| Citation: | DUAN B,YANG S,LI A J. Design of LPV control law for unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):879-890 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0340

|
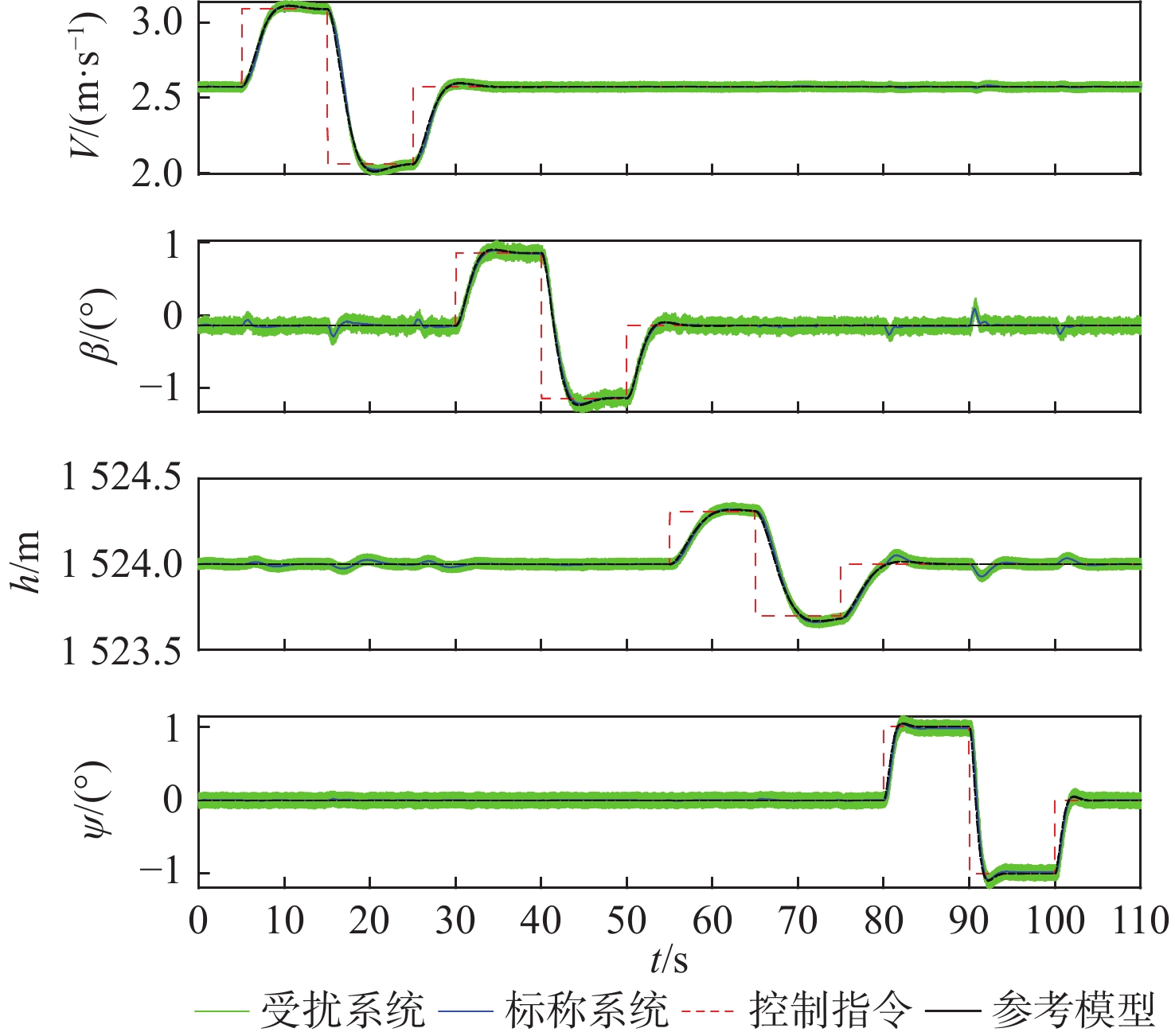
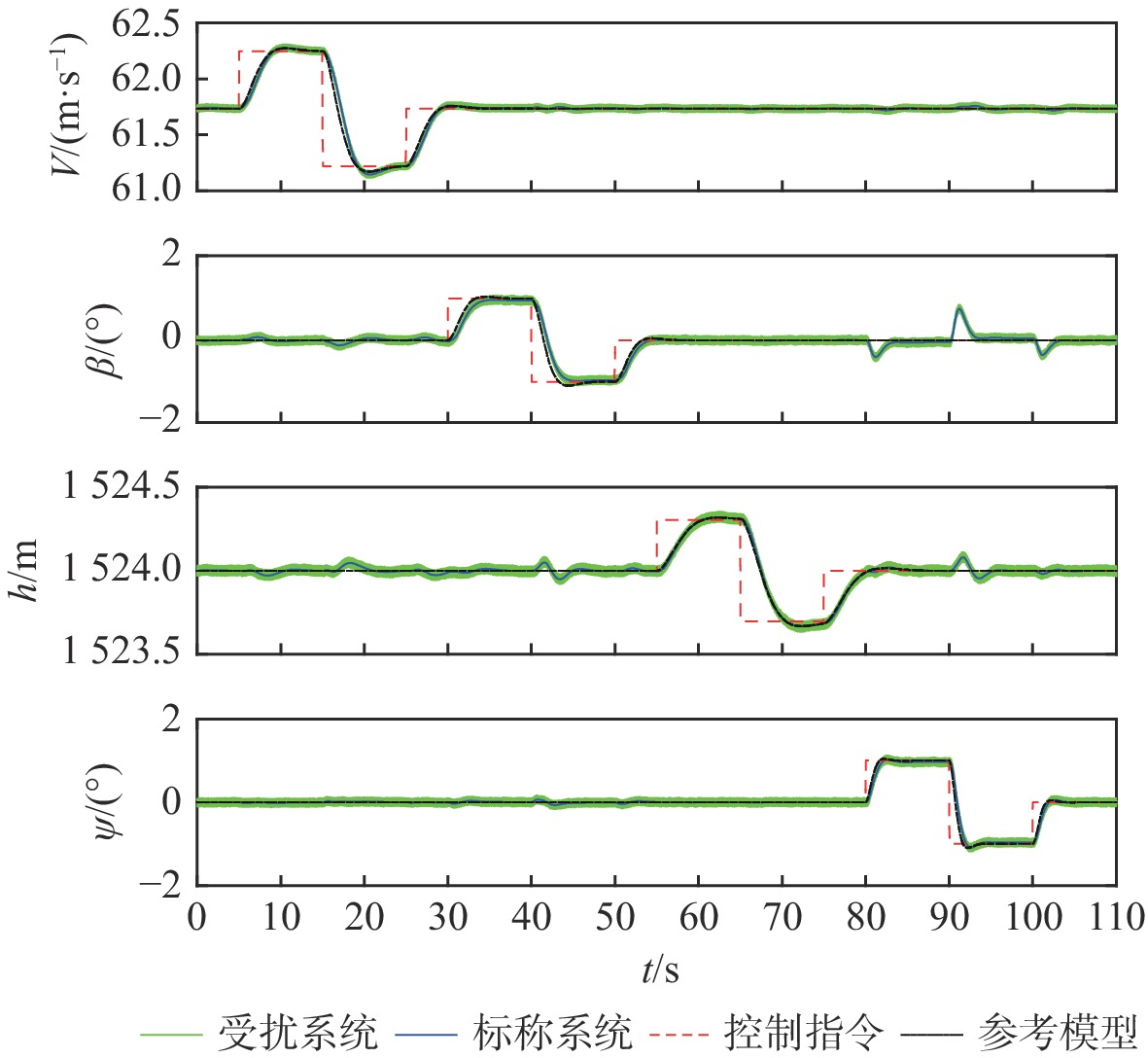
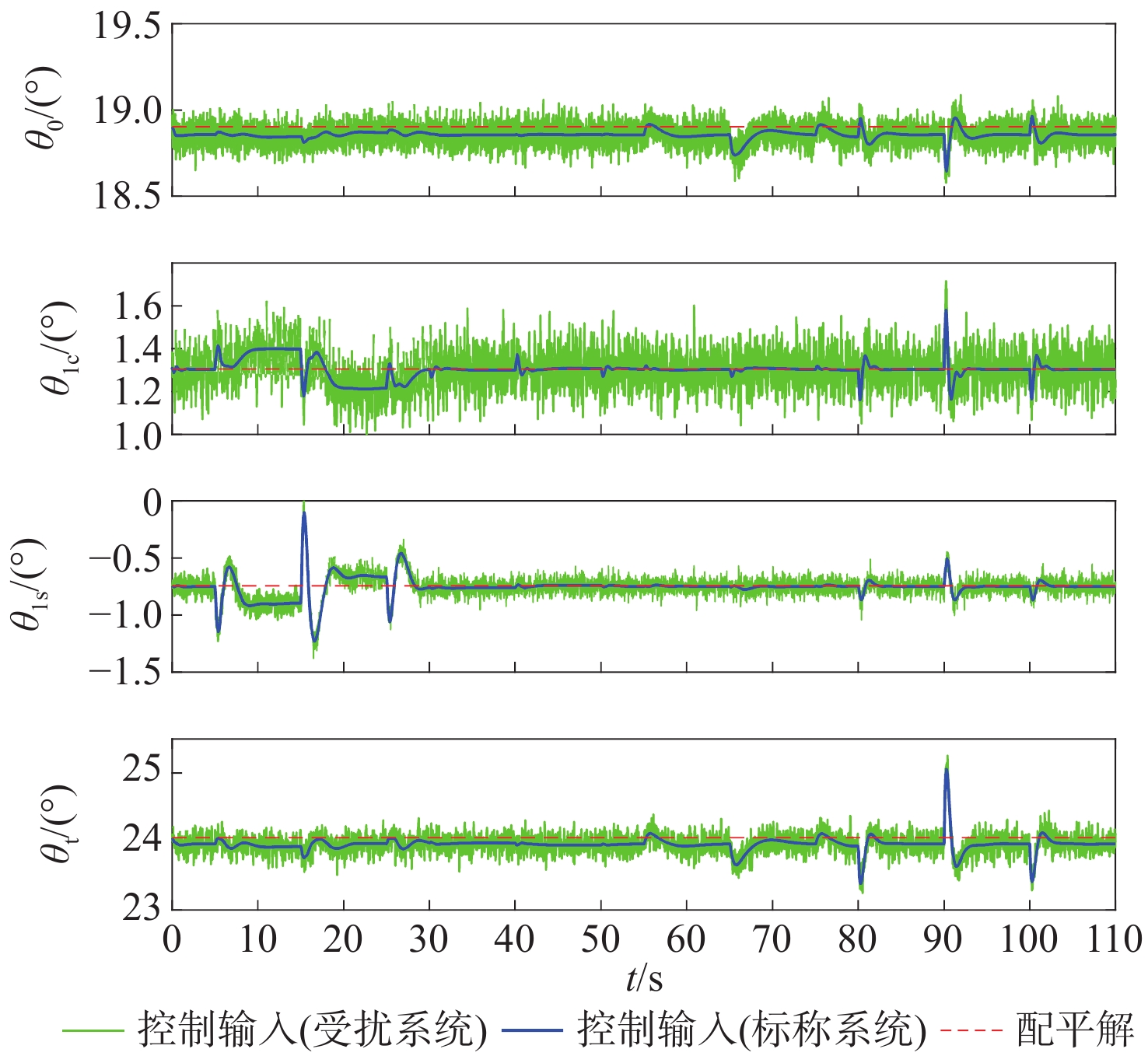
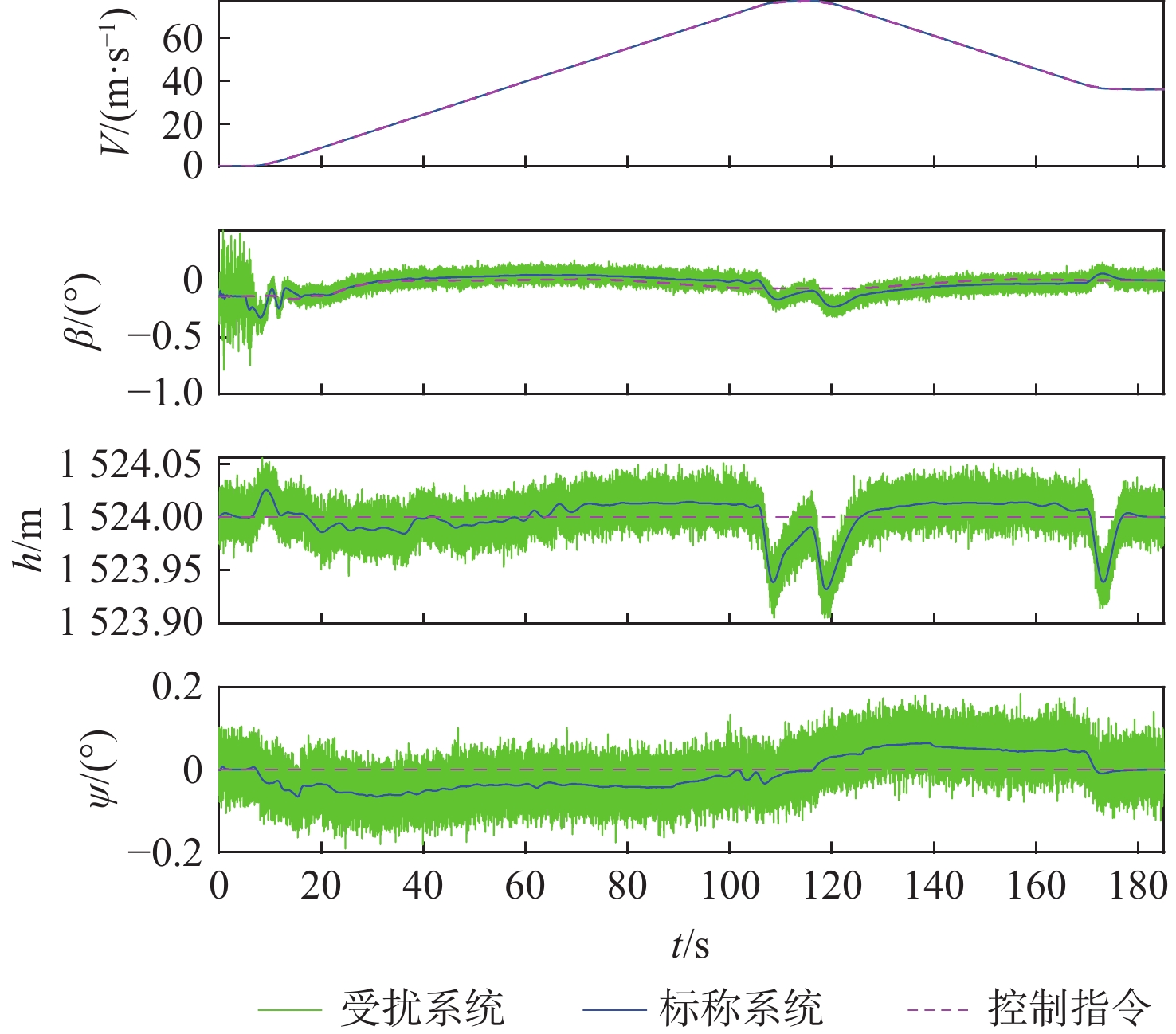
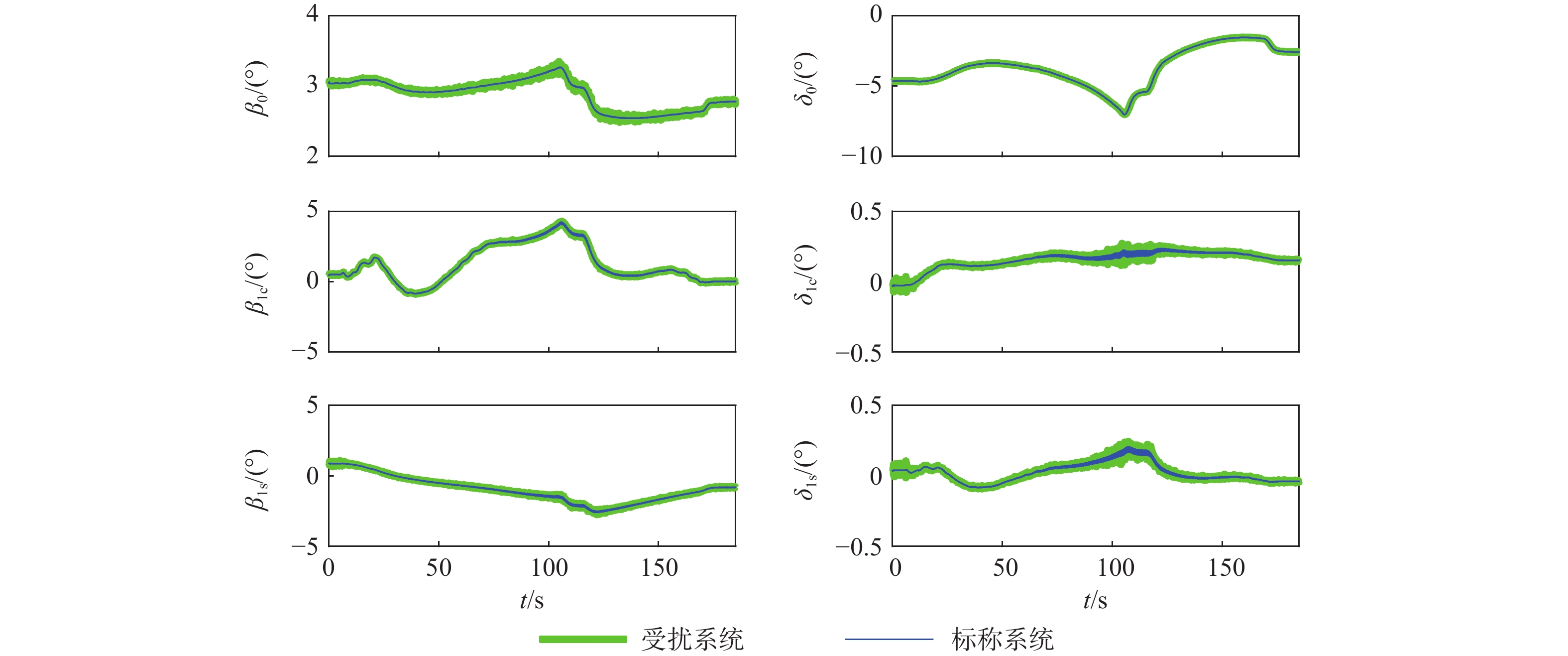
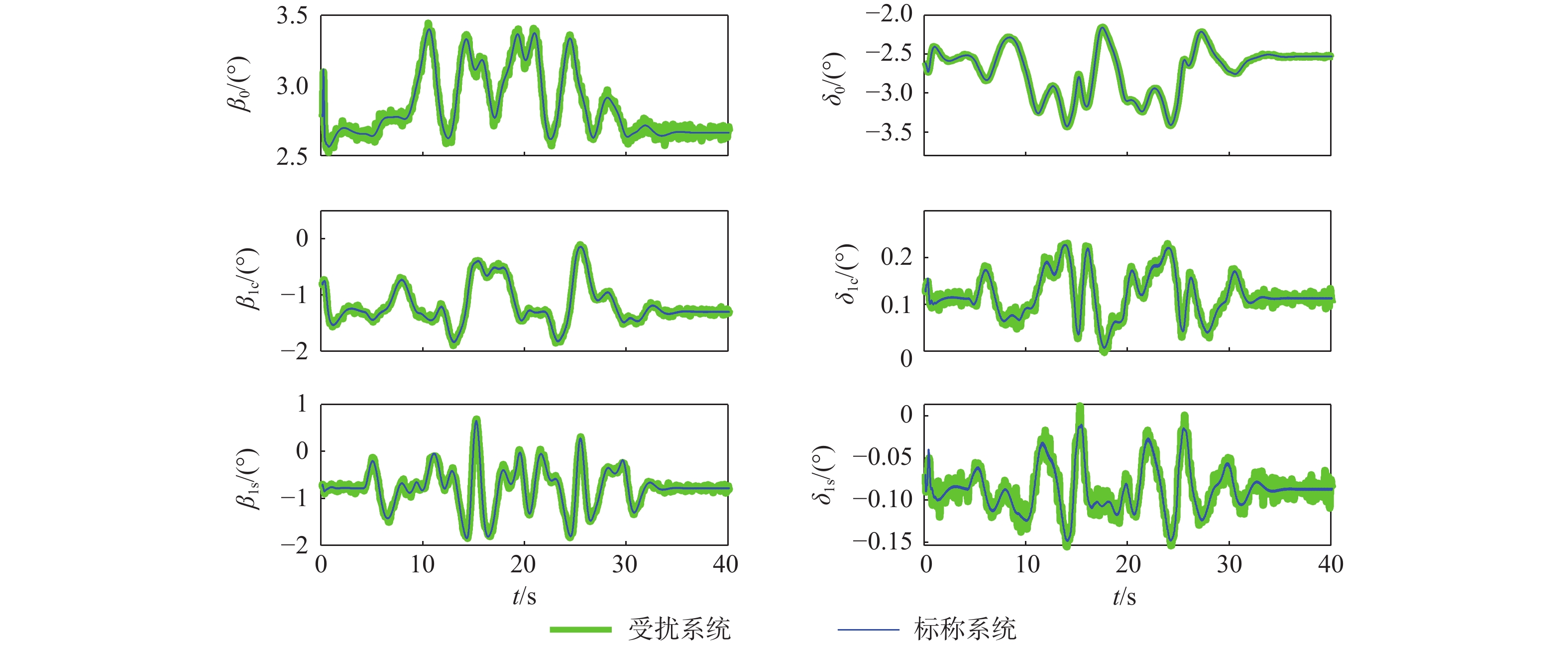
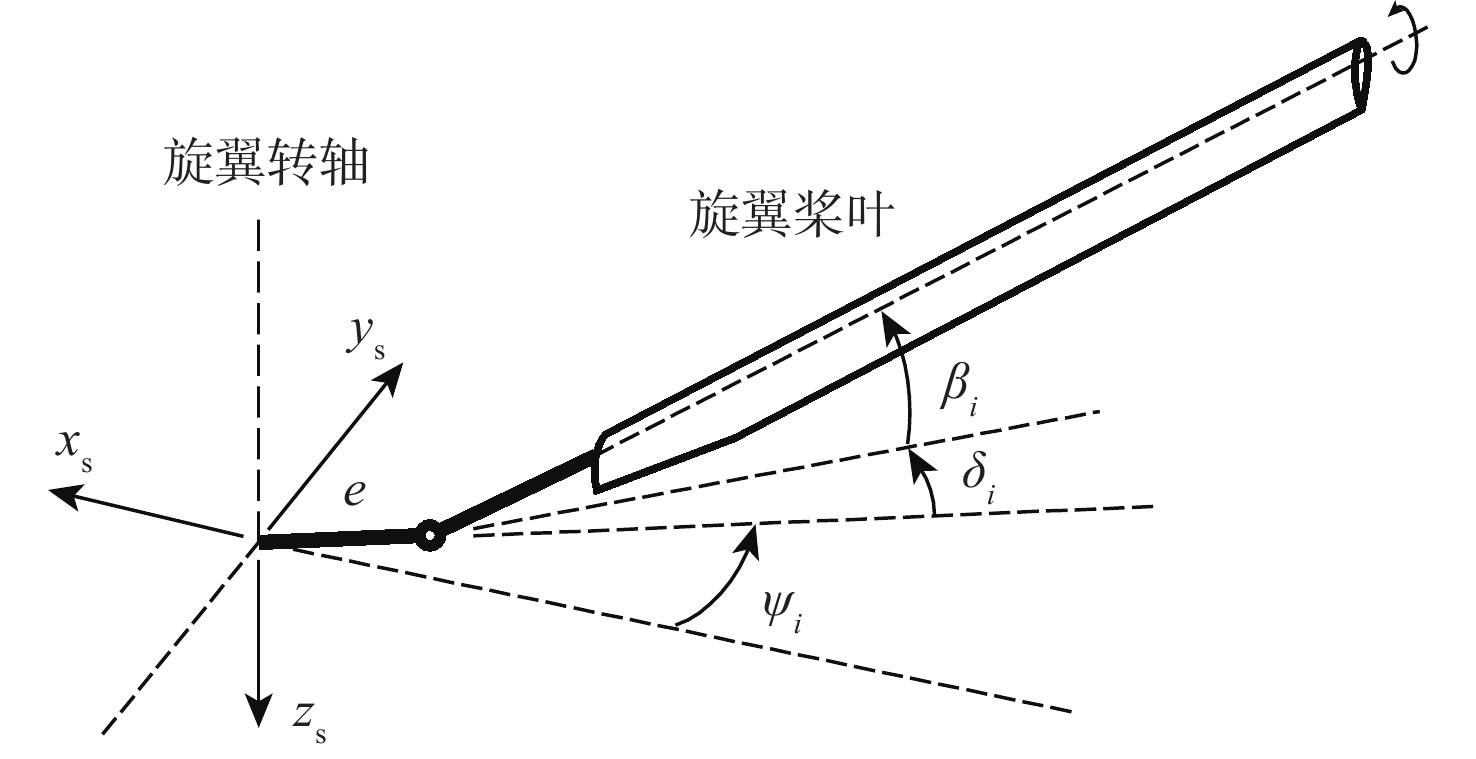
An LPV control scheme is proposed to design integrated flight control laws for unmanned helicopters. The LPV control law achieves explicit model following performance for an unmanned helicopter in velocity, sideslip angle, altitude, and yaw angle control channels, leading to desired flight path control performance. A nonlinear mathematical model is developed for an unmanned helicopter to take into consideration the coupling among rotor blade flapping and lead-lag dynamics, rotor inflow dynamics, and fuselage dynamics. Since helicopter dynamics is periodic, harmonic balance method is employed to conduct trim and model linearization, leading to an LPV model used to perform LPV control design in a velocity envelope. Parameters of the LPV control law are determined by solving a convex optimization problem. Numerical simulations are conducted to examine the performance of the LPV control law based on typical helicopter maneuvers under sensor noise. Results show that the proposed law has good performance and robustness in helicopter velocity envelope, satisfying performance standards of each maneuver of an unmanned helicopter.

| [1] |
TAKAHASHI M D, FUJIZAWA B T, LUSARDI J A, et al. Autonomous guidance and flight control on a partial-authority Black Hawk helicopter[C]//Proceedings of AIAA Aviation Forum. Reston: AIAA, 2020: 1-39.
|
| [2] |
TAKAHASHI M D, WHALLEY M S, FLETCHER J W, et al. Development and flight testing of a flight control law for autonomous operations research on the RASCAL JUH-60A[J]. Journal of the American Helicopter Society, 2014, 59: 032007.
|
| [3] |
HALBE O, HAJEK M. Robust helicopter sliding mode control for enhanced handling and trajectory following[J]. Journal of Guidance, Control, and Dynamics, 2020, 43(10): 1805-1821. doi: 10.2514/1.G005183
|
| [4] |
GREER W B, SULTAN C. Infinite horizon model predictive control tracking application to helicopters[J]. Aerospace Science and Technology, 2020, 98: 105675. doi: 10.1016/j.ast.2019.105675
|
| [5] |
GREER W B, SULTAN C. Shrinking horizon model predictive control method for helicopter-ship touchdown[J]. Journal of Guidance, Control, and Dynamics, 2020, 43(5): 884-900. doi: 10.2514/1.G004374
|
| [6] |
陈南宇, 蒙志君, 黄俊. 无人直升机飞行品质要求探讨[J]. 北京航空航天大学学报, 2016, 42(2): 337-344. doi: 10.13700/j.bh.1001-5965.2015.0125
CHEN N Y, MENG Z J, HUANG J. Research on flying quality of unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(2): 337-344(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0125
|
| [7] |
吴超, 王浩文, 姜辰, 等. 基于LADRC的直升机姿态解耦控制及参数整定[J]. 北京航空航天大学学报, 2015, 41(11): 2085-2094. doi: 10.13700/j.bh.1001-5965.2014.0710
WU C, WANG H W, JIANG C, et al. LADRC-based attitude decoupling control for helicopter and parameters tuning[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(11): 2085-2094(in Chinese). doi: 10.13700/j.bh.1001-5965.2014.0710
|
| [8] |
汪庆, 王永, 彭程, 等. 直升机两步法抗饱和控制[J]. 北京航空航天大学学报, 2011, 37(7): 888-894. doi: 10.13700/j.bh.1001-5965.2011.07.025
WANG Q, WANG Y, PENG C, et al. Two-step anti-windup control of helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(7): 888-894(in Chinese). doi: 10.13700/j.bh.1001-5965.2011.07.025
|
| [9] |
赵佳, 申功璋, 陈胜功. 基于多点逆模型组的直升机慢切换姿态控制[J]. 北京航空航天大学学报, 2010, 36(7): 798-802. doi: 10.13700/j.bh.1001-5965.2010.07.028
ZHAO J, SHENG G Z, CHEN S G. Helicopter slow switching attitude control based on multiple points inversion models group[J]. Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(7): 798-802(in Chinese). doi: 10.13700/j.bh.1001-5965.2010.07.028
|
| [10] |
RUGH W J, SHAMMA J S. Research on gain scheduling[J]. Automatica, 2000, 36: 1401-1425. doi: 10.1016/S0005-1098(00)00058-3
|
| [11] |
WU F, YANG X H, PACKARD A, et al. Induced L2-norm control for LPV systems with bounded parameter variation rates[J]. International Journal of Robust and Nonlinear Control, 1996, 6: 983-998. doi: 10.1002/(SICI)1099-1239(199611)6:9/10<983::AID-RNC263>3.0.CO;2-C
|
| [12] |
HUGHES H, WU F. H∞ LPV state feedback control for flexible hypersonic vehicle longitudinal dynamics[C]//Proceedings of AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2010: 1-13.
|
| [13] |
SIGTHORSSON D O, SERRANI A, BOLENDER M A, et al. LPV control design for over-actuated hypersonic vehicles models[C]//Proceedings of AIAA Guidance, Navigation, and Control Conference. Reston: AIAA, 2009: 1-24.
|
| [14] |
BALAS G J, FIALHO I, PACK A, et al. On the design of LPV controllers for the F-14 aircraft lateral-directional axis during powered approach[C]//Proceedings of the 1997 American Control Conference. Reston: AIAA, 1997: 123-127.
|
| [15] |
BITTANTI S, CUZZOLA F A, LOVERA M, et al. An LPV-LMI approach to generalised active control of vibrations in helicopters[C]//Proceedings of the 1999 European Control Conference. Piscataway: IEEE Press, 1999: 2783-2788.
|
| [16] |
SUN X D, POSTLETHWAITE I. Affine LPV modelling and its use in gain-scheduled helicopter control[C]//Proceedings of UKACC International Conference on Control. Piscataway: IEEE Press, 1998: 1504-1509.
|
| [17] |
POSTLETHWAITE I, KONSTANTOPOULOS I K, SUN X D, et al. Design, flight simulation, and handling qualities evaluation of an LPV gain-scheduled helicopter flight control system[J]. European Journal of Control, 2000, 6: 553-566. doi: 10.1016/S0947-3580(00)71119-8
|
| [18] |
CHEN R T N, HINDSON W S. Influence of high-order dynamics on helicopter flight-control system bandwidth[J]. Journal of Guidance, Control, and Dynamics, 1986, 9(2): 190-197. doi: 10.2514/3.20089
|
| [19] |
DRYFOOS J B, KOTHMANN B D, MAYO J. An approach to reducing rotor-body coupled roll oscillations on the RAH-66 Comanche using modified roll rate feedback[C]//Proceedings of the American Helicopter Society 55th Annual Forum. Fairfax: AHS, 1999: 1-14.
|
| [20] |
HOWLETT J J. UH-60A Black Hawk engineering simulation program: Volume 1 - mathematical model: NASA CR 166309[R]. Washington, D. C.: NASA, 1981: 5-361.
|
| [21] |
PADFIELD G D. Helicopter flight dynamics[M]. 2nd ed. Oxford: Blackwell Publishing Ltd, 2007: 175-179.
|
| [22] |
STEVENS B L, LEWIS F L, JOHNSON E N. Aircraft control and simulation[M]. 3rd ed. Hoboken: John Wiley & Sons Inc, 2015: 34-45.
|
| [23] |
DUVAL R W. Inertial dynamics of a general purpose rotor model: NASA TM-78557[R]. Washington, D. C.: NASA, 1979: 6-34.
|
| [24] |
PITT D M, PETERS D A. Theoretical prediction of dynamics inflow derivatives[J]. Vertica, 1981, 5(1): 21-34.
|
| [25] |
BALLIN M G. Validation of a real-time engineering simulation of the UH-60A helicopter: NASA TM-88360[R]. Washington, D. C.: NASA, 1987: 23-26.
|
| [26] |
KIM F D, CELI R, TISCHLER M B. Forward flight trim and frequency response validation of a helicopter simulation model[J]. Journal of Aircraft, 1993, 30(6): 854-863. doi: 10.2514/3.46427
|
| [27] |
NOCEDAL J, WRIGHT S J. Numerical optimization[M]. Berlin: Springer, 2006: 136-142.
|
| [28] |
JOHNSON W. Rotorcraft aeromechanics[M]. New York: Cambridge University Press, 2013: 549-562.
|
| [29] |
MARCOS A, BALAS G J. Development of linear-parameter-varying models for aircraft[J]. Journal of Guidance, Control, and Dynamics, 2004, 27(2): 218-228. doi: 10.2514/1.9165
|
| [30] |
AKARIAN P, ADAMS R J. Advanced gain-scheduling techniques for uncertain systems[J]. IEEE Transactions on Control System Technology, 1998, 6(1): 21-32. doi: 10.1109/87.654874
|
| [31] |
BASKETT B J. Aeronautical design standard performance specification handling qualities requirements for military rotorcraft: ADS-33E-PRF[S]. Alabama: United States Army Aviation and Missile Command, 2000: 35-36.
|
Figures(17)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: