteristics of the model proposed when it is used on the UAV swarm. Simulation results show that the paired interaction model can ensure the consistency of the UAV swarm. The communication load of the UAVs can be reduced by less average number of neighbors in UAV interaction. The UAV swarm has higher stimulation accuracy if the paired UAV is taken as the information individual when facing external stimuli.

| [1] |
KARIMODDINI A, LIN H, CHEN B M, et al. Hybrid three-dimensional formation control for unmanned helicopters[J]. Automatica, 2013, 49(2): 424-433. doi: 10.1016/j.automatica.2012.10.008
|
| [2] |
何吕龙, 张佳强, 侯岳奇, 等. 有向通信拓扑和时延条件下的无人机集群时变编队控制[J]. 北京航空航天大学学报, 2020, 46(2): 314-323. doi: 10.13700/j.bh.1001-5965.2019.0206
HE L L, ZHANG J Q, HOU Y Q, et al. Time-varying formation control for UAV swarm with directed interaction topology and communication delay[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(2): 314-323(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0206
|
| [3] |
马鸣宇, 董朝阳, 王青, 等. 基于事件驱动的多飞行器编队协同控制[J]. 北京航空航天大学学报, 2017, 43(3): 506-515. doi: 10.13700/j.bh.1001-5965.2016.0222
MA M Y, DONG C Y, WANG Q, et al. Event-based cooperative control of multiple flight vehicles formation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(3): 506-515(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0222
|
| [4] |
ROSA M R, BALDI S, WANG X, et al. Adaptive hierarchical formation control for uncertain Euler-Lagrange systems using distributed inverse dynamics[J]. European Journal of Control, 2019, 48: 52-65. doi: 10.1016/j.ejcon.2018.11.001
|
| [5] |
TANNER H G, JADBABAIE A, PAPPAS G J.Stable flocking of mobile agents, Part Ⅰ: Fixed topology[C]//42nd IEEE Conference on Decision and Control.Piscataway: IEEE Press, 2003: 2010-2015.
|
| [6] |
TANNER H G, JADBABAIE A, PAPPAS G J.Stable flocking of mobile agents, Part Ⅱ: Dynamic topology[C]//42nd IEEE Conference on Decision and Control.Piscataway: IEEE Press, 2003: 2016-2021.
|
| [7] |
毛昱天, 陈杰, 方浩, 等. 连通性保持下的多机器人系统分布式集群控制[J]. 控制理论与应用, 2014, 31(10): 1393-1403.
MAO Y T, CHEN J, FANG H, et al. Decentralized flocking of multi-robot systems with connectivity maintenance[J]. Control Theory & Applications, 2014, 31(10): 1393-1403(in Chinese).
|
| [8] |
KELLEY D, OUELLETTE N. Emergent dynamics of laboratory insect swarms[J]. Scientific Reports, 2013, 3: 1073. doi: 10.1038/srep01073
|
| [9] |
GIARDINA I. Collective behavior in animal groups: Theoretical models and empirical studies[J]. HFSP Journal, 2008, 2(4): 205-219. doi: 10.2976/1.2961038
|
| [10] |
ZHANG H T, CHEN Z, VICSEK T, et al. Route-dependent switch between hierarchical and egalitarian strategies in pigeon flocks[J]. Scientific Reports, 2014, 4: 1-7. http://pubmedcentralcanada.ca/pmcc/articles/PMC4108945/
|
| [11] |
COUZIN I D, KRAUSE J, JAMES R, et al. Collective memory and spatial sorting in animal groups[J]. Journal of Theoretical Biology, 2002, 218(1): 1-12. doi: 10.1006/jtbi.2002.3065
|
| [12] |
VICSEK T, CZIRÓK A, BEN-JACOB E, et al. Novel type of phase transition in a system of self-driven particles[J]. Physical Review Letters, 1995, 75(6): 1226. doi: 10.1103/PhysRevLett.75.1226
|
| [13] |
邱华鑫, 段海滨, 范彦铭. 基于鸽群行为机制的多无人机自主编队[J]. 控制理论与应用, 2015, 32(10): 1298-1304. doi: 10.7641/CTA.2015.50314
QIU H X, DUAN H B, FAN Y M. Multiple unmanned aerial vehicle autonomous formation based on the behavior mechanism in pigeon flocks[J]. Control Theory & Applications, 2015, 32(10): 1298-1304(in Chinese). doi: 10.7641/CTA.2015.50314
|
| [14] |
邱华鑫, 段海滨, 范彦铭, 等. 鸽群交互模式切换模型及其同步性分析[J]. 智能系统学报, 2020, 15(2): 334-343.
QIU H X, DUAN H B, FAN Y M, et al. Pigeon flock interaction pattern switching model and its synchronization analysis[J]. CAAI Transactions on Intelligent Systems, 2020, 15(2): 334-343(in Chinese).
|
| [15] |
BALLERINI M, CABIBBO N, CANDELIER R, et al. Interaction ruling animal collective behavior depends on topological rather than metric distance: Evidence from a field study[J]. Proceedings of the National Academy of Sciences, 2008, 105(4): 1232-1237. doi: 10.1073/pnas.0711437105
|
| [16] |
BODE N W F, FRANKS D W, WOOD A J. Limited interactions in flocks: Relating model simulations to empirical data[J]. Journal of the Royal Society Interface, 2011, 8(55): 301-304. doi: 10.1098/rsif.2010.0397
|
| [17] |
HERBERT-READ J E, PERNA A, MANN R P, et al. Inferring the rules of interaction of shoaling fish[J]. Proceedings of the National Academy of Sciences, 2011, 108(46): 18726-18731. doi: 10.1073/pnas.1109355108
|
| [18] |
JOLLES J W, BOOGERT N J, SRIDHAR V H, et al. Consistent individual differences drive collective behavior and group functioning of schooling fish[J]. Current Biology, 2017, 27(18): 2862-2868. doi: 10.1016/j.cub.2017.08.004
|
| [19] |
LING H, MCLVOR G E, VAN DER VAART K, et al. Costs and benefits of social relationships in the collective motion of bird flocks[J]. Nature Ecology & Evolution, 2019, 3(6): 943-948. http://www.ncbi.nlm.nih.gov/pubmed/31061474
|
| [20] |
LING H, MCLVOR G E, VAN DER VAART K, et al. Local interactions and their group-level consequences in flocking jackdaws[J]. Proceedings of the Royal Society B, 2019, 286(1906): 20190865. doi: 10.1098/rspb.2019.0865
|
| [21] |
HILDENBRANDT H, CARERE C, HEMELRIJK C K. Self-organized aerial displays of thousands of starlings: A model[J]. Behavioral Ecology, 2010, 21(6): 1349-1359. doi: 10.1093/beheco/arq149
|
| [22] |
PETTIT B, PERNA A, BIRO D, et al. Interaction rules underlying group decisions in homing pigeons[J]. Journal of the Royal Society Interface, 2013, 10(89): 20130529. doi: 10.1098/rsif.2013.0529
|
| [23] |
REN W. On constrained nonlinear tracking control of a small fixed-wing UAV[J]. Journal of Intelligent and Robotic Systems, 2007, 48(4): 525-537. doi: 10.1007/s10846-006-9123-8
|
Figures(8) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: