| Citation: | LUO Jingwen, QIN Shiyin. FastSLAM for mobile robot based on box particle filter with intelligence optimization[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(1): 53-66. doi: 10.13700/j.bh.1001-5965.2020.0549(in Chinese)

|
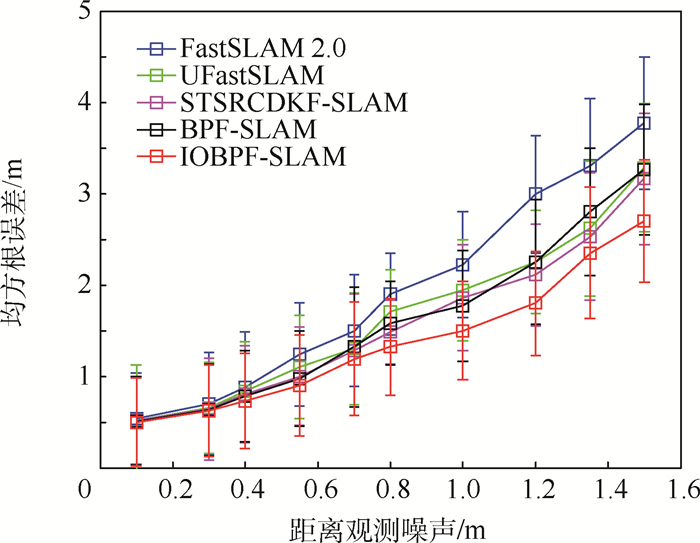
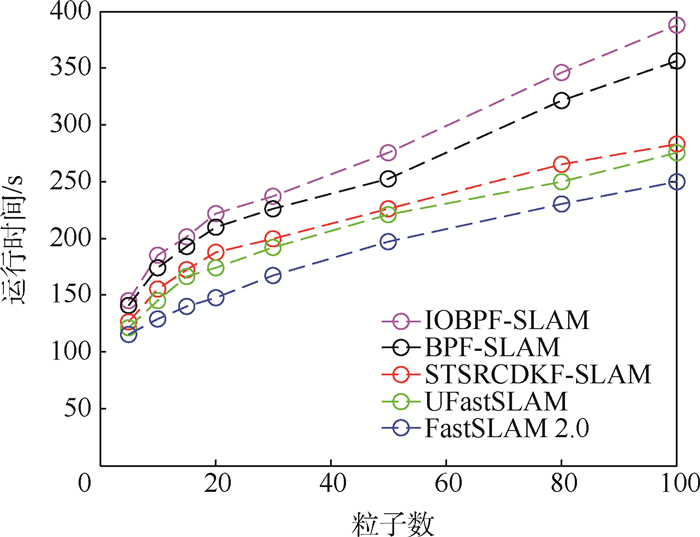
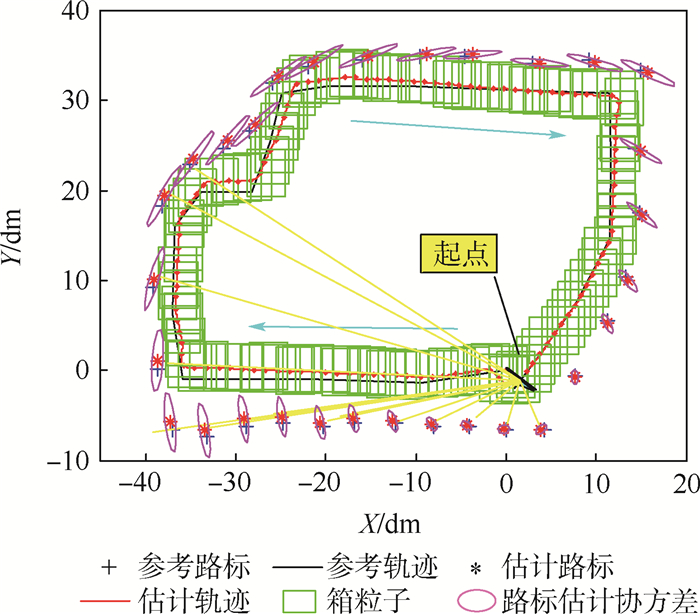
The traditional FastSLAM algorithm requires a large number of particles to build the map, thus resulting in high computational complexity and difficulty in improving the estimation accuracy. In view of these problems, an algorithm of FastSLAM for mobile robot is presented based on box particle filter with intelligence optimization (IOBPF). First, the dynamic optimization mechanism of firefly algorithm (FA) is applied to the box particle filter (BPF), and the formulas of fluorescence brightness updating, attraction calculation and position updating of box particle are constructed, which makes the box particles move toward the high-likelihood region intelligently and avoid the phenomenon of box particle degeneracy. Then, the improved BPF with intelligence optimization is utilized to estimate the pose of robot, and the extended interval Kalman filter (EIKF) is employed to complete the map building and updating. The results of model simulation and entity experiment of mobile robot show that the intelligent FastSLAM algorithm in this paper can effectively improve the performance of box particles and reduce the number of particles required for map construction, thus significantly improving the positioning accuracy and robustness of map construction.
| [1] |
王忠立, 赵杰, 蔡鹤皋. 大规模环境下基于图优化SLAM的图构建方法[J]. 哈尔滨工业大学学报, 2015, 47(1): 75-85. doi: 10.3969/j.issn.1009-1971.2015.01.011
WANG Z L, ZHAO J, CAI H G. A survey of front-end method for graph-based SLAM under large-scale environment[J]. Journal of Harbin Institute of Technology, 2015, 47(1): 75-85(in Chinese). doi: 10.3969/j.issn.1009-1971.2015.01.011
|
| [2] |
SMITH R C, CHEESEMAN P. On the representation and estimation of spatial uncertainty[J]. International Journal of Robotics Research, 1986, 5(4): 56-68. doi: 10.1177/027836498600500404
|
| [3] |
HOLMES S A, KLEIN G, MURRAY D W. An O(N2) square root unscented Kalman filter for visual simultaneous localization and mapping[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(7): 1251-1263. doi: 10.1109/TPAMI.2008.189
|
| [4] |
DOUCET A, DE FREITAS N, MURPHY K, et al. Rao-Blackwellised particle filtering for dynamic Bayesian networks[M]//DOUCET A, DE FREITAS N, GORDON N. Sequential Monte Carlo method in practice. Berlin: Springer, 2001: 499-515.
|
| [5] |
MONTEMERLO M, THRUN S, KOLLER D, et al. FastSLAM: A factored solution to the simultaneous localization and mapping problem[C]//Proceedings of the National Conference on Artificial Intelligence, 2002: 593-598.
|
| [6] |
MONTEMERLO M, THRUN S, ROLLER D, et al. FastSLAM 2.0: An improved particle filtering algorithm for simultaneous localization and mapping that provably converges[C]//Proceeding of the International Joint Conference on Artificial Intelligence, 2003: 1151-1156.
|
| [7] |
ELIAZAR A, PARR R. DP-SLAM: Fast, robust simultaneous localization and mapping without predetermined landmarks[C]//Proceedings of the International Joint Conference on Artificial Intelligence, 2003: 1135-1142.
|
| [8] |
HAHNEL D, BURGARD W, FOX D, et al. An efficient fastSLAM algorithm for generating maps of large-scale cyclic environments from raw laser range measurements[C]//International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2003, 1: 206-211.
|
| [9] |
GRISETTI G, STACHNISS C, BURGARD W. Improved techniques for grid mapping with Rao-Blackwellized particle filters[J]. IEEE Transactions on Robotics, 2007, 23(1): 34-46. doi: 10.1109/TRO.2006.889486
|
| [10] |
祝继华, 郑南宁, 袁泽剑, 等. 基于ICP算法和粒子滤波的未知环境地图创建[J]. 自动化学报, 2009, 35(8): 1107-1113.
ZHU J H, ZHENG N N, YUAN Z J, et al. A SLAM approach by combining ICP algorithm and particle filter[J]. Acta Automatica Sinica, 2009, 35(8): 1107-1113(in Chinese).
|
| [11] |
BAILEY T, NIETO J, NEBOT E. Consistency of the FastSLAM algorithm[C]//IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2006: 424-429.
|
| [12] |
VINCKE B, LAMBERT A, ELOUARDI A. Guaranteed simultaneous localization and mapping algorithm using interval analysis[C] //International Conference on Control Automation Robotics and Vision. Piscataway: IEEE Press, 2018: 1409-1414.
|
| [13] |
ABDALLAH F, GNING A, BONNIFAIT P. Box particle filtering for nonlinear state estimation using interval analysis[J]. Automatica, 2008, 44(3): 807-815. doi: 10.1016/j.automatica.2007.07.024
|
| [14] |
李振兴, 刘进忙, 李松, 等. 基于箱式粒子滤波的群目标跟踪算法[J]. 自动化学报, 2015, 41(4): 785-798.
LI Z X, LIU J M, LI S, et al. Group targets tracking algorithm based on box particle filter[J]. Acta Automatica Sinica, 2015, 41(4): 785-798(in Chinese).
|
| [15] |
GNING A, RISTIC B, MIHAYLOVA L. Bernoulli particle/box-particle filters for detection and tracking in the presence of triple measurement uncertainty[J]. IEEE Transactions on Signal Processing, 2012, 60(5): 2138-2151. doi: 10.1109/TSP.2012.2184538
|
| [16] |
YANG X S. Firefly algorithm, stochastic test functions and design optimization[J]. International Journal of Bio-Inspired Computation, 2010, 2(2): 78-84. doi: 10.1504/IJBIC.2010.032124
|
| [17] |
CHEN G, WANG J, SHIEH L S. Interval Kalman filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 1997, 33(1): 250-259. doi: 10.1109/7.570759
|
| [18] |
JAULIN L, KIEFFER M, DIDRIT O, et al. Applied interval analysis[M]. Berlin: Springer, 2001: 1-116.
|
| [19] |
GNING A, MIHAYLOVA L, ABDALLAH F. Mixture of uniform probability density functions for non-linear state estimation using interval analysis[C]//The 13th Conference on Information Fusion. Piscataway: IEEE Press, 2010: 1-8.
|
| [20] |
GNING A, RISTIC B, MIHAYLOVA L, et al. An introduction to box particle filtering[J]. IEEE Signal Processing Magazine, 2013, 30(4): 166-171. doi: 10.1109/MSP.2013.2254601
|
| [21] |
田梦楚, 薄煜明, 陈志敏, 等. 萤火虫算法智能优化粒子滤波[J]. 自动化学报, 2016, 42(1): 89-97.
TIAN M M, BO Y M, CHEN Z M, et al. Firefly algorithm intelligence optimized particle filter[J]. Acta Automatica Sinica, 2016, 42(1): 89-97(in Chinese).
|
| [22] |
LI N, MA H, YANG C. Interval Kalman filter based RFID indoor positioning[C]//Control and Decision Conference. Piscataway: IEEE Press, 2016: 6958-6963.
|
| [23] |
LE Y, HE X F, XIAO R Y. MEMS IMU and GPS/Beidou integration navigation system using interval Kalman filter[J]. Applied Mechanics and Materials, 2014, 568-570: 970-975. doi: 10.4028/www.scientific.net/AMM.568-570.970
|
| [24] |
HE X F, VIK B. Use of extended interval Kalman filter on integrated GPS/INS system[C]//Proceedings of International Technical Meeting of the Satellite Division of the Institute of Navigation, 1999: 1907-1914.
|
| [25] |
万振刚. MINS/GPS组合导航系统若干关键技术研究[D]. 南京: 东南大学, 2005: 55-56.
WAN Z G. Research on some key technologies of MINS/GPS integrated navigation system[D]. Nanjing: Southeast University, 2005: 55-56(in Chinese).
|
| [26] |
BAILEY T. SLAM simulations[DS/OL]. (2008-06-10)[2020-08-20].
|
| [27] |
KIM C, SAKTHIVEL R, WAN K C. Unscented fastSLAM: A robust and efficient solution to the SLAM problem[J]. IEEE Transactions on Robotics, 2008, 24(4): 808-820. doi: 10.1109/TRO.2008.924946
|
| [28] |
DUAN J M, LIU D, YU H X, et al. An improved FastSLAM algorithm for autonomous vehicle based on the strong tracking square root central difference Kalman filter[C]//2015 IEEE 18th International Conference on Intelligent Transportation Systems (ITSC 2015). Piscataway: IEEE Press, 2015: 693-698.
|
| [29] |
STACHNISS C. Robotic mapping and exploration[M]. Berlin: Springer, 2009: 10-16.
|
| [1] | LIU He, WEI Cheng, ZHANG Zexu, SUN Bo, HU Zihang. Spacecraft Anomaly Detection Based on Filtered Autoencoder Envelope Analysis[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0832 |
| [2] | WANG L Y,HE H F,HE Y M,et al. Three-dimensional polarization filtering method of generalized oblique projection based on SVT[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(2):633-643 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0019. |
| [3] | JIANG C J,LIU P,SHU P. Dynamic visual SLAM algorithm based on improved YOLOv5s[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):763-771 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0154. |
| [4] | CHEN X P,WANG J F,ZHANG H,et al. Construction and application of knowledge graph in LOX/LH2 engine domain[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(3):821-830 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0333. |
| [5] | JI Xudong, CHEN Youdong, WEI Hongxing. Robust control of mobile robots based on H∞ under DoS attack[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0267 |
| [6] | CHEN C,GE J H,XU J L,et al. Influence of inlet corner wave system on performance of scramjet nozzle[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(10):3250-3261 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0768. |
| [7] | NIE Li, LI Chenliang, LIU Wangkui, SHEN Haidong, LIU Yanbin, CHEN Jinbao. Adaptive neural network based fixed-time command-filtered control for quadrotor unmanned aerial vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0403 |
| [8] | PAN C Z,HE G,LI Z J,et al. Adaptive filtered control for uncertain electro-hydraulic servo systems with time-varying output constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1819-1828 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0497. |
| [9] | LI H,ZHONG H P,ZHANG P,et al. Multi-shift interferometric phase filtering method based on convolutional neural network[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):2043-2050 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0805. |
| [10] | CHEN Hui, LIU Meng-bo, LIAN Feng, HAN Chong-zhao. Star convex irregular shape multi-extended target PMBM filter[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0766 |
| [11] | BEN Y Y,TANG R,DAI P A,et al. Image enhancement algorithm for underwater vision based on weighted fusion[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1438-1445 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0540. |
| [12] | LIU M J,LUO J W,QIN S Y. 3D SLAM algorithm based on geometric constraints of feature points in dynamic scenarios[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2872-2884 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0721. |
| [13] | WANG Z D,GUANG C H,WANG L Q,et al. Design and implementation of robot-assisted subretinal injection system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2406-2414 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0667. |
| [14] | XIA Xin-hui, JIA Ying-hong, ZHANG Jun. Spherical-caging-based control of a dual-arm space robot for capturing an object[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0258 |
| [15] | ZHANG Yun, XIAO Sheng, JIANG Li-fei, MENG Wan-ting, YANG Shu-hu, HAN Yan-ling. Multivariate Machine Learning for the Significant Wave Height Retrieval Model from CYGNSS[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0265 |
| [16] | ZHANG S F,LI Y Y,ZHANG T. Adaptive Monte Carlo localization algorithm based on fast affine template matching[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):2898-2905 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0001. |
| [17] | ZHANG H,YU Y Z,QIU X T. ORB-SLAM2 algorithm based on improved key frame selection[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):45-52 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0173. |
| [18] | WANG C Y,YANG L M,LI Y H. A mapping leader formation control strategy for multiple mobile robots based on two-stage sliding mode control[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3108-3114 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0792. |
| [19] | WU Lan, WU Yuanming, KONG Fanshi, LI Binquan. Traffic signal timing method based on deep reinforcement learning and extended Kalman filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(8): 1353-1363. doi: 10.13700/j.bh.1001-5965.2021.0529 |
| [20] | CHI Shengkai, XIE Yongfang, CHEN Xiaofang, PENG Fan. Obstacle avoidance method of mobile robot based on obstacle cost potential field[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2289-2303. doi: 10.13700/j.bh.1001-5965.2021.0095 |
| 1. | 蔡艳,杨光永,陈旭东,徐天奇. SLAM精度的向量加权平均自适应调节研究. 组合机床与自动化加工技术. 2024(01): 109-113 .  | |
| 2. | 李强. 基于多模态数据和粒子滤波器的移动机器人目标跟踪方法. 计算机测量与控制. 2024(02): 325-331 . | |
| 3. | 赵文金,朱子恒,吴云雁. 基于SLAM导航的煤矿井下机器人设计. 山东煤炭科技. 2024(02): 161-165 . | |
| 4. | 蔡艳,杨光永,樊康生,徐天奇. 基于多策略人工蜂鸟优化PF的SLAM研究. 组合机床与自动化加工技术. 2024(04): 92-97 . | |
| 5. | 蔡艳,杨光永,黄训爱,徐天奇. 多策略鲸鱼算法优化粒子滤波的SLAM精度研究. 重庆理工大学学报(自然科学). 2023(06): 136-145 . | |
| 6. | 蔡艳,杨光永,樊康生,徐天奇. 基于IINFO的粒子重组FastSLAM在SLAM中的研究. 组合机床与自动化加工技术. 2023(09): 31-34+38 . | |
| 7. | 张江桥,范平清,陈勇. 基于主观贝叶斯多传感器数据融合的AGV精确定位研究. 云南大学学报(自然科学版). 2023(05): 1015-1021 . | |
| 8. | 杨光永,蔡艳,陈旭东,徐天奇. 多策略人工兔算法优化粒子滤波的SLAM精度研究. 重庆理工大学学报(自然科学). 2023(11): 257-268 . | |
| 9. | 吴君钦,刘小兰,窦蕾萍,刘雯雯,曾亮. 基于块稀疏的低复杂度宽带MIMO-OFDM稀疏信道估计方案. 科学技术与工程. 2022(26): 11444-11451 . |


Figures(13) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Chen Qingkui, Na Lichun. Communication model for data-intensive grid[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(11): 1071-1075. (in Chinese)





 DownLoad:
DownLoad: