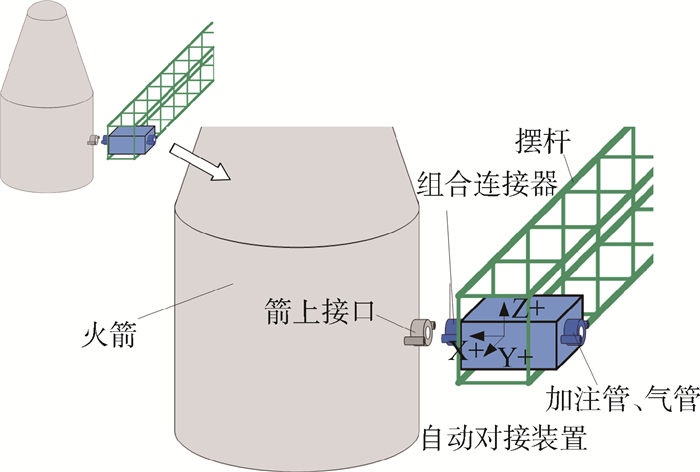
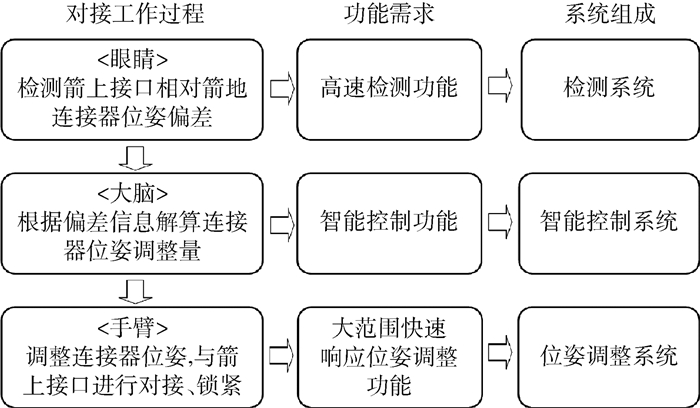
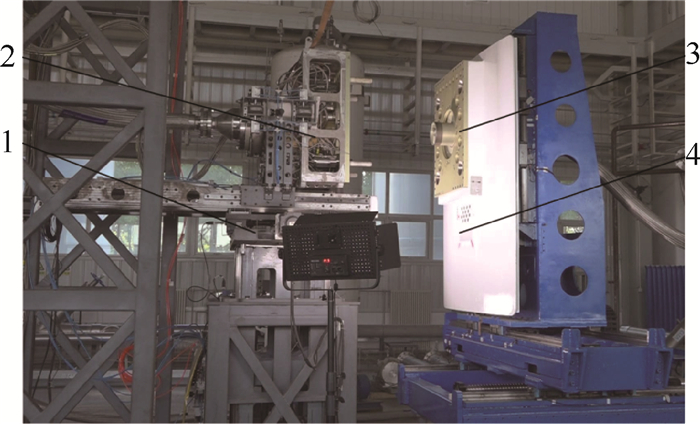
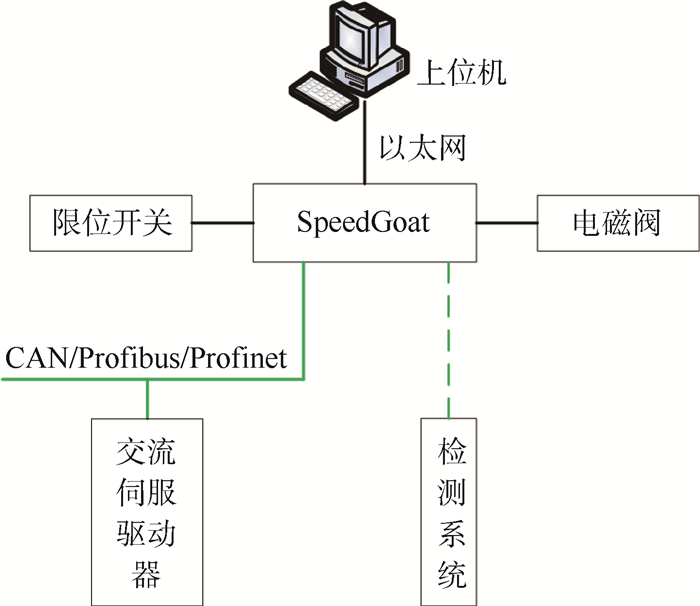
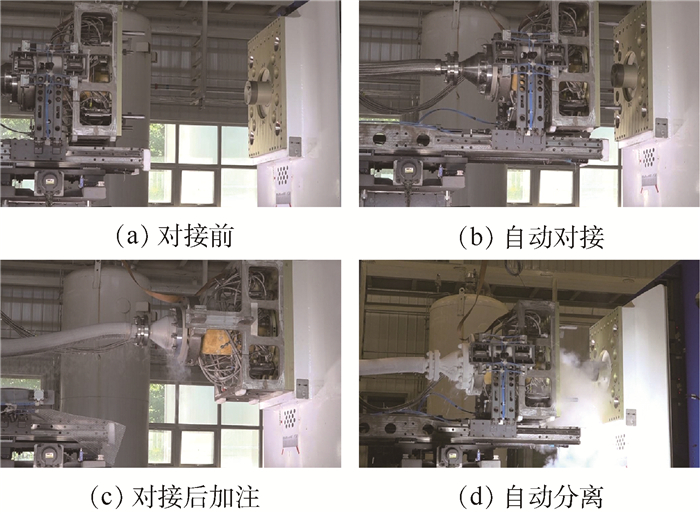
In order to realize the automatic docking of ground composite umbilical connector for heavy launch vehicle with rocket interface, enhance the safety and reliability, and reduce safeguards of launch preparation process, first, the technology and overall strategy of automatic docking of composite umbilical connector were analyzed in this paper, the technical scheme which is composed of detection, control and pose adjustment system was proposed, and the strategy of non-contact detecting, active tracking and passive servo was designed. Then, the experimental automatic docking system of composite umbilical connector was developed. Finally, a series of experimental verification work were carried out including automatic docking, low temperature filling and automatic separating. The results show that the detection, control and pose adjustment function of the automatic docking equipment are normal, the automatic docking strategy is accurate and feasible, the automatic docking problem of heavy-load composite umbilical connector under large scale and high speed condition is solved, the comprehensive tracking range reaches±600 mm, the comprehensive tracking speed reaches 500 mm/s, and the time for automatic docking under various operation conditions is about 3-5 min.


 Download (97218)
Download (97218) 
 Views
Views  Cited by
Cited by 





















































 XML Online Production Platform
XML Online Production Platform
