| Citation: | CUI Jieming, YU Guizhen, ZHOU Bin, et al. Mandatory lane change decision-making model based on neural network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 890-897. doi: 10.13700/j.bh.1001-5965.2020.0662(in Chinese)

|
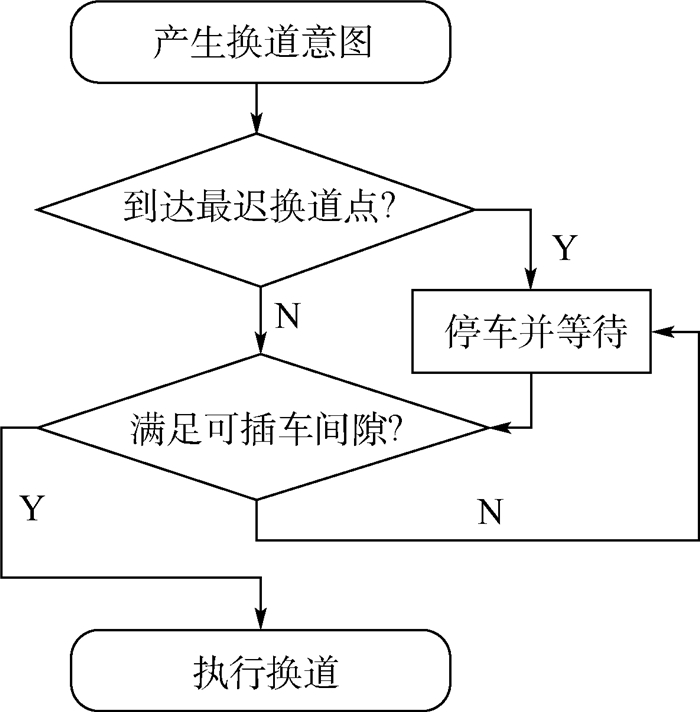
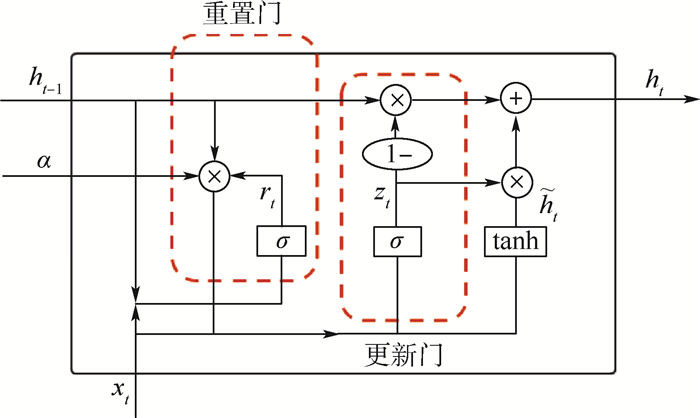
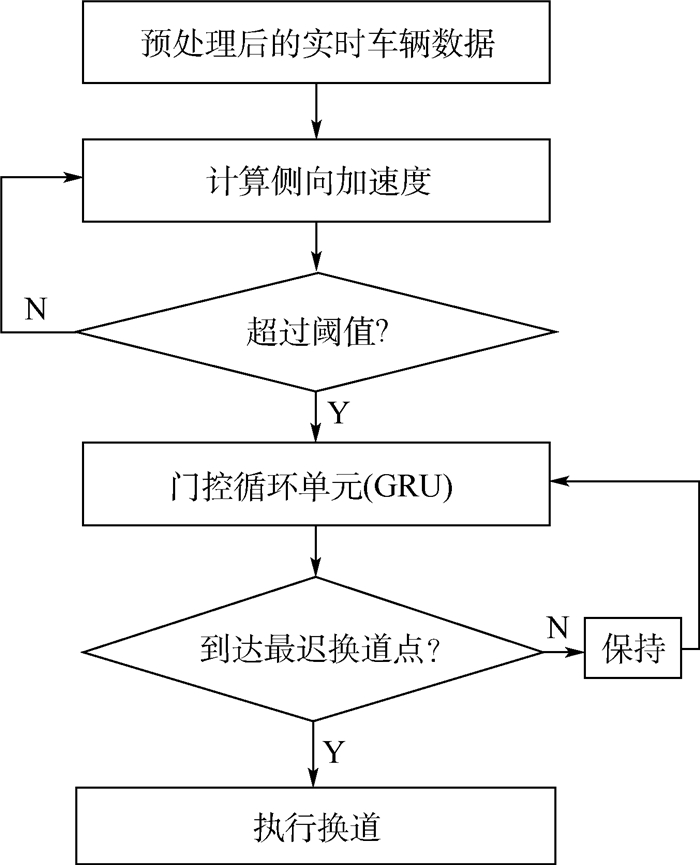
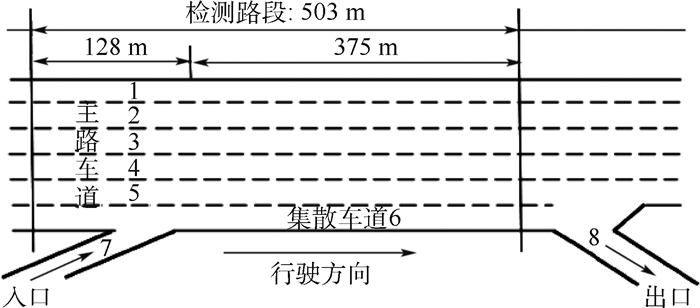
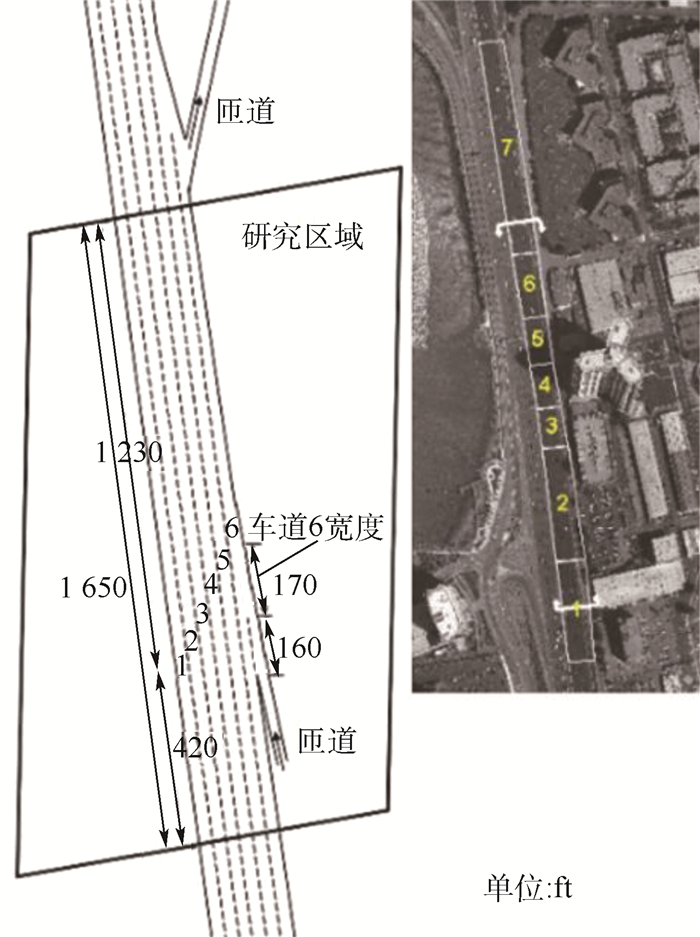
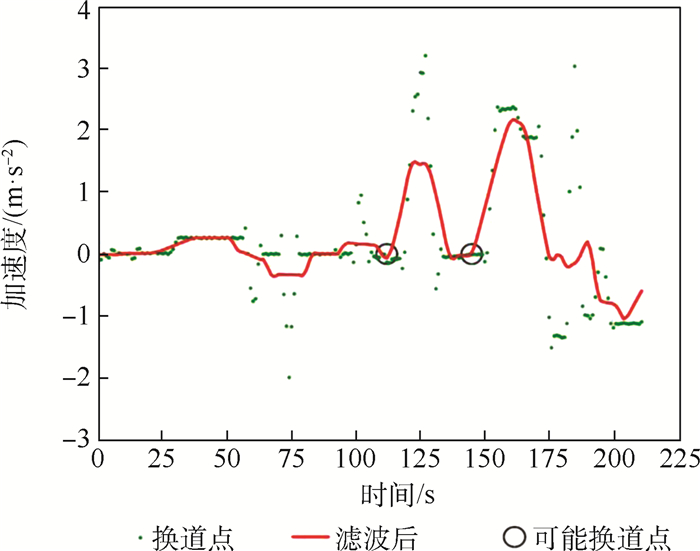
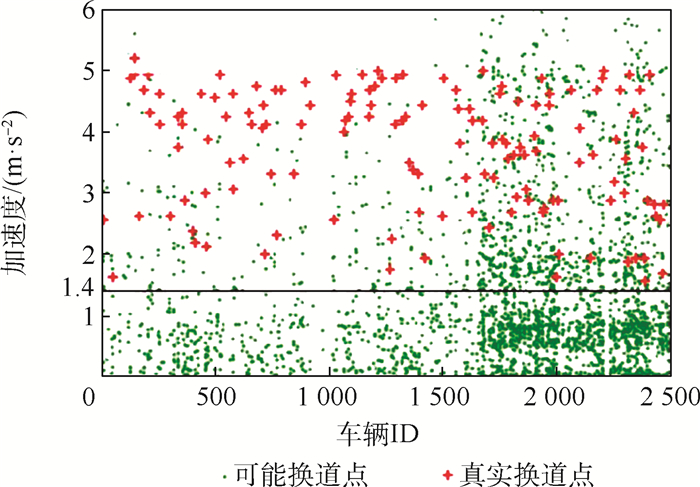
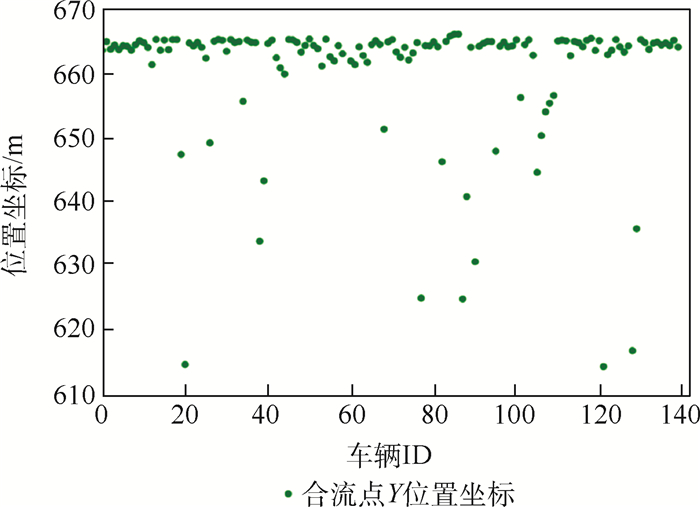
Aiming at the problem of fast-speed and high risk of lane changing behavior on expressway, we focus on the ineviteable, freguent and serve mandatory lane-changing behaviors to improve the lane-changing model based on gated recurrent unit (GRU), and predict the decision-making behaviors of mandatony lane-changing. To verify the effectiveness of the model, adopt the next generation simulation (NGSIM) data as the training set and test set of the model. From this data, the lateral acceleration threshold is obtained to screen out the phenomenon of lateral swing of vehicles. The experimental results indicate that the optimized model could determine the location of mandatory lane change with an accuracy of 96.01%. The accuracy of the model is improved by 3.67% compared with the LSTM model, and is improved by 7.31% compared with the naive Bayes network.
| [1] |
WOLFRAM S. Theory and application of cellular automata[M]. Singapore: World Scientific, 1986.
|
| [2] |
NAGEL K, SCHRECKENBERG M. A cellular automaton model for freeway traffic[J]. Journal De Physique I, 1992, 2(12): 2221-2229. doi: 10.1051/jp2:1992262
|
| [3] |
CHOWDHURY D, WOLF D E, SCHRECKENBERG M. Particle hopping models for two-lane traffic with two kinds of vehicles: Effects of lane-changing rules[J]. Physics A: Statistical Mechanics and its Applications, 1997, 235(3): 417-439.
|
| [4] |
GIPPS P G. A model for the structure of lane-changing decisions[J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. doi: 10.1016/0191-2615(86)90012-3
|
| [5] |
LEE G. Modeling gap acceptance at freeway merges[D]. Cambridge: MIT, 2006.
|
| [6] |
HIDAS P. Modeling lane changing and merging in microscopic traffic simulation[J]. Transportation Research Part C: Emerging Technologies, 2002, 10(5): 351-371.
|
| [7] |
BOXILL S A, YU L. An evaluation of traffic simulation models for supporting ITS[D]. Houston: Texas Szouthern University, 2000.
|
| [8] |
TALEBPOUR A, MAHMASSANI H S, HAMDAR S H. Modeling lane-changing behavior in a connected environment: A game theory approach[J]. Transportation Research Procedia, 2015, 7: 420-440. doi: 10.1016/j.trpro.2015.06.022
|
| [9] |
MENG F L, SU J Y, LIU C J, et al. Dynamic decision making in lane change: Game theory with receding horizon[C]//2016 UKACC 11th International Conference on Control. Piscataway: IEEE Press, 2016: 1-6.
|
| [10] |
NILSSON J, SJÖBERG J. Strategic decision making for automated driving on two-lane, one way roads using model predictive control[C]//2013 Intelligent Vehicles Symposium (IV). Piscataway: IEEE Press, 2013: 1253-1258.
|
| [11] |
WANG Y, ZHANG D, LIU Y, et al. Enhancing transportation systems via deep learning: A survey[J]. Transportation Research Part C: Emerging Technologies, 2019, 99: 144-163. doi: 10.1016/j.trc.2018.12.004
|
| [12] |
DING C, WANG W, WANG X, et al. A neural network model for driver's lane-changing trajectory prediction in urban traffic flow[J]. Mathematical Problems in Engineering, 2013, 2013: 967358.1-967358.8.
|
| [13] |
LIU Y, WANG X, LI L, et al. A novel lane change decision-making model of autonomous vehicle based on support vector machine[J]. IEEE Access, 2019, 7: 26543-26550. doi: 10.1109/ACCESS.2019.2900416
|
| [14] |
邱小平, 刘亚龙, 马丽娜, 等. 基于贝叶斯网络的车辆换道模型[J]. 交通运输系统工程与信息, 2015, 15(5): 67-73.
QIU X P, LIU Y L, MA L N, et al. Vehicle lane change model based on Bayesian network[J] Transportation Systems Engineering and Information, 2015, 15(5): 67-73(in Chinese).
|
| [15] |
HUANG X, SUN J, SUN J. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 346-362. doi: 10.1016/j.trc.2018.07.022
|
| [16] |
HOU Y, EDARA P, SUN C. Modeling mandatory lane changing using Bayes classifier and decision trees[J]. Intelligent Transportation Systems, 2014, 15(2): 647-655.
|
| [17] |
ZHENG J, SUZUKI K, FUJITA M. Predicting driver's lane-changing decisions using a neural network model[J]. Simulation Modelling Practice and Theory, 2014, 42: 73-83. doi: 10.1016/j.simpat.2013.12.007
|
| [18] |
CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[EB/OL]. (2014-09-03)[2020-11-01].
|
| [19] |
FU R, ZHANG Z, LI L. Using LSTM and GRU neural network methods for traffic flow prediction[C]//2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC). Piscataway: IEEE Press, 2016: 324-328.
|
| [20] |
XIE D F, FANG Z Z, JIA B, et al. A data-driven lane-changing model based on deep learning[J]. Transportation Research Part C: Emerging Technologies, 2019, 106: 41-60. doi: 10.1016/j.trc.2019.07.002
|
| [21] |
吴江玲, 张生瑞, AMIT K S, 等. 高速公路强制换道持续时间半参数生存分析[J]. 浙江大学学报(工学版), 2017, 51(11): 2215-2221. doi: 10.3785/j.issn.1008-973X.2017.11.016
WU J L, ZHANG S R, AMIT K S, et al. Semi-parametric survival analysis of mandatory lane changing duration of freeways[J] Journal of Zhejiang University(Engineering Science), 2017, 51(11): 2215-2221(in Chinese). doi: 10.3785/j.issn.1008-973X.2017.11.016
|


Figures(13) / Tables(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Tian Benjian, Xiong Junjiang. Fatigue life estimation of riveted joints subjected to asymmetrical loading[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(12): 1649-1653. (in Chinese)





 DownLoad:
DownLoad: