| Citation: | LI C,HE Y Z,HU Y. Characteristic model control of nutation target contact detumbling[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):2977-2988 (in Chinese) doi: 10.13700/j.bh.1001-5965.2021.0798

|
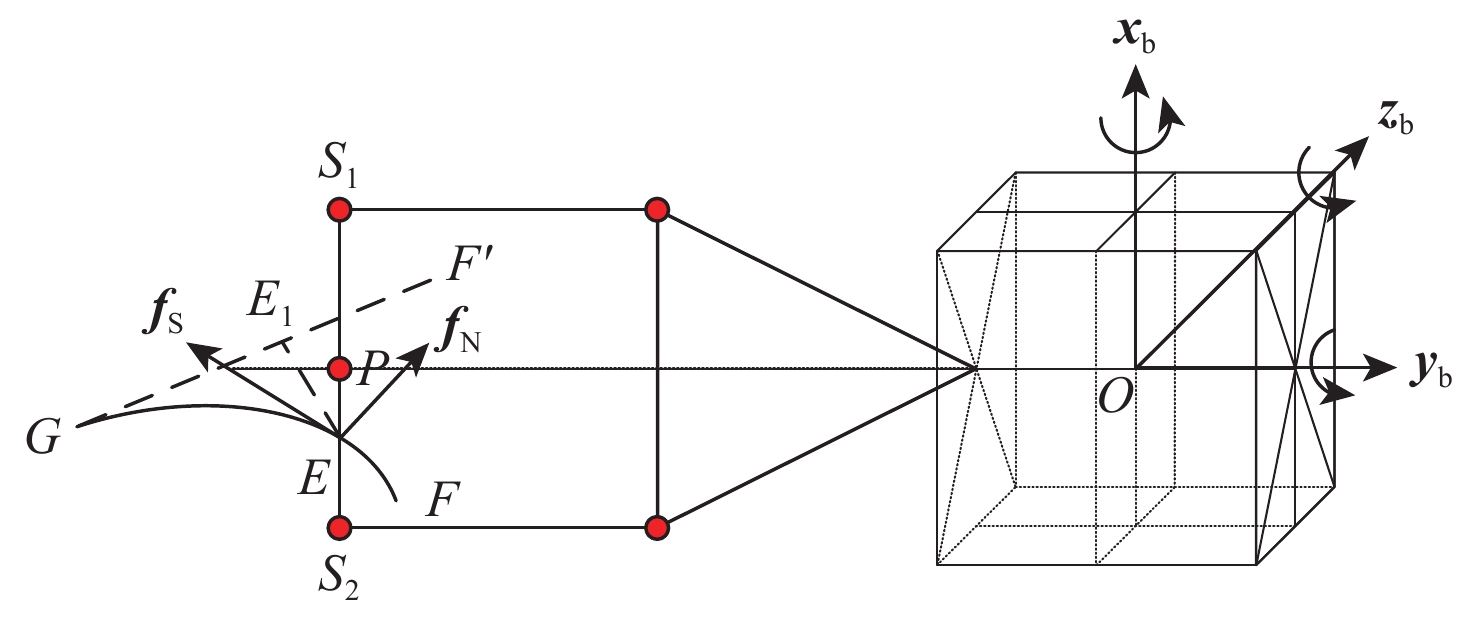
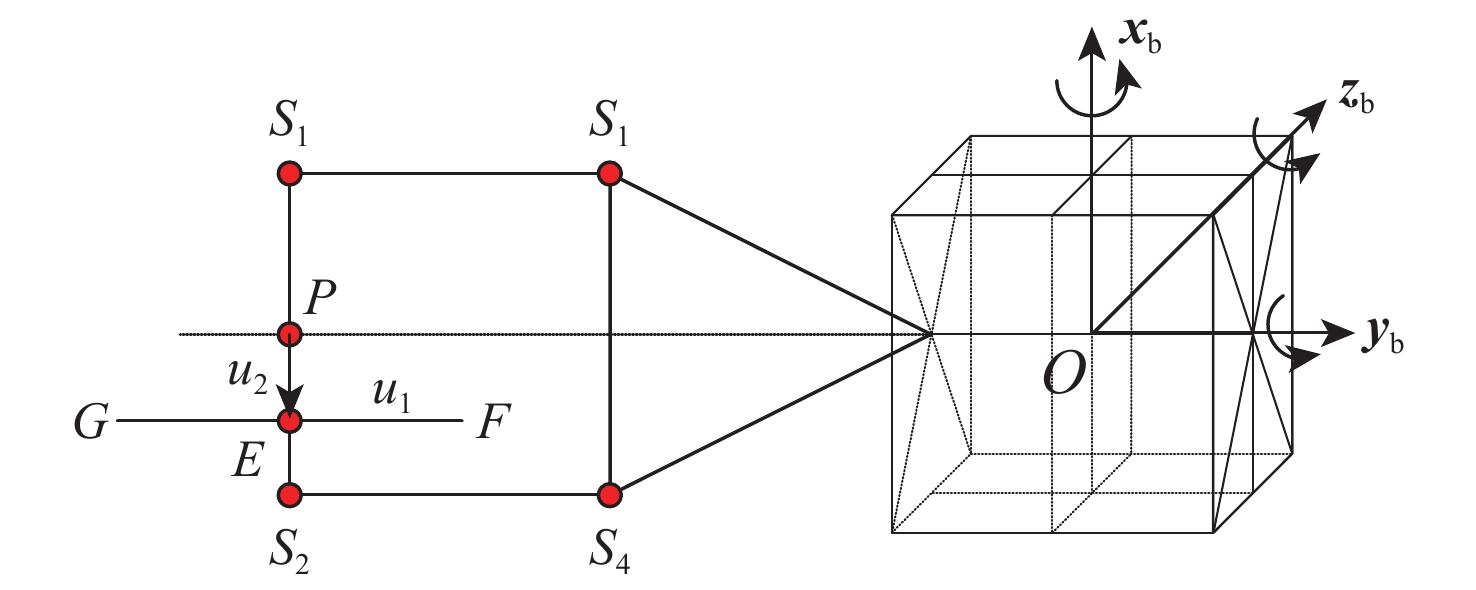
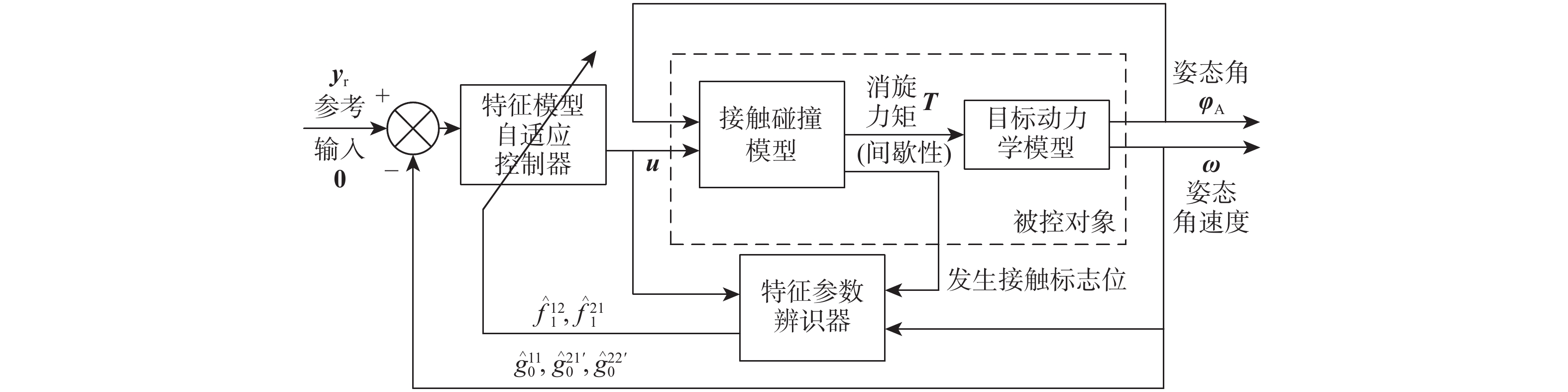
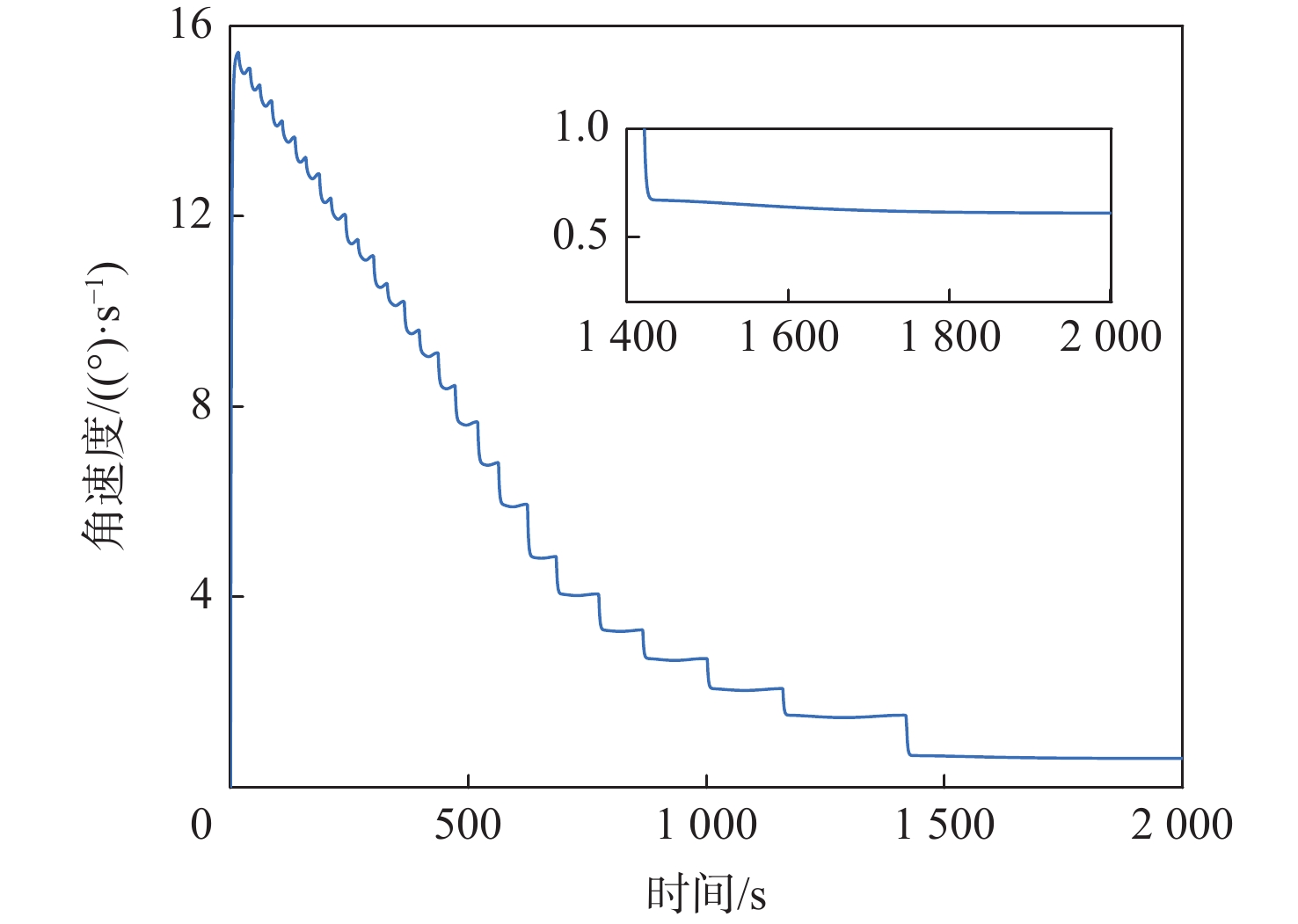
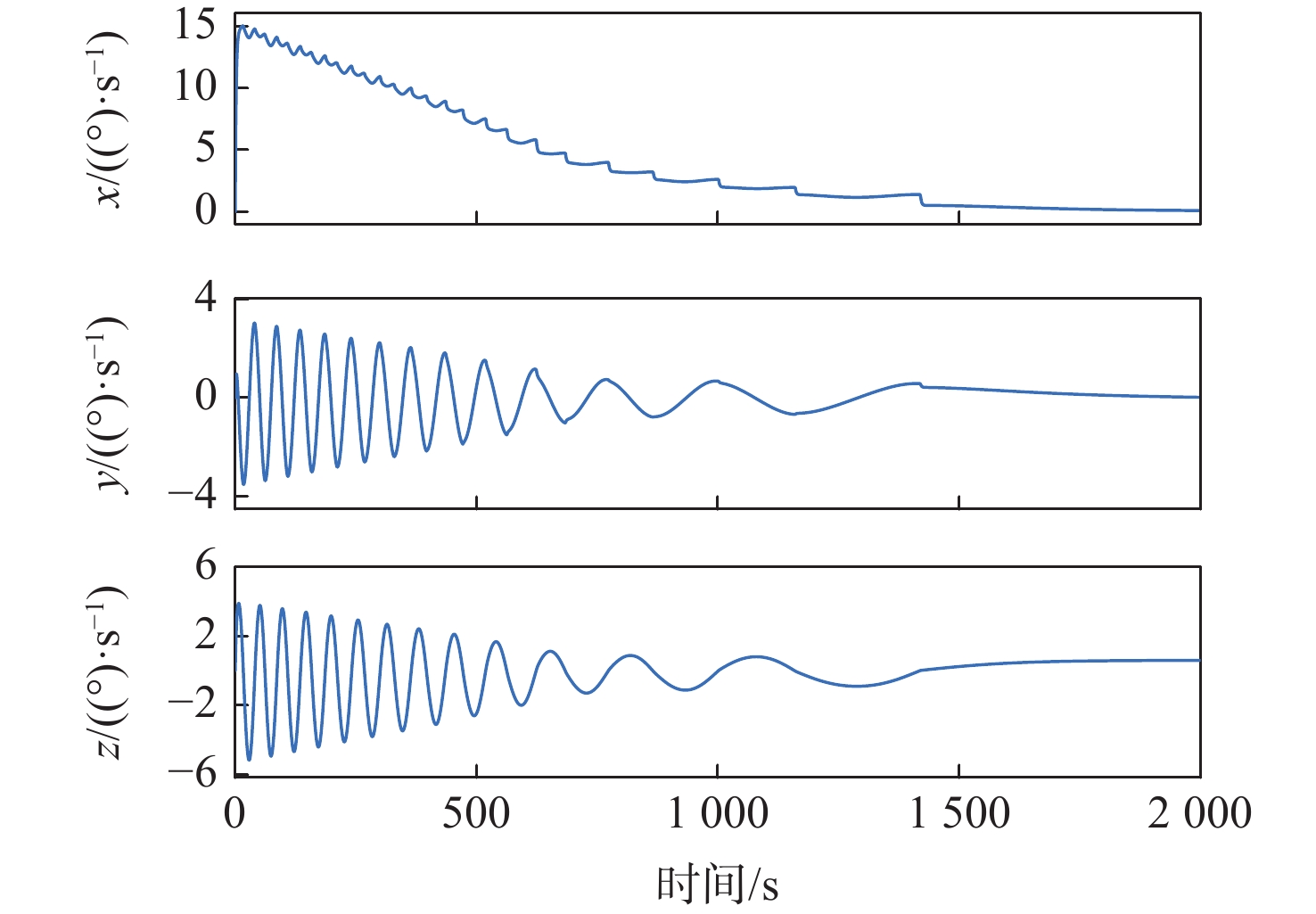
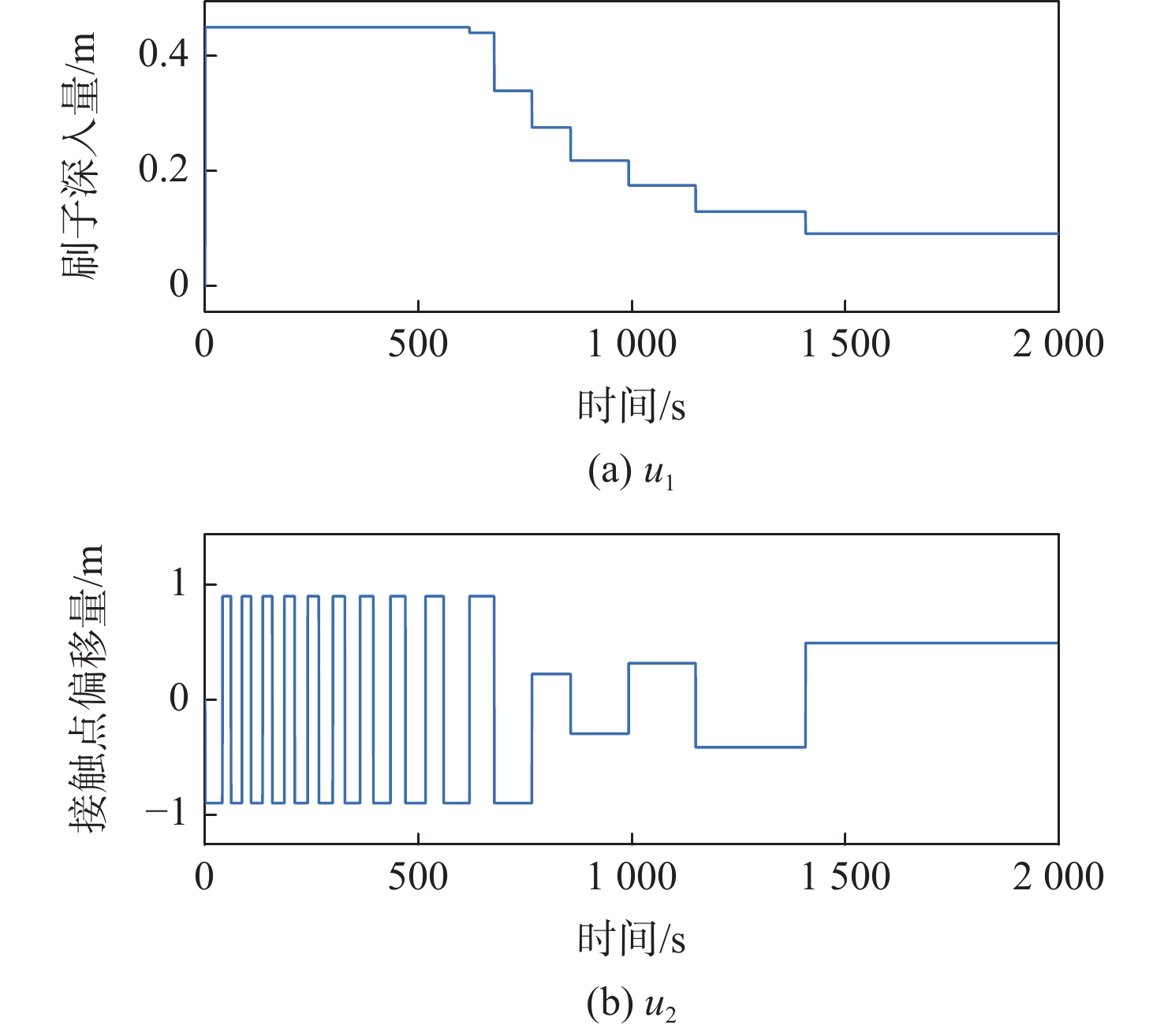
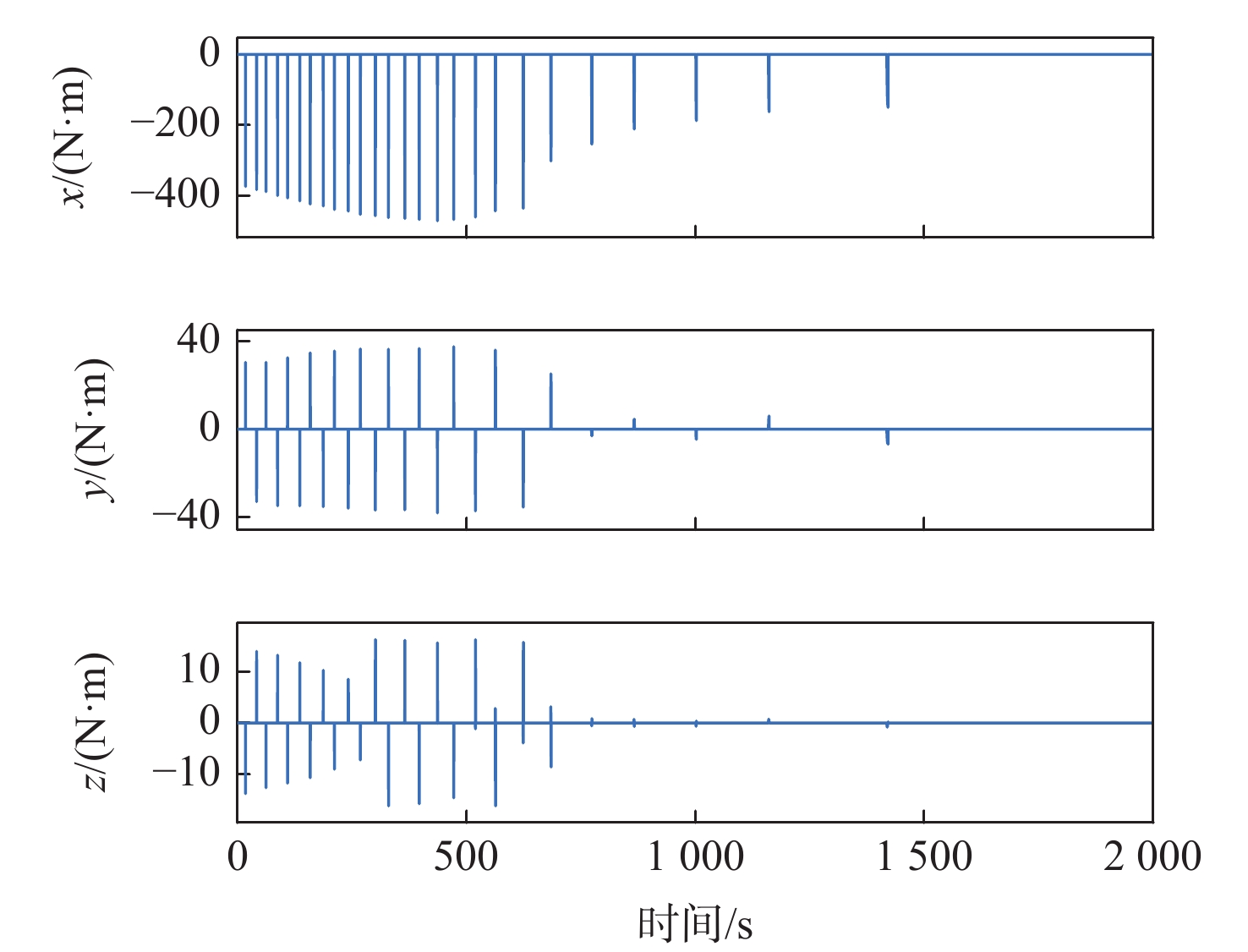
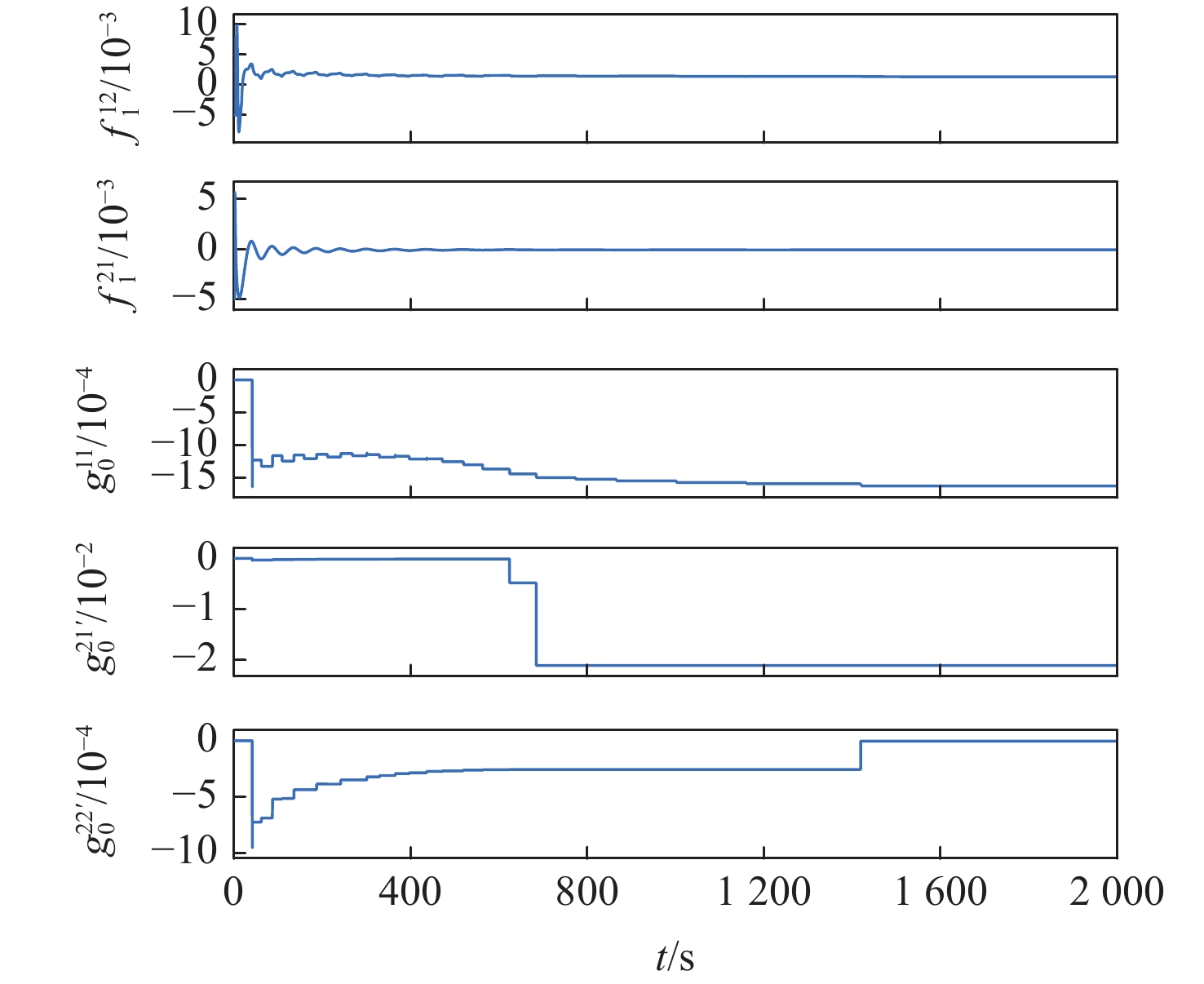
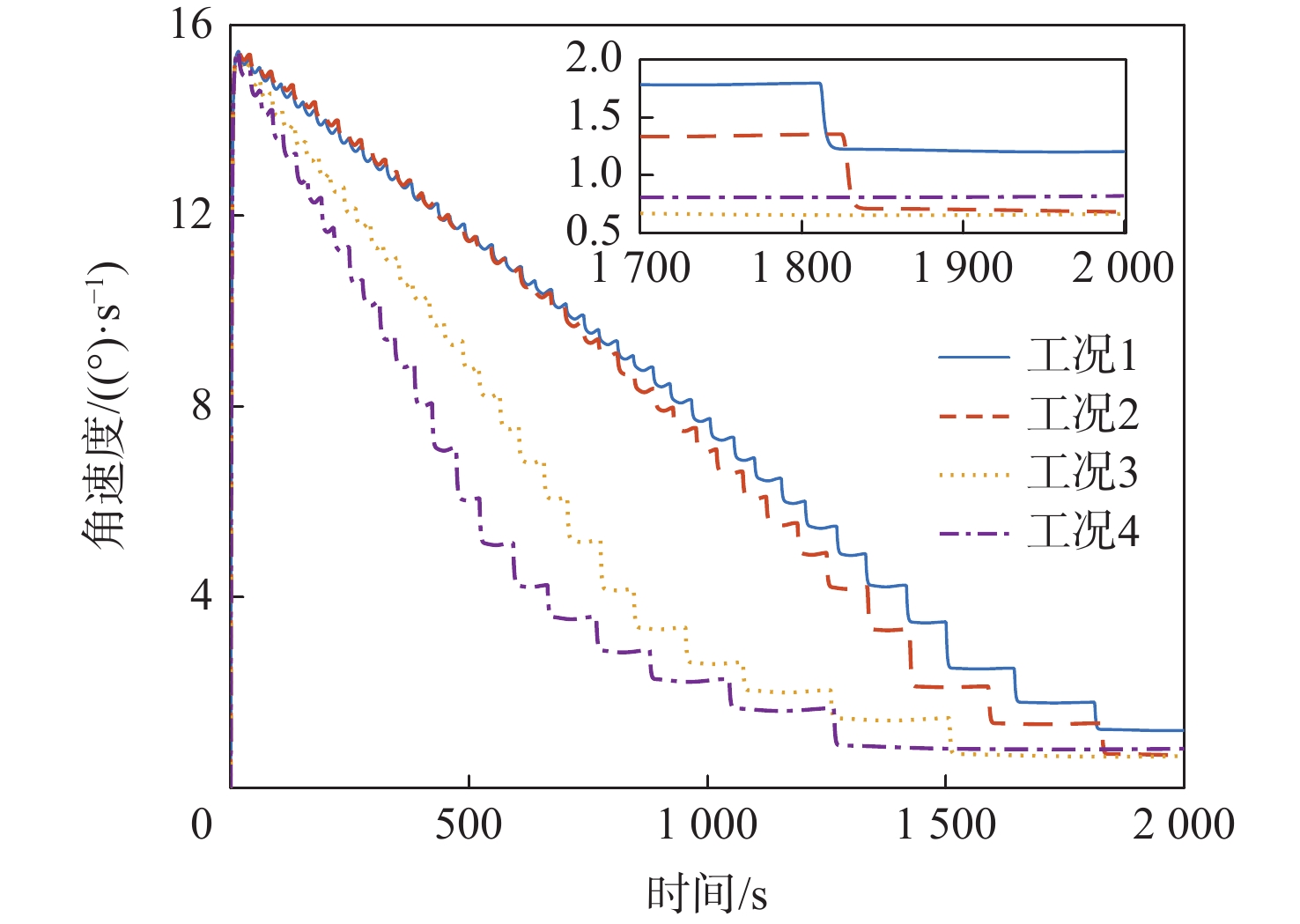
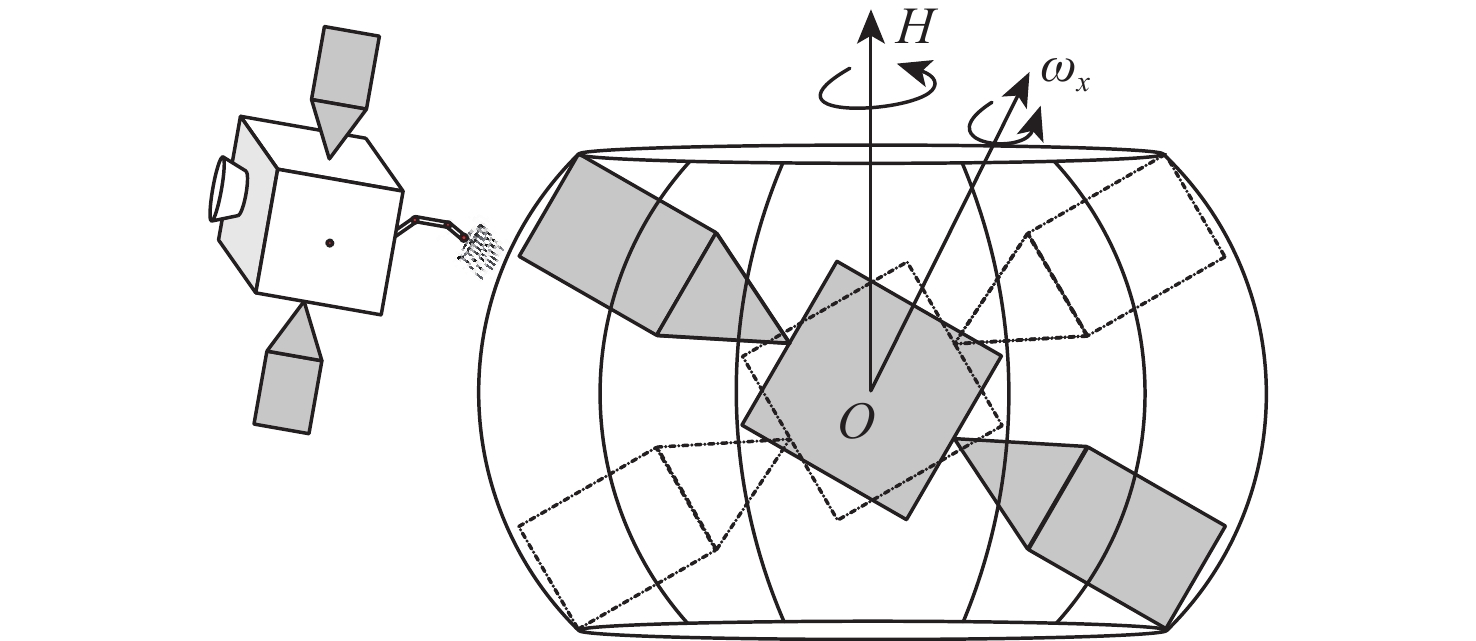
To solve the contact detumbling problem of nutation non-cooperative targets with model uncertainty, a dual-channel adaptive control method based on characteristic model is proposed. The dynamic model of the detumbling system is established considering the geometric relationship during the contact collision and using the linear elastic contact force model. Through the analysis of the characteristics of the target during free motion, a separation detumbling strategy is designed. Furthermore, the characteristic model of the angular velocity is constructed to describe the nutation target detumbling system with the characteristic parameter expressions given. A dual-channel adaptive controller is designed using the characteristic model. The simulation results show that the method effectively overcomes the model uncertainty through online estimation of characteristic parameters, and that the detumbling is fast with small residual angular velocity.

| [1] |
LIOU J C, JOHNSON N L, HILL N M. Controlling the growth of future LEO debris populations with active debris removal[J]. Acta Astronautica, 2010, 66(5-6): 648-653. doi: 10.1016/j.actaastro.2009.08.005
|
| [2] |
路勇, 刘晓光, 周宇, 等. 空间翻滚非合作目标消旋技术发展综述[J]. 航空学报, 2018, 39(1): 021302.
LU Y, LIU X G, ZHOU Y, et al. Review of detumbling technologies for active removal of uncooperative targets[J]. Acta Aeronautica et Astronautica Sinica, 2018, 39(1): 021302(in Chinese).
|
| [3] |
XU W F, YAN L, HU Z H, et al. Area-oriented coordinated trajectory planning of dual-arm space robot for capturing a tumbling target[J]. Chinese Journal of Aeronautics, 2019, 32(9): 2151-2163. doi: 10.1016/j.cja.2019.03.018
|
| [4] |
LIU X F, ZHANG X Y, CAI G P, et al. A collision control strategy for detumbling a non-cooperative spacecraft by a robotic arm[J]. Multibody System Dynamics, 2021, 53(3): 225-255. doi: 10.1007/s11044-021-09793-x
|
| [5] |
ZANG Y, ZHANG Y, ZHANG J R, et al. Multipoint contact dynamics and the detumbling strategy for a fast-tumbling target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(4): 3113-3122. doi: 10.1109/TAES.2019.2960681
|
| [6] |
CHEN G, WANG Y Q, WANG Y F, et al. Detumbling strategy based on friction control of dual-arm space robot for capturing tumbling target[J]. Chinese Journal of Aeronautics, 2020, 33(3): 1093-1106. doi: 10.1016/j.cja.2019.04.019
|
| [7] |
KANG G H, ZHANG Q, WU J Q, et al. PD-impedance combined control strategy for capture operations using a 3-DOF space manipulator with a compliant end-effector[J]. Sensors, 2020, 20(23): 6739. doi: 10.3390/s20236739
|
| [8] |
LI X A, SUN K, LIU H. Design of a novel deployable mechanism for capturing tumbling debris[J]. Transactions of the Canadian Society for Mechanical Engineering, 2019, 43(3): 294-305. doi: 10.1139/tcsme-2018-0146
|
| [9] |
SUN K, WANG Z, ZHANG Y F, et al. Triaxial contact detumbling of large-scale space debris[C]//2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference. Piscataway: IEEE Press, 2018: 1840-1844.
|
| [10] |
吴昊, 孙晟昕, 魏承, 等. 基于机器人柔性毛刷的空间翻滚目标消旋[J]. 航空学报, 2019, 40(5): 422587.
WU H, SUN S X, WEI C, et al. Tumbling target despun based on robotic flexible brush[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(5): 422587(in Chinese).
|
| [11] |
LIU Y Q, YU Z W, LIU X F, et al. Active detumbling technology for high dynamic non-cooperative space targets[J]. Multibody System Dynamics, 2019, 47(1): 21-41. doi: 10.1007/s11044-019-09675-3
|
| [12] |
段文杰, 朱志斌, 徐拴锋. 失效卫星在轨消旋接触控制研究[C]//第36届中国控制会议论文集. 北京: 中国自动化学会, 2017: 240-245.
DUAN W J, ZHU Z B, XU S F. Research on dynamics and control of on-orbit disabled satellites for positive tumbling breaking[C]// Proceedings of the 36th Chinese Control Conference. Beijing: Chinese Association of Automation, 2017: 239-244 (in Chinese).
|
| [13] |
吴昊. 基于柔性减速刷的空间翻滚目标自主消旋研究[D]. 哈尔滨: 哈尔滨工业大学, 2019.
WU H. Research on autonomous despun of rolling target based on flexible brush[D]. Harbin: Harbin Institute of Technology, 2019 (in Chinese).
|
| [14] |
WANG X L, ZHOU Z C, CHEN Y J, et al. Optimal contact control for space debris detumbling and nutation damping[J]. Advances in Space Research, 2020, 66(4): 951-962. doi: 10.1016/j.asr.2020.04.043
|
| [15] |
DUAN W J, ZHANG H B, WANG D Y. Experiment-based contact dynamic modeling for detumbling a disable satellite[C]//4th International Academy of Astronautics Conference on Dynamics and Control of Space Systems. Escondido: Univelt Inc., 2018: 2053-2060.
|
| [16] |
CHENG W H, LI Z, HE Y Z. Modeling and analysis of contact detumbling by using flexible brush[C]//2019 IEEE International Conference on Unmanned Systems. Piscataway: IEEE Press, 2020: 95-102.
|
| [17] |
孙晟昕, 吴昊, 魏承, 等. 基于柔性毛刷的自旋卫星的消旋动力学分析[J]. 中国科学:物理学 力学 天文学, 2019, 49(2): 139-146.
SUN S X, WU H, WEI C, et al. Dynamic analysis of rotating satellite de-spun using flexible brush[J]. Scientia Sinica (Physica, Mechanica & Astronomica), 2019, 49(2): 139-146(in Chinese).
|
| [18] |
段文杰, 张海博, 徐拴锋. 一种基于力矩分析的失效卫星接触消旋方法[C]//第三十九届中国控制会议论文集. 北京: 中国自动化学会, 2020: 834-839.
DUAN W J, ZHANG H B, XU S F. A contact detubling method for disabled satellites hased on torque jnalyzing[C]//Proceedings of the 39th Chinese Control Conference. Beijing: Chinese Association of Automation, 2020: 834-839(in Chinese).
|
| [19] |
吴宏鑫, 胡军. 特征建模理论、方法和应用[M]. 北京: 国防工业出版社, 2019: 7-8.
WU H X, HU J. Theory, methods and applications of characteristic modeling[M]. Beijing: National Defense Industry Press, 2019: 7-8 (in Chinese).
|
| [20] |
常亚菲. 一类不确定非线性系统基于特征模型的复合自适应控制[J]. 控制理论与应用, 2019, 36(7): 1137-1146. doi: 10.7641/CTA.2018.80134
CHANG Y F. Characteristic model-based composite adaptive control for a class of uncertain nonlinear systems[J]. Control Theory & Applications, 2019, 36(7): 1137-1146(in Chinese). doi: 10.7641/CTA.2018.80134
|
| [21] |
常亚菲, 姜甜甜. 高超声速再入飞行器的特征建模及自适应递推滑模控制[J]. 宇航学报, 2018, 39(8): 889-899. doi: 10.3873/j.issn.1000-1328.2018.08.008
CHANG Y F, JIANG T T. Characteristic modeling and adaptive recursive sliding mode control for hypersonic reentry vehicle[J]. Journal of Astronautics, 2018, 39(8): 889-899(in Chinese). doi: 10.3873/j.issn.1000-1328.2018.08.008
|
| [22] |
李毛毛, 胡军. 火星进入段自适应预测校正制导方法[J]. 宇航学报, 2017, 38(5): 506-515. doi: 10.3873/j.issn.1000-1328.2017.05.009
LI M M, HU J. An adaptive predictor-corrector method of Mars entry phase[J]. Journal of Astronautics, 2017, 38(5): 506-515(in Chinese). doi: 10.3873/j.issn.1000-1328.2017.05.009
|
| [23] |
张斌, 周敬. 基于特征模型的Halo轨道维持控制[J]. 航空学报, 2019, 40(11): 323206.
ZHANG B, ZHOU J. Characteristic model-based station-keeping control for Halo orbit[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40(11): 323206(in Chinese).
|
| [24] |
王璟贤, 师鹏, 陈致钧, 等. 非合作目标安全走廊设计及飞越逼近轨迹优化[J]. 北京航空航天大学学报, 2021, 47(9): 1832-1840. doi: 10.13700/j.bh.1001-5965.2020.0301
WANG J X, SHI P, CHEN Z J, et al. Design of non-cooperative target’s safe corridor and optimization of fly-by approach trajectory[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1832-1840(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0301
|
| [25] |
刘暾, 赵钧. 空间飞行器动力学[M]. 哈尔滨: 哈尔滨工业大学出版社, 2003: 185-186.
LIU T, ZHAO J. Spacecraft dynamics[M]. Harbin: Harbin Institute of Technology Press, 2003: 185-186 (in Chinese).
|
| [26] |
章仁为. 卫星轨道姿态动力学与控制[M]. 北京: 北京航空航天大学出版社, 1998: 155-160.
ZHANG R W. Satellite orbit attitude dynamics and control[M]. Beijing: Beijing University of Aeronautics & Astronautics Press, 1998: 155-160 (in Chinese).
|
| [27] |
李超, 何英姿, 胡勇. 基于特征模型的失效航天器消旋控制[J]. 航空学报, 2021, 42(11): 525472. doi: 10.7527/S1000-6893.2021.25472
LI C, HE Y Z, HU Y. Characteristic model-based detumbling control for failure spacecraft[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(11): 525472(in Chinese). doi: 10.7527/S1000-6893.2021.25472
|
Figures(13) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: