| Citation: | DENG B H,XU J F. Active disturbance rejection control of attitude of compound unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3100-3107 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0788

|
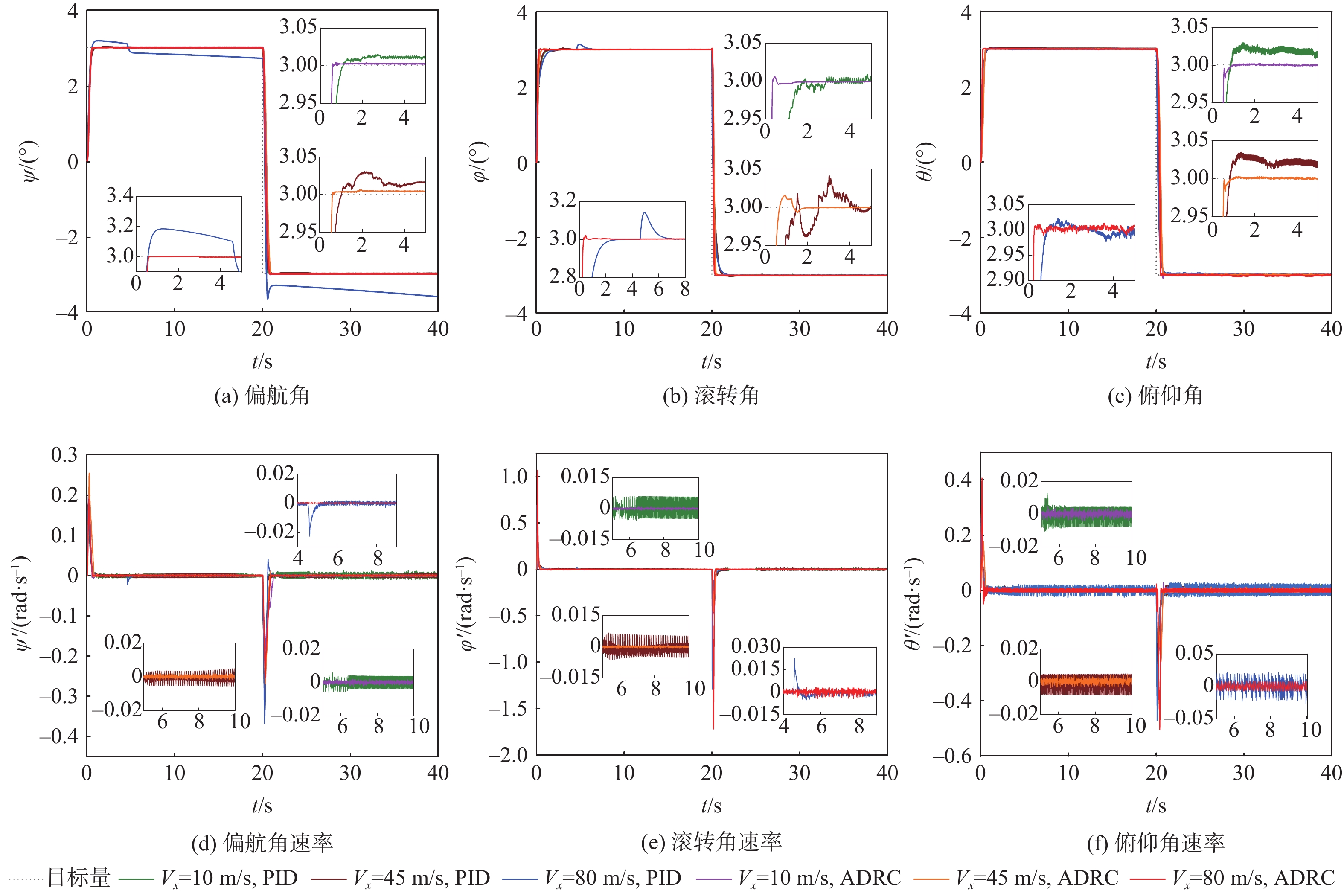
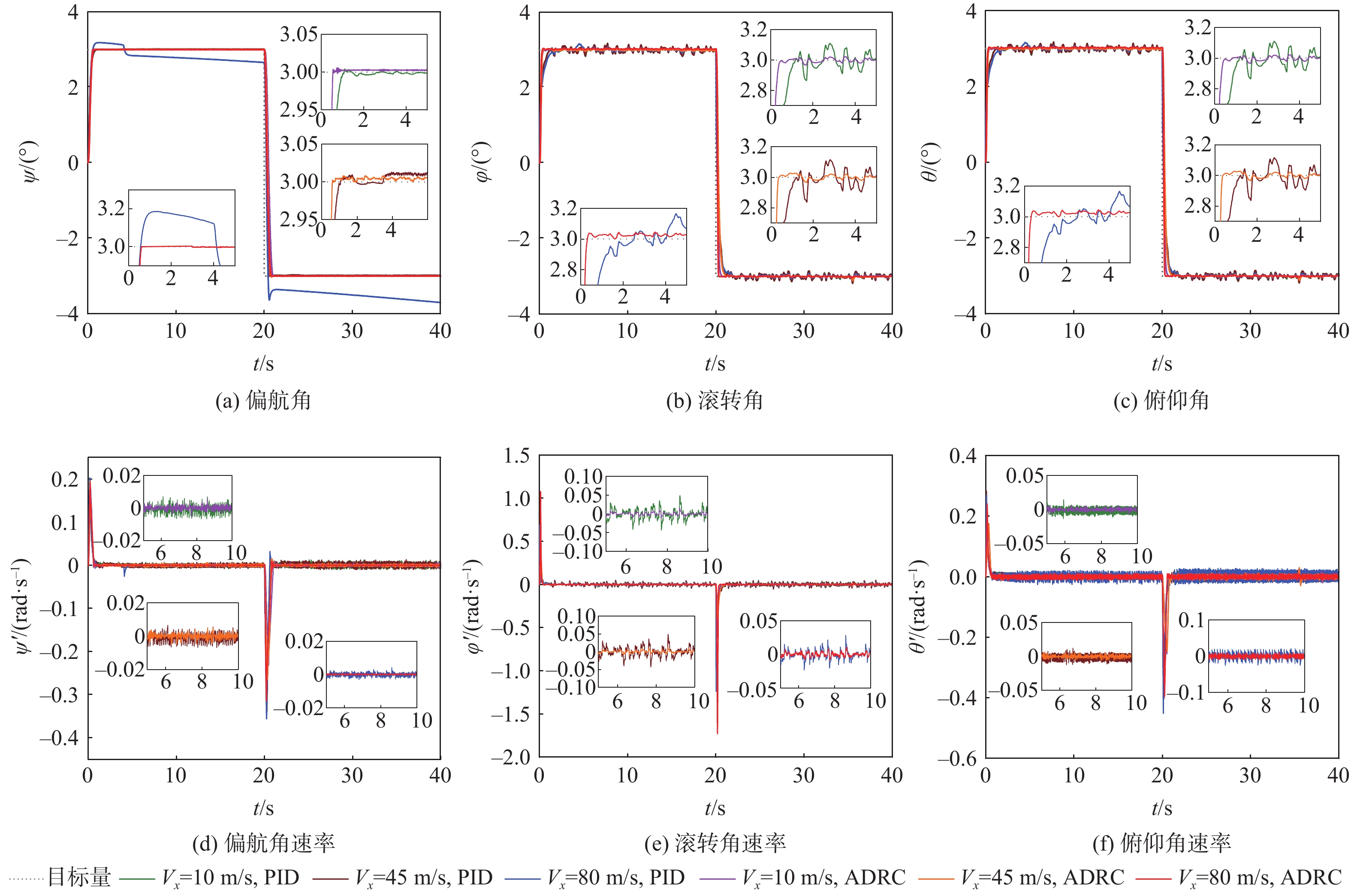
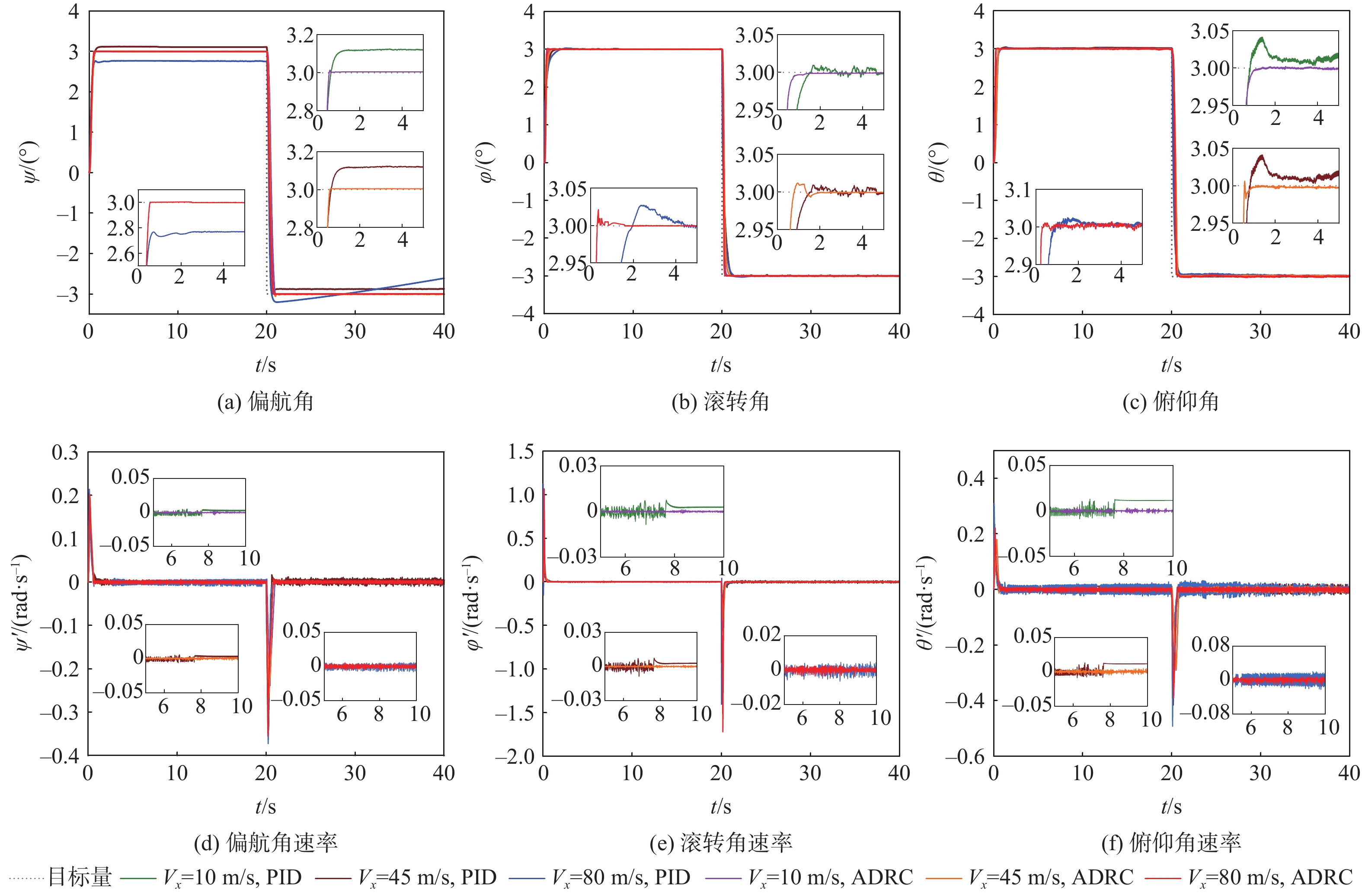
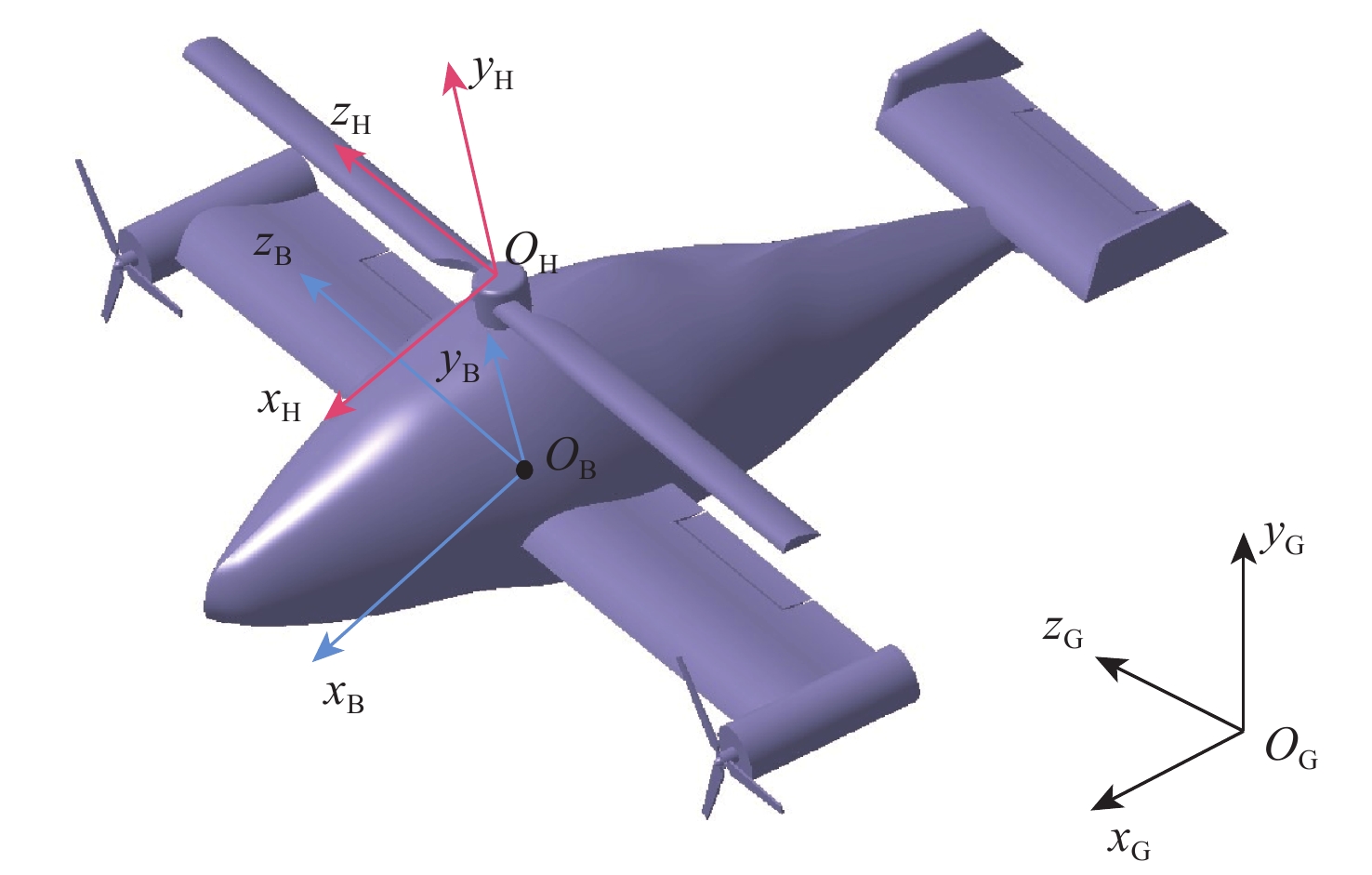
A compound unmanned helicopter is a non-linear and strongly coupled controlled plant with multiple redundant control inputs, and with its response varying with input strategies. The unmodeled internal structure dynamics and unknown external disturbances of the compound unmanned helicopter cause great difficulties in flight control system design. The attitude control law design is crucial for the helicopter to fly stably within the entire flight envelope. Based on a mathematical model for motion characteristics, the control strategies for the helicopter are designed for different flight modes, and the Simulink simulation model of the controlled plant is developed. The active disturbance rejection control (ADRC) of attitude is designed, and the comparison between the attitude ADRC and proportional-integral-derivative (PID) controller is conducted. The control effect of the attitude ADRC is better than that of the attitude PID controller. The simulation demonstrates that the anti-interference and robust performance of the ADRC meet the attitude control requirements for the compound unmanned helicopter, and that the quick and stable flight of the helicopter can be guaranteed for different flight modes.

| [1] |
MUSIAL M, BRANDENBURG U W, HOMMEL G. Cooperative autonomous mission planning and execution for the flying robot[J]. Intelligent Autonomous Systems, 2008, 34: 636-643.
|
| [2] |
王小青. 无人直升机建模与控制技术研究[D]. 南京: 南京航空航天大学, 2009: 64-100.
WANG X Q. Research on modeling and control technology of unmanned helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2009, 64-100(in Chinese).
|
| [3] |
IFASSIOUEN H, GUISSER M, MEDROMI H. Robust nonlinear control of a miniature autonomous helicopter using sliding mode control structure[J]. Proceedings of World Academy of Science Engineering, 2007, 26: 101-106.
|
| [4] |
HALBE O, HAJEK M. Robust helicopter sliding mode control for enhanced handling and trajectory following[C]//Proceedings of the AIAA Scitech 2020 Forum. Reston: AIAA, 2020:1828.
|
| [5] |
GUO J, XIAN B. Robust adaptive control design for rotorcraft unmanned aerial vehicles based on sliding mode approach[J]. Transactions of Tianjin University, 2014, 20(6): 393-401. doi: 10.1007/s12209-014-2423-3
|
| [6] |
GHOMMAM J, SAAD M. Autonomous landing of a quadrotor on a moving platform[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1504-1519. doi: 10.1109/TAES.2017.2671698
|
| [7] |
WANG X Y, YU X, LI S H. Composite block backstepping trajectory tracking control for disturbed unmanned helicopters[J]. Aerospace Science and Technology, 2019, 85: 386-398. doi: 10.1016/j.ast.2018.12.019
|
| [8] |
HAN J Q. From PID to active disturbances rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. doi: 10.1109/TIE.2008.2011621
|
| [9] |
吴超, 王浩文, 张玉文, 等. 基于LADRC的无人直升机轨迹跟踪[J]. 航空学报, 2015, 36(2): 473-483.
WU C, WANG H W, ZHANG Y W, et al. LADRC based trajectory tracking of unmanned helicopter[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(2): 473-483(in Chinese).
|
| [10] |
张磊. 基于ADRC的无人直升机飞行控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2017: 41-61.
ZHANG L. Research on flight control method of unmanned helicopter based on ADRC[D]. Harbin: Harbin Engineering University, 2017: 41-61(in Chinese).
|
| [11] |
SHEN S Y, XU J F. Adaptive neural network-based active disturbance rejection flight control of an unmanned helicopter[J]. Aerospace Science and Technology, 2021, 119: 107062.
|
| [12] |
曹飞, 陈铭. 一种单旋翼复合式直升机性能特性[J]. 北京航空航天大学学报, 2016, 42(4): 772-779. doi: 10.13700/j.bh.1001-5965.2015.0267
CAO F, CHEN M. The utility model relates to a single rotor compound helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(4): 772-779(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0267
|
| [13] |
郑峰婴, 刘龙武, 程月华, 等. 复合式旋翼飞行器多目标控制分配策略[J]. 航空学报, 2019, 40(6): 322727.
ZHENG F Y, LIU L W, CHENG Y H, et al. Multi-objective control assignment strategy for complex rotorcraft[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(6): 322727(in Chinese).
|
| [14] |
王适存. 直升机空气动力学[M]. 南京: 南京航空航天大学航空专业教材编审组, 1985: 59-89.
WANG S C. Helicopter aerodynamics[M]. Nanjing: Nanjing University of Aeronautics and Astronautics, 1985: 59-89(in Chinese).
|
| [15] |
高正, 陈仁良. 直升机飞行动力学[M]. 北京: 科学出版社, 2003: 43-51.
GAO Z, CHEN R L. Helicopter flight dynamics[M]. Beijing: Science Press, 2003: 43-51(in Chinese).
|
| [16] |
韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 46-262.
HAN J Q. Active disturbance rejection control technology: The technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 46-262(in Chinese).
|
Figures(7) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: