| Citation: | LI Chunhui, MA Jian, YANG Yongjian, et al. Low-complexity adaptive cubature Kalman filter algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(4): 716-724. doi: 10.13700/j.bh.1001-5965.2020.0642(in Chinese)

|
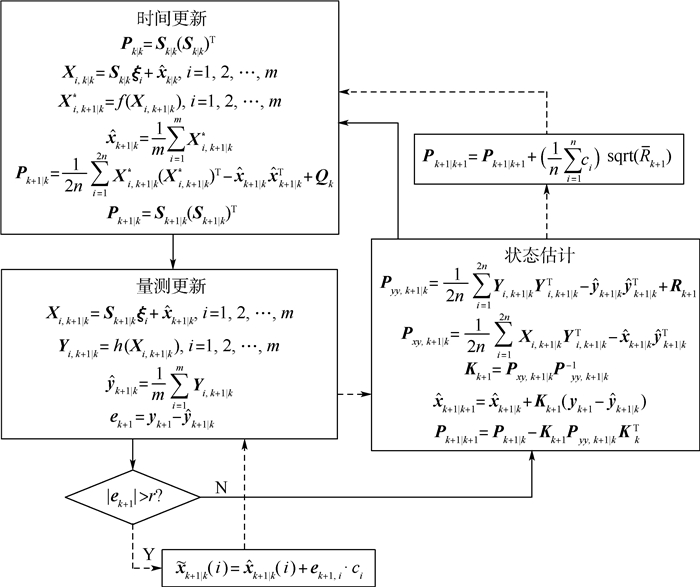
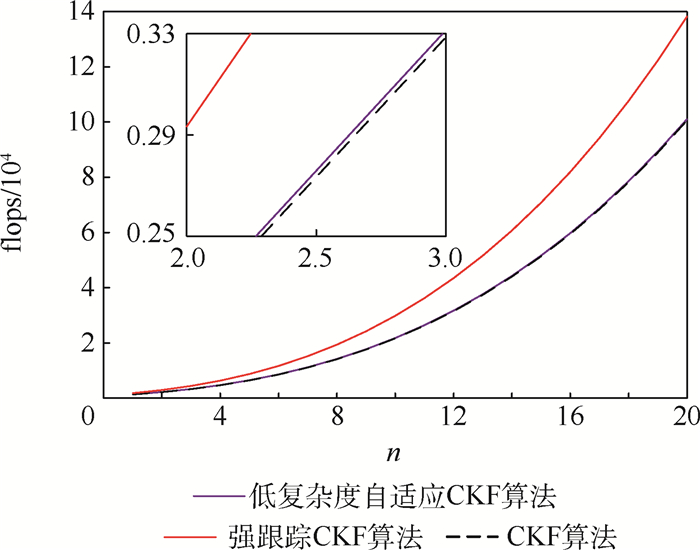
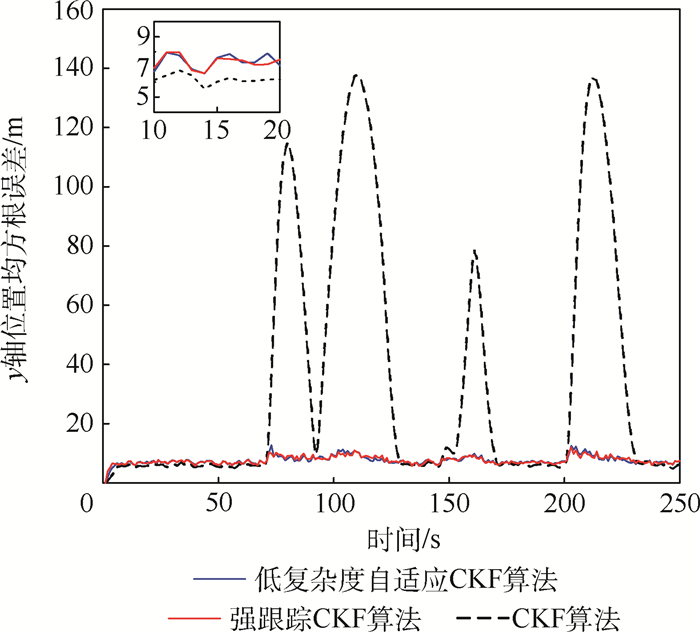
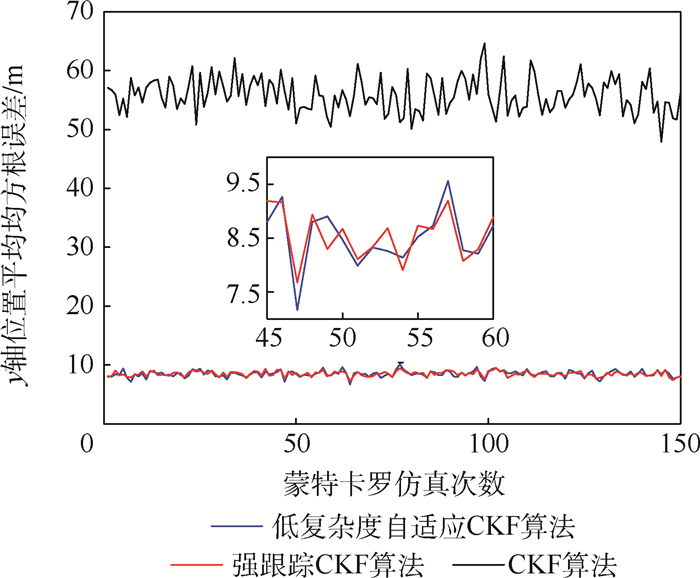
Cubature Kalman filter (CKF) with good filtering performance is one of the deterministic sampling filtering algorithms, but it is not able to overcome the impact caused by the target model uncertainty or the mutation of the target state. Constructing strong tracking CKF can effectively improve the adaptability of the algorithm, but the computation is greatly increased when solving the fading factor. A low-complexity adaptive CKF algorithm is proposed to solve the above problems. By establishing adaptive judgment criteria and amending method based on innovation sequence, the predicted state value is directly amended, so that the filtering algorithm can keep up with the real state of the target in time, and thus improve the filtering accuracy. The complexity of CKF, strong tracking CKF and the proposed algorithm are calculated and analyzed by using floating point operations. At the same time, the above three algorithms are applied to target tracking with inaccurate modeling, and are verified through simulation. The simulation results show that both the proposed algorithm and the strong tracking CKF algorithm can maintain better filtering accuracy and numerical stability in the case of mismatched target modeling, and the proposed algorithm has obvious improvement in algorithm complexity.
| [1] |
王小旭, 潘泉, 黄鹤, 等. 非线性系统确定采样型滤波算法综述[J]. 控制与决策, 2012, 27(6): 801-812.
WANG X X, PAN Q, HUANG H, et al. Overview of deterministic sampling filtering algorithms for nonlinear system[J]. Control and Decision, 2012, 27(6): 801-812(in Chinese).
|
| [2] |
JULIER S J, UHLMANN J K, DURRANT-WHYTE H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482. doi: 10.1109/9.847726
|
| [3] |
MERWE R V, WAN E A. Sigma-point Kalman filters for integrated navigation[C]//Processing of the 60th Annual Meeting of the Institute of Navigation, 2004: 641-654.
|
| [4] |
ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254-1269. doi: 10.1109/TAC.2009.2019800
|
| [5] |
ARASARATNAM I, HAYKIN S. Cubature Kalman filtering for continuous-discrete systems: Theory and simulations[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 4977-4993. doi: 10.1109/TSP.2010.2056923
|
| [6] |
JULIER S J, UHLMANN J K. A general method for approximating nonlinear transformation of probability distributions[EB/OL]. (1996-11-01)[2020-10-29].
|
| [7] |
穆静, 蔡远利. 迭代容积卡尔曼滤波算法及其应用[J]. 系统工程与电子技术, 2011, 33(7): 1454-1457. doi: 10.3969/j.issn.1001-506X.2011.07.05
MU J, CAI L Y. Iterated cubature Kalman filter and its application[J]. Systems Engineering and Electronics, 2011, 33(7): 1454-1457(in Chinese). doi: 10.3969/j.issn.1001-506X.2011.07.05
|
| [8] |
ZHANG H W, XIE J W, GE J A, et al. Adaptive strong tracking square-root cubature Kalman filter for maneuvering aircraft tracking[J]. IEEE Access, 2018, 6: 10052-10061. doi: 10.1109/ACCESS.2018.2808170
|
| [9] |
ZHANG H W, XIE J W, GE J A, et al. Strong tracking SCKF based on adaptive CS model for manoeuvring aircraft tracking[J]. IET Radar, Sonar & Navigation, 2018, 12(7): 742-749.
|
| [10] |
HAN B, HUANG H Q, LEI L, et al. An improved IMM algorithm based on STSRCKF for maneuvering target tracking[J]. IEEE Access, 2019, 7: 57795-57804. doi: 10.1109/ACCESS.2019.2912983
|
| [11] |
徐树生, 林孝工. 基于鲁棒CKF的多传感器全信息融合算法[J]. 电机与控制学报, 2013, 17(2): 90-97. doi: 10.3969/j.issn.1007-449X.2013.02.014
XU S S, LIN X G. Multi-sensor all information fusion algorithm based on robust CKF[J]. Machines and Control, 2013, 17(2): 90-97(in Chinese). doi: 10.3969/j.issn.1007-449X.2013.02.014
|
| [12] |
ZHOU D H, XI Y G, ZHANG Z J. A suboptimal multiple extended Kalman filters[J]. Chinese Journal of Automation, 1992, 4(2): 145-152.
|
| [13] |
孙妍, 鲁涤强, 陈启军. 一种基于强跟踪的改进容积卡尔曼滤波器[J] 华中科技大学学报(自然科学版), 2013, 41(S1): 451-454.
SUN Y, LU D Q, CHEN Q J. An improved cubature Kalman filters based on strong tracking[J]. Journal of Huazhong University of Science and Technology(Nature Science Edition), 2013, 41(S1): 451-454(in Chinese).
|
| [14] |
ZHAO L Q, WANG J L, YU T, et al. Design of adaptive robust square-root cubature Kalman filter with noise statistic estimator[J]. Applied Mathematics and Computation, 2015, 256: 352-367. doi: 10.1016/j.amc.2014.12.036
|
| [15] |
GE Q B, LI W B, WEN C L. SCKF-STF-CN: A universal nonlinear filter for maneuver target tracking[J]. Journal of Zhejiang University Science C, 2011, 12(8): 678-686. doi: 10.1631/jzus.C10a0353
|
| [16] |
LI N, ZHU R, ZHANG Y. A strong tracking square-root CKF algorithm based on multiple fading factors for target tracking[C]//Processing of the 7th International Joint Conference on Computational Sciences and Optimization. Piscataway: IEEE Press, 2014: 16-24.
|
| [17] |
ZHANG A, BAO S D, BI W H, et al. Low-cost adaptive square-root cubature Kalman filter for systems with process model uncertainty[J]. Journal of Systems Engineering and Electronics, 2016, 27(5): 945-953. doi: 10.21629/JSEE.2016.05.01
|
| [18] |
ZHANG A, BAO S D, GAO F, et al. A novel strong tracking cubature Kalman filter and its application in maneuvering target tracking[J]. Chinese Journal of Aeronautics, 2019, 32(11): 2489-2502. doi: 10.1016/j.cja.2019.07.025
|
| [19] |
张浩为, 谢军伟, 葛佳昂, 等. 自适应CS模型的强跟踪平方根容积卡尔曼滤波算法[J]. 系统工程与电子技术, 2019, 41(6): 19-27.
ZHANG H W, XIE J W, GE J A, et al. Strong tracking square-root cubature Kalman filter over adaptive current statistical model[J]. Systems Engineering and Electronics, 2019, 41(6): 19-27(in Chinese).
|
| [20] |
戴定成, 蔡宗平, 牛创. 基于简化平方根容积卡尔曼滤波的跟踪算法[J]. 电光与控制, 2015, 22(3): 11-14.
DAI D C, CAI Z P, NIU C. Target tracking algorithm based on reduced square-root cubature Kalman filter[J]. Electronics Optics & Control, 2015, 22(3): 11-14(in Chinese).
|
| [21] |
张召友, 郝燕玲, 吴旭. 3种确定性采样非线性滤波算法的复杂度分析[J]. 哈尔滨工业大学学报, 2013, 45(12): 111-115. doi: 10.11918/j.issn.0367-6234.2013.12.020
ZHANG Z Y, HAO Y L, WU X. Complexity analysis of three deterministic sampling nonlinear filtering algorithms[J]. Journal of Harbin Institute of Technology, 2013, 45(12): 111-115(in Chinese). doi: 10.11918/j.issn.0367-6234.2013.12.020
|
| [22] |
GREWAL M S, ANDREW A P. Kalman filtering, theory and practice using Matlab[M]. 2nd ed. New York: John Wiley & Sons, 2008: 225-289.
|
| [1] | GUO F,HAN W,LIU Y J,et al. Time uncertainty analysis on cyclic operation procedures of carrier aircraft based on MC-GERT[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):795-805 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0129. |
| [2] | LI K,SHEN Z G,ZHANG X J. Study on uncertainties of graphene tag antenna by screen printing[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):857-864 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0159. |
| [3] | CHEN Hui, LIU Meng-bo, LIAN Feng, HAN Chong-zhao. Star convex irregular shape multi-extended target PMBM filter[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0766 |
| [4] | PAN C Z,HE G,LI Z J,et al. Adaptive filtered control for uncertain electro-hydraulic servo systems with time-varying output constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(6):1819-1828 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0497. |
| [5] | NIE Li, LI Chenliang, LIU Wangkui, SHEN Haidong, LIU Yanbin, CHEN Jinbao. Adaptive neural network based fixed-time command-filtered control for quadrotor unmanned aerial vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0403 |
| [6] | HUANG Jie-yu, ZHANG Hao-wei, XIE Jun-wei, LI Zheng-jie, QI Cheng, DING Zi-hang. A resource optimization allocation algorithm for radar networked system for stealth target tracking[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0782 |
| [7] | CHAI G Q,BO X S,LIU H J,et al. Self-supervised scene depth estimation for monocular images based on uncertainty[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(12):3780-3787 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0943. |
| [8] | PANG F Q,ZHAO H F,KANG Y Y. Uncertainty estimation fused end-to-end video event detection algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(12):3759-3770 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0897. |
| [9] | LIU Ting, LIU Xiao, GUO Lei, CENG Lei, GUO Yijun. Research on Uncertainty Analysis Methods for Heat Transfer Ablation in Carbon-Based Materials[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0301 |
| [10] | WANG Zhi-hui, XIANG Zhi-ning, GAO Ping. Research on Uncertainty in Kill Effectiveness of Anti-Ship Ballistic Missiles[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0774 |
| [11] | DING Jianli, LIU Hu, CAO Weidong. Quantitative model of uncertainty for prediction of flight transit time[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0445 |
| [12] | LI Z X,MA M Y,WU J H,et al. Model correction method for CFD numerical simulation under mixed aleatory and epistemic uncertainty[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2343-2353 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0624. |
| [13] | LUO Y L,LIAO Y R,LI Z M,et al. Strong tracking CKF adaptive interactive multiple model tracking algorithm based on hypersonic target[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2272-2283 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0587. |
| [14] | ZHANG B H,CHAI D D,MENG L B,et al. Anti-occlusion target tracking algorithm of UAV based on multiple detection[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2442-2454 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0693. |
| [15] | JIN G D,XUE Y L,TAN L N,et al. Aerial object tracking algorithm for UAVs based on dual-attention shuffling[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):53-65 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0177. |
| [16] | WANG Guang-han, SONG Chen, YANG Chao. Influence of airfoil uncertainty on aerodynamic characteristics and shape inspection method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0647 |
| [17] | DONG X X,YUE Z J,WANG Z,et al. Uncertainty lightweight design of sandwich structure of rocket fairing cone[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(3):625-635 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0267. |
| [18] | GUO Q,WU T H,XU W,et al. Target tracking algorithm based on saliency awareness and consistency constraint[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(9):2244-2257 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0688. |
| [19] | WU Sunyong, ZHOU Yusong, XIE Yun, CAI Ruhua, FAN Xiangting. Extended target tracking algorithm based on MM-GGIW-PMBM filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(12): 2356-2364. doi: 10.13700/j.bh.1001-5965.2021.0162 |
| [20] | ZHANG Wei, WANG Qiang, LU Jiachen, YAN Chao. Robust optimization design under geometric uncertainty based on PCA-HicksHenne method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(12): 2473-2481. doi: 10.13700/j.bh.1001-5965.2021.0142 |
| 1. | 李春辉,马健,杨永建,肖冰松,邓有为. 基于SRCKF的多传感器融合自适应鲁棒算法. 北京航空航天大学学报. 2023(01): 220-228 .  本站查看 本站查看 | |
| 2. | 占荣辉,李祖检,滕书华. 闪烁噪声条件下基于交互多模框架的雷达目标跟踪算法. 国防科技大学学报. 2023(05): 140-149 .  | |
| 3. | 丁晓,孟秀云,张书森. 基于改进的自适应平方根容积卡尔曼滤波相对导航算法. 飞行力学. 2023(05): 58-64 . | |
| 4. | 宋伟,李春菊. 自适应随机权重容积卡尔曼滤波交互多模型目标跟踪. 电光与控制. 2023(10): 46-50+56 . | |
| 5. | 沈晓康. 基于自适应CKF的输电线路运检数据融合研究. 电子元器件与信息技术. 2023(08): 101-104+109 . | |
| 6. | 范佳欣,郭权利. 基于容积卡尔曼滤波的输电线路弧垂预测. 现代电子技术. 2023(23): 173-177 . | |
| 7. | 李鹏,荣冬成,向宇翔,凌智琛,夏珺. 改进自适应抗差容积卡尔曼滤波多源室内定位. 导航定位与授时. 2022(03): 107-113 . | |
| 8. | 周乾君,吴盘龙,李继民. 一种联合估计的RAM类目标跟踪算法. 指挥控制与仿真. 2022(04): 48-52 . | |
| 9. | 颜丽,邓芳明. 面向复杂环境的输电线路关键设备缺陷检测方法. 无线电工程. 2022(12): 2237-2244 . |


Figures(9) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Wang Wenwen, Diao Xungang, Wang Zheng, et al. Optical, electrical and infrared emissing properties of DC magnetron sputtered ZnO:Al thin films[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(02): 236-241. (in Chinese)





 DownLoad:
DownLoad: