| Citation: | SUN Bing, CHEN Wei. Robust nonlinear flight control method against control saturation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(12): 2475-2483. doi: 10.13700/j.bh.1001-5965.2020.0473(in Chinese)

|
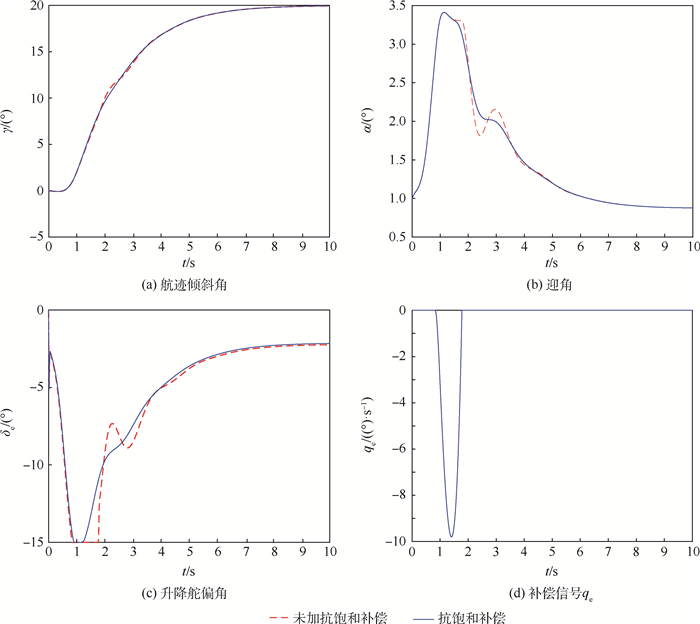
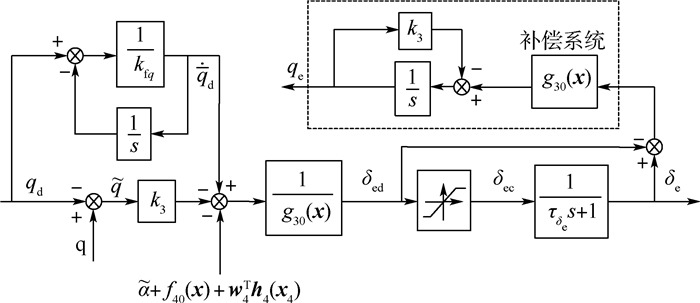
When the aerocraft is maneuvering in a large envelope, its rudder surface and engine are easily saturated. This phenomenon will not only affect the stability of the closed-loop system, but also greatly shorten the service life of the engine and other key components. To solve this problem, a nonlinear flight control method against saturation was designed. First, the strict feedback nonlinear model of the aerocraft was established. Then, the rudder control and engine speed control commands were designed by using adaptive backstepping design method, and the modeling error was approximated by Radial Basis Function (RBF) network. To solve the control saturation problem, the corresponding anti-saturation dynamic compensation systems were designed respectively. By establishing the Lyapunov function of the closed-loop system, the update weights of RBF network and the structural parameters of anti-saturation dynamic compensation system were determined by stability theory, which ensures the global stability of the designed closed-loop control system. Finally, the simulation results show that, when the control saturation occurs, the anti-saturation compensation system can modify the control command in real time, which helps the system to get out of saturation state quickly and shorten the saturation time by 30%-60%, with high command tracking accuracy.
| [1] |
孙径广, 孟庆鹏, 李传明. 带有落角约束的反舰导弹自适应饱和制导律设计[J]. 指挥控制与仿真, 2020, 42(3): 118-122. doi: 10.3969/j.issn.1673-3819.2020.03.022
SUN J G, MENG Q P, LI C M. Adaptive saturated guidance law designed for anti-ship missile with terminal angular constraint[J]. Command Control & Simulation, 2020, 42(3): 118-122(in Chinese). doi: 10.3969/j.issn.1673-3819.2020.03.022
|
| [2] |
HU J C, ZHANG H H, WANG Z G. Hybrid adaptive control of spacecraft attitude with input saturation and external disturbance[J]. Journal of Guidance, Control, and Dynamices, 2019, 42(3): 642-649. doi: 10.2514/1.G003090
|
| [3] |
PAULO R A, MIOARA J, CHRISTOPHE L, et al. Stable model predictives strategy for rendezvous hovering phases allowing for control saturation[J]. Journal of Guidance, Control, and Dynamices, 2019, 42(8): 1658-1675. doi: 10.2514/1.G003558
|
| [4] |
HU Q L, TAN X, AKELLA M A. Fitie-time fault-tolerant spacecraft attitude control with torque saturation[J]. Journal of Guidance, Control, and Dynamices, 2017, 40(10): 2524-2537. doi: 10.2514/1.G002191
|
| [5] |
刘田禾, 安昊, 王常虹. 高超声速飞行器的抗饱和切换控制[J]. 宇航学报, 2020, 41(3): 329-336.
LIU T H, AN H, WANG C H. Anti-windup switched control of hypersonic vehicle[J]. Journal of Astronautics, 2020, 41(3): 329-336(in Chinese).
|
| [6] |
刘田禾, 张立宪, 张瑞先, 等. 基于切换系统的高超声速飞行器建模及抗饱和控制方法: CN110244768A[P]. 2019-09-17.
LIU T H, ZHANG L X, ZHANG R X, et al. Hypersonic vehicle modeling and anti saturation control method based on switched system: CN110244768A[P]. 2019-09-17(in Chinese).
|
| [7] |
吴跃飞, 马大为, 乐贵高. 控制受限的火箭炮位置伺服系统鲁棒自适应反步控制[J]. 兵工学报, 2013, 34(4): 476-483.
WU Y F, MA D W, LE G G. Robust adaptive backstepping control for rocket launcher position servo system with constraint control[J]. Acta Armamentarii, 2013, 34(4): 476-483(in Chinese).
|
| [8] |
周洪波, 裴海龙, 贺跃帮. 状态受限的小型无人直升机轨迹跟踪控制[J]. 控制理论与应用, 2012, 29(6): 778-784.
ZHOU H B, PEI H L, HE Y B. Trajectory-tracking control for small unmanned helicopter with state constraints[J]. Control Theory & Applications, 2012, 29(6): 778-784(in Chinese).
|
| [9] |
HERRMANN G, MENON P P, TURNER M C. Anti-windup synthesis for nonlinear dynamic inversion control schemes[J]. International Journal of Robust and Nonlinear Control, 2010, 20(13): 1465-1482.
|
| [10] |
GUILLAUME J J. Fault-tolerant flight control and guidance systems[M]. Berlin: Springer, 2009: 118-119.
|
| [11] |
孙超娇, 陈勇, 景博. 基于权值优化的多操纵面抗饱和控制分配策略[J]. 系统工程与电子技术, 2019, 41(6): 1351-1357.
SUN C J, CHEN Y, JING B. Anti-windup control allocation strategy for over-actuated aircraft based on weight optimization[J]. Systems Engineering and Electronics, 2019, 41(6): 1351-1357(in Chinese).
|
| [12] |
成高, 刘满园, 李宪强, 等. 再入飞行器大攻角飞行时的姿态控制律设计[J]. 宇航学报, 2017, 38(8): 847-854.
CHENG G, LIU M Y, LI X Q, et al. The attitude controller design for the reentry vehicle flying with high angle of attack[J]. Journal of Astronautics, 2017, 38(8): 847-854(in Chinese).
|
| [13] |
周丽, 姜长生, 文杰. 超机动飞行的非线性鲁棒自适应控制系统研究[J]. 系统工程与电子技术, 2008, 30(4): 710-714. doi: 10.3321/j.issn:1001-506X.2008.04.029
ZHOU L, JIANG C S, WEN J. Research on robust and adaptive nonlinear control system of supermaneuverable fight[J]. Systems Engineering and Electronics, 2008, 30(4): 710-714(in Chinese). doi: 10.3321/j.issn:1001-506X.2008.04.029
|
| [14] |
姜超, 宋科璞, 周海军. 基于L1自适应方法的尾坐式无人机控制律设计[J]. 兵工自动化, 2017, 36(8): 14-19.
JIANG C, SONG K P, ZHOU H J. Control law design for tail-sitter UAV based on L1 adaptive control method[J]. Ordnance Industry Automation, 2017, 36(8): 14-19(in Chinese).
|
| [15] |
陈洁, 周绍磊, 宋召青. 高超声速飞行器迎角观测器及控制器设计[J]. 北京航空航天大学学报, 2011, 37(7): 827-832. https://bhxb.buaa.edu.cn/CN/Y2011/V37/I7/827
CHEN J, ZHOU S L, SONG Z Q. Nonlinear modelling and open-loop dynamatics characteristics for one hypersonic aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(7): 827-832(in Chinese). https://bhxb.buaa.edu.cn/CN/Y2011/V37/I7/827
|
| [16] |
SONNEVELDT L, CHU Q P, MULDER J A. Nonlinear flight control design using constrained adaptive backstepping[J]. Journal of Guidance, Control, and Dynamics, 2007, 30(2): 322-335.
|
| [1] | PIAN Rong, YANG Fan, ZHANG Ling, LIU Feng-rui, WANG Lin-juan, ZHAO Li-bin. Failure mode study of composite laminated plates under compression-shear loading[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0084 |
| [2] | REN W,LI J,WANG T Y,et al. Meshing theory and performance analysis of point-contact conjugate involute worm gear pair[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(10):3183-3195 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0778. |
| [3] | ZHANG Luheng, WANG Wenyu, DING Dandan. A Hierarchical Rate Control Method for End-to-End Image Compression[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0461 |
| [4] | CHANG Z N,HU M H,ZHANG Y,et al. A multi-objective optimal control trajectory optimization method for aircraft under wind influence[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(11):3521-3531 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0836. |
| [5] | ZHAO Yifei, GU Ruijia, REN Xinhui. Method for small unmanned aerial vehicles path planning considering urban low-altitude wind fields[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0281 |
| [6] | CENG Sheng-fu, LIANG Hao-quan, WANG Yan, SUN Kang-wen, ZHONG Zi-hong. status assessment of stratospheric airship based on improved combination weighting and cloud model[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0713 |
| [7] | PAN C Z,HE G,LI Z J,et al. Adaptive filtered control for uncertain electro-hydraulic servo systems with time-varying output constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1819-1828 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0497. |
| [8] | WEN Bo-qun, MIAO Jing-gang, LU Ying, ZHOU Shu-yu. Short-term prediction of stratospheric wind field based on POD-LSTM network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0608 |
| [9] | SHE W Q,LIU Y B,CHEN B Y. Altitude control strategy for high-aspect-ratio wings with active morphing[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1746-1752 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0612. |
| [10] | BAI F C,YANG X X,DENG X L,et al. Station keeping control for aerostat in wind fields based on deep reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2354-2366 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0629. |
| [11] | REN D J,XU S H,WANG S P,et al. Modeling and solution method of oil film dynamic coupling for spherical port pair[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2771-2779 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0724. |
| [12] | ZHANG C,ZHUANG K,YU P,et al. Process control net modelling and analyzing for satellite test and evaluation in launch site[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):1948-1955 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0628. |
| [13] | YUAN M Y,ZHOU J H,HAO Y,et al. Design of contactless power supply system for stratospheric airship anemometer[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):972-980 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0344. |
| [14] | QU Y,WANG S,ZENG L C,et al. Path planning algorithm for airborne pseudolites installed on stratospheric airships[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1071-1082 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0385. |
| [15] | GAO Yang, XU Guo-ning, WANG Sheng, LI Yong-xiang, CAI Rong, YANG Yan-chu. Stability analysis of stratospheric airship energy system[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0020 |
| [16] | ZHANG Y Z,LI W B,ZHENG T T. Inverted residual target detection algorithm based on LGC[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(6):1287-1293 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0452. |
| [17] | ZHAI J Q,YANG X X,DENG X L,et al. Global path planning of stratospheric aerostat in uncertain wind field[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(5):1116-1126 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0380. |
| [18] | ZHANG J L,YANG X X,DENG X L,et al. Altitude control of stratospheric aerostat based on deep reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(8):2062-2070 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0622. |
| [19] | YANG Xi-xiang, HOU Zhong-xi, HAN Yu, YANG Yang. Multifactor effect on output performance of solar array for stratospheric airships[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2022.0651 |
| [20] | LONG Yuan, DENG Xiaolong, YANG Xixiang, HOU Zhongxi. Short-term rapid prediction of stratospheric wind field based on PSO-BP neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1970-1978. doi: 10.13700/j.bh.1001-5965.2021.0068 |
| 1. | 郑志东,刘宁,韩笑雪,戴秋敏. 临近空间飞艇保形升空过程热运动特性研究. 航天返回与遥感. 2023(02): 24-32 .  | |
| 2. | 翟嘉琪,杨希祥,邓小龙,龙远,张经伦,柏方超. 不确定风场下平流层浮空器全局路径规划. 北京航空航天大学学报. 2023(05): 1116-1126 .  本站查看 本站查看 |

Figures(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Huang Jun, Wu Zhe, Zhu Rongchanget al. Optimized Collocation of Combat Aircraft Weapon Systems for Air Force[J]. Journal of Beijing University of Aeronautics and Astronautics, 1999, 25(5): 546-549. (in Chinese)





 DownLoad:
DownLoad: