| Citation: | ZHANG Qing, WANG Xingjian, MIAO Yinan, et al. Human motion direction prediction method based on eye tracking, pose and scene video[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1857-1865. doi: 10.13700/j.bh.1001-5965.2020.0316(in Chinese)

|
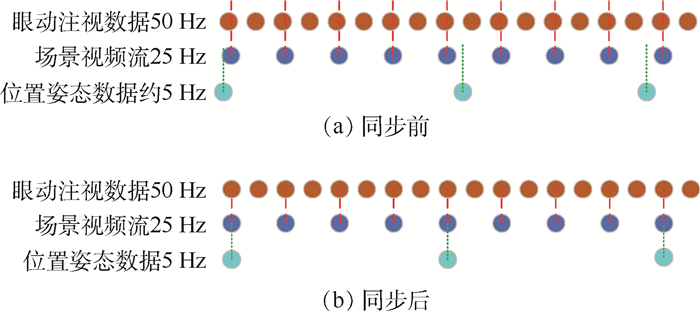
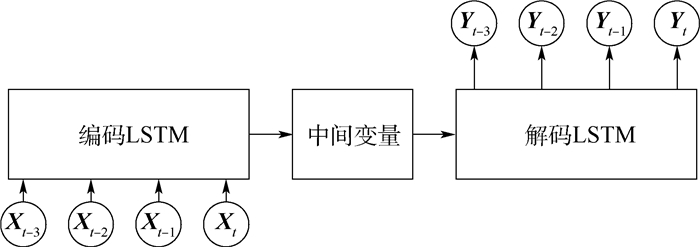
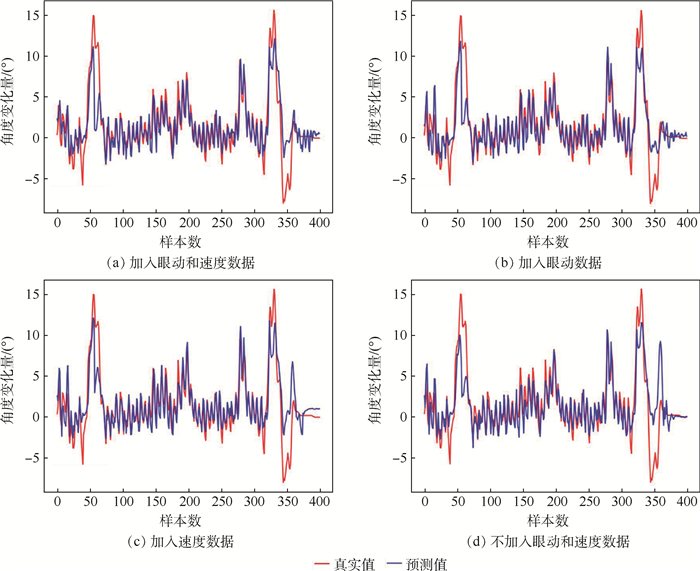
Exoskeleton robots, as newly proposed smart devices to improve and enhance human life ability, require efficient and intelligent human-computer interaction systems, and the first step of human-computer interaction is to accurtely predict human behavior intention. From the perspective of top-level control of exoskeleton robots, the current states and progress of human motion intention recognition and the intelligent interaction capabilities of exoskeleton robots are reported. Then, the recognition of human motion direction is studied. A network framework of human motion intention recognition combining eye tracking information, position and posture information, and scene video information is proposed, and wearable experiments of acquisition devices are carried out. The predictive capability of the network has been proved by experiments. The results show that the proposed recognition system can predict the movement direction during human movement.

| [1] |
JACOBSEN S C, OLIVIER M, SMITH F M, et al. Research robots for applications in artificial intelligence, teleoperation and entertainment[J]. The International Journal of Robotics Research, 2004, 23(4-5): 319-330. doi: 10.1177/0278364904042198
|
| [2] |
LIANG J W, JIANG L, NIEBLES J C, et al. Peeking into the future: Predicting future person activities and locations in videos[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2019: 2960-2963.
|
| [3] |
王昕. 面向下肢康复机器人的运动意图识别技术研究[D]. 杭州: 浙江大学, 2019: 97-98.
WANG X. Research on motion intention recognition technology for lower limb rehabilitation robot[D]. Hangzhou: Zhejiang University, 2019: 97-98(in Chinese).
|
| [4] |
ALAHI A, GOEL K, RAMANATHAN V, et al. Social LSTM: Human trajectory prediction in crowded spaces[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 961-971.
|
| [5] |
BHATTACHARYYA A, FRITZ M, SCHIELE B. Long-term on-board prediction of people in traffic scenes under uncertainty[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workships (CVPRW). Piscataway: IEEE Press, 2018: 4194-4202.
|
| [6] |
CHANDRA R, GUAN T R, PANUGANTI S, et al. Forecasting trajectory and behavior of road-agents using spectral clustering in graph-LSTMs[J]. IEEE Robotics and Automation Letters, 2020, 5(3): 4882-4890. doi: 10.1109/LRA.2020.3004794
|
| [7] |
CHANDRA R, BHATTACHARYA U, BERA A, et al. TraPHic: Trajectory prediction in dense and heterogeneous traffic using weighted interactions[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2019: 8475-8484.
|
| [8] |
XU Y Y, PIAO Z X, GAO S H. Encoding crowd interaction with deep neural network for pedestrian trajectory prediction[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR). Piscataway: IEEE Press, 2018: 5275-5284.
|
| [9] |
HAYASHI T, KAWAMOTO H, SANKAI Y. Control method of robot suit HAL working as operator's muscle using biological and dynamical information[C]//2005 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2005: 3063-3068.
|
| [10] |
张富平. 图像去噪增强算法的研究[D]. 重庆: 重庆大学, 2014: 1-2.
ZHANG F P. Research of image enhancement and image denoising[D]. Chongqing: Chongqing University, 2014: 1-2(in Chinese).
|
| [11] |
苏泫. 基于IMU预积分的视觉惯性里程计系统[D]. 广州: 华南理工大学, 2018: 5-7.
SU X. Visual-inertial odometry based on IMU pre-integration[D]. Guangzhou: South China University of Technology, 2018: 5-7(in Chinese).
|
| [12] |
QIN T, LI P L, SHEN S J. VINS-Mono: A robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. doi: 10.1109/TRO.2018.2853729
|
| [13] |
张裕天. 基于视觉感知的多模态多任务端到端自动驾驶方法研究[D]. 广州: 华南理工大学, 2019: 43-45.
ZHANG Y T. Research on multi-modal multi-task end-to-end autonomous driving method based on visual perception[D]. Guangzhou: South China University of Technology, 2019: 43-45(in Chinese).
|
| [14] |
HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]//2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2016: 770-778.
|
| [15] |
FLETCHER D, IAN P. 3D数学基础: 图形与游戏开发[M]. 史银雪, 陈洪, 王荣静, 译. 北京: 清华大学出版社, 2005: 154-157.
|
| [16] |
FLETCHER D, IAN P. 3D math primer for graphics and game development[M]. SHI Y X, CHEN H, WANG R J, translated. Beijing: Tsinghua University Press, 2005: 154-157(in Chinese).
|
| [17] |
FU R, ZHANG Z, LI L. Using LSTM and GRU neural network methods for traffic flow prediction[C]//2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC). Piscataway: IEEE Press, 2016: 324-328.
|
| [22] |
KINGMA D P, BA J. Adam: A method for stochastic optimization[EB/OL]. (2015-07-23)[2020-06-23]. https://arxiv.org/abs/1412.6980.
|

Figures(10) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: