| Citation: | LING H,DU Q J,PANG H,et al. Instantaneous torque control of SRM based on improved terminal SMC and SMO[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3145-3155 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0021

|
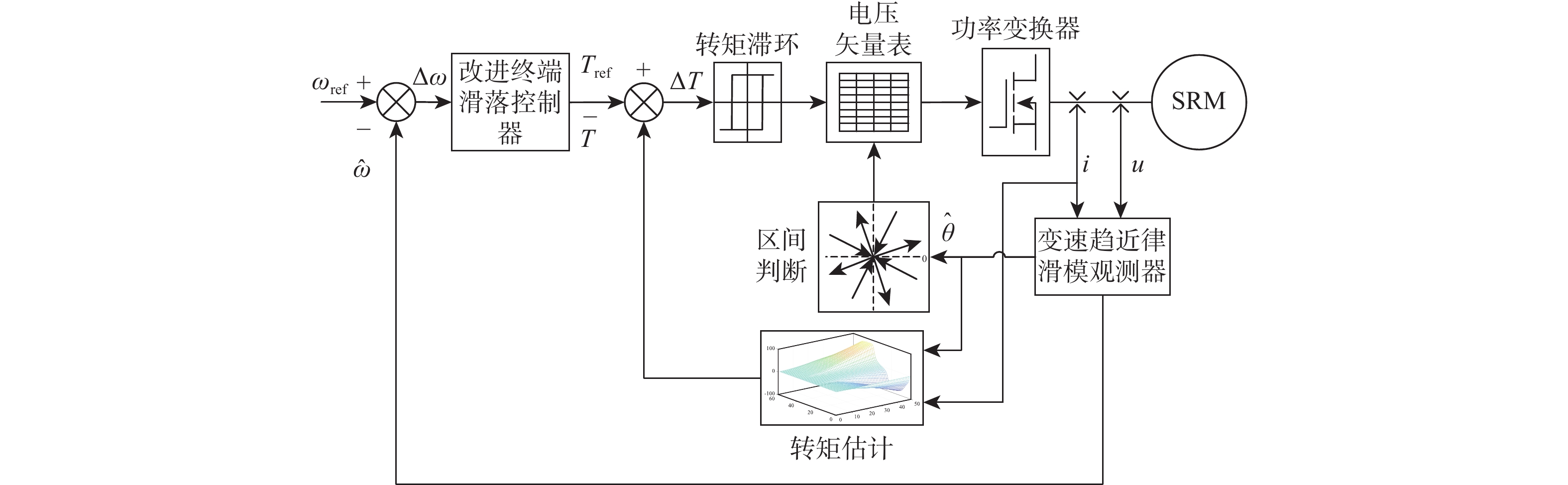
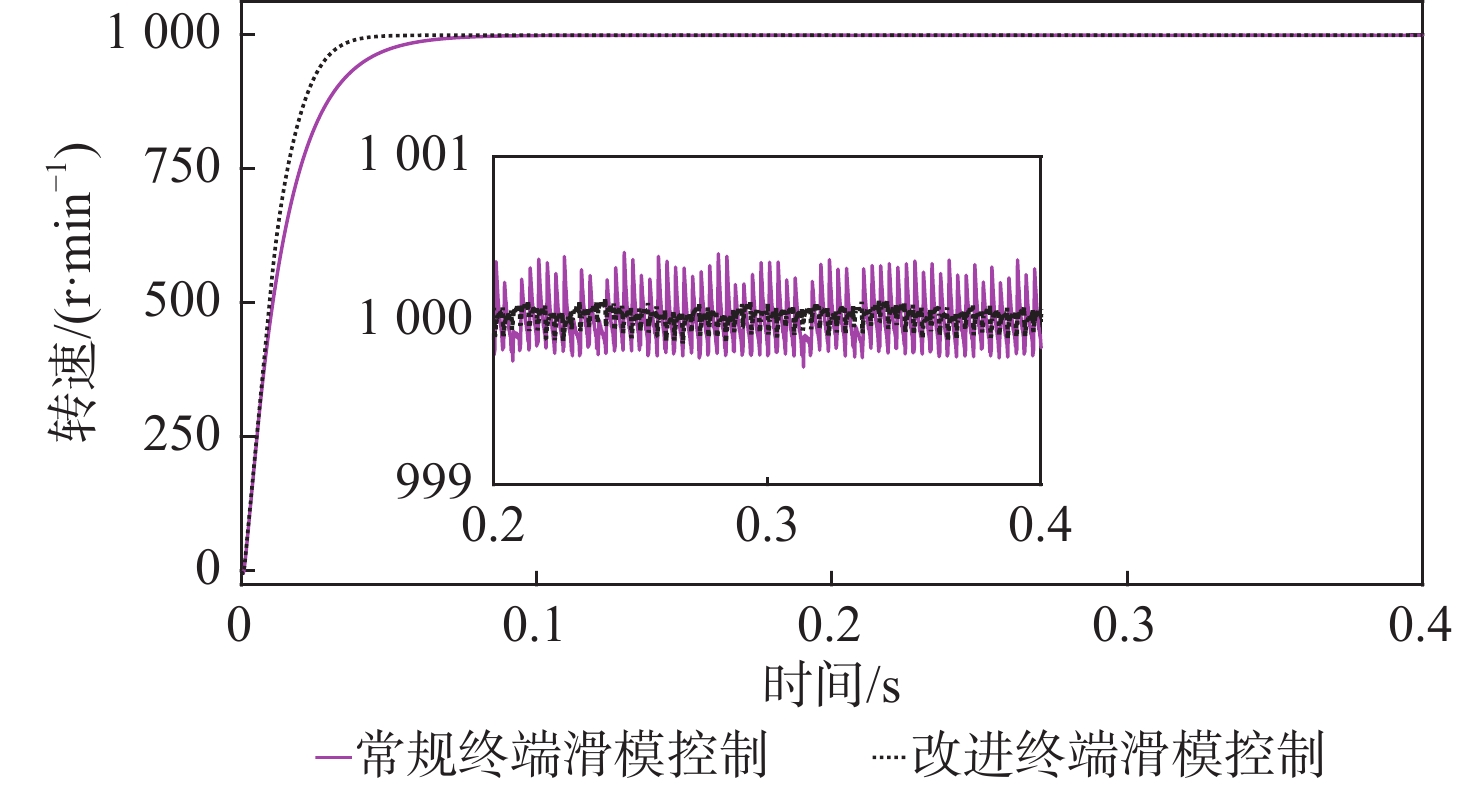
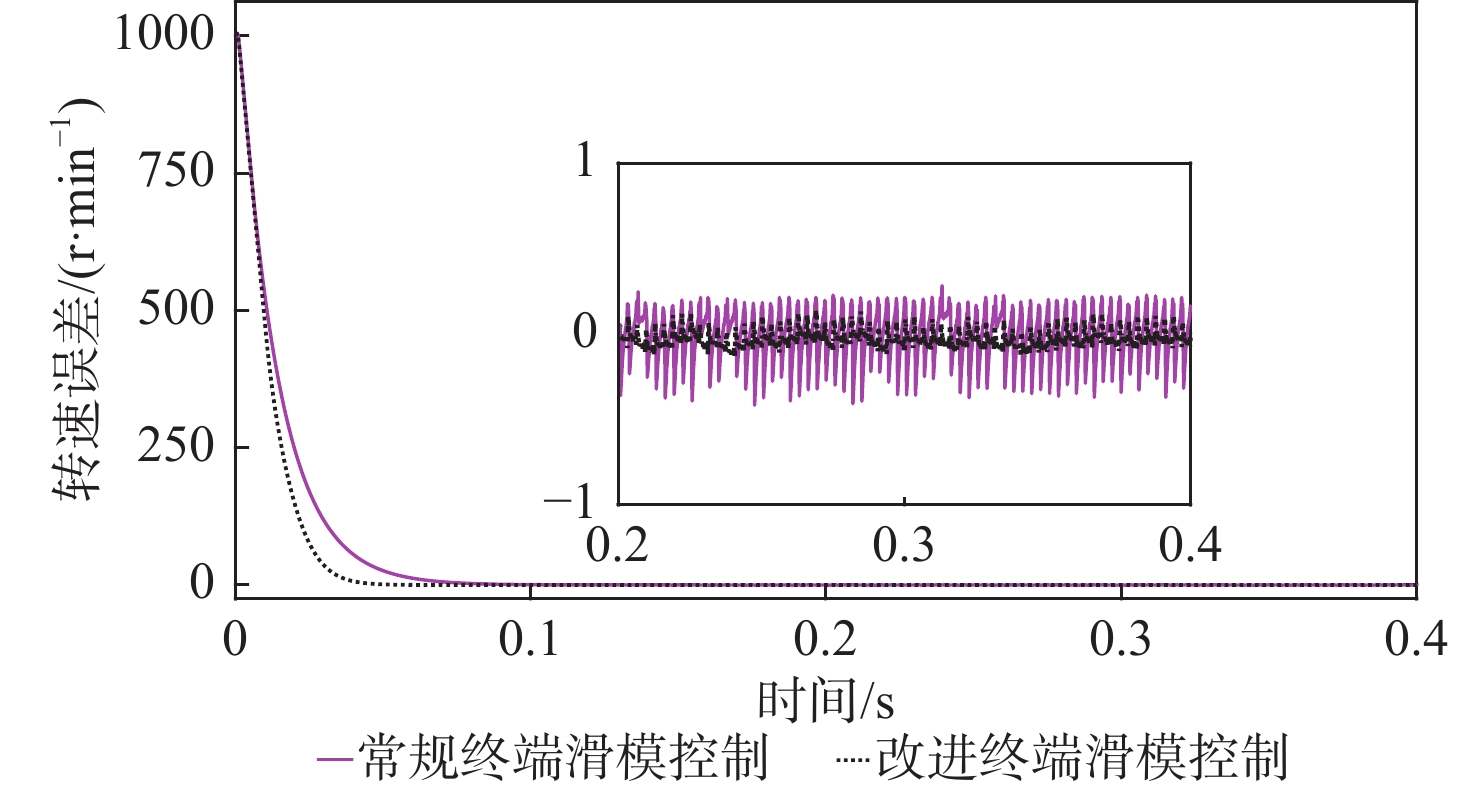
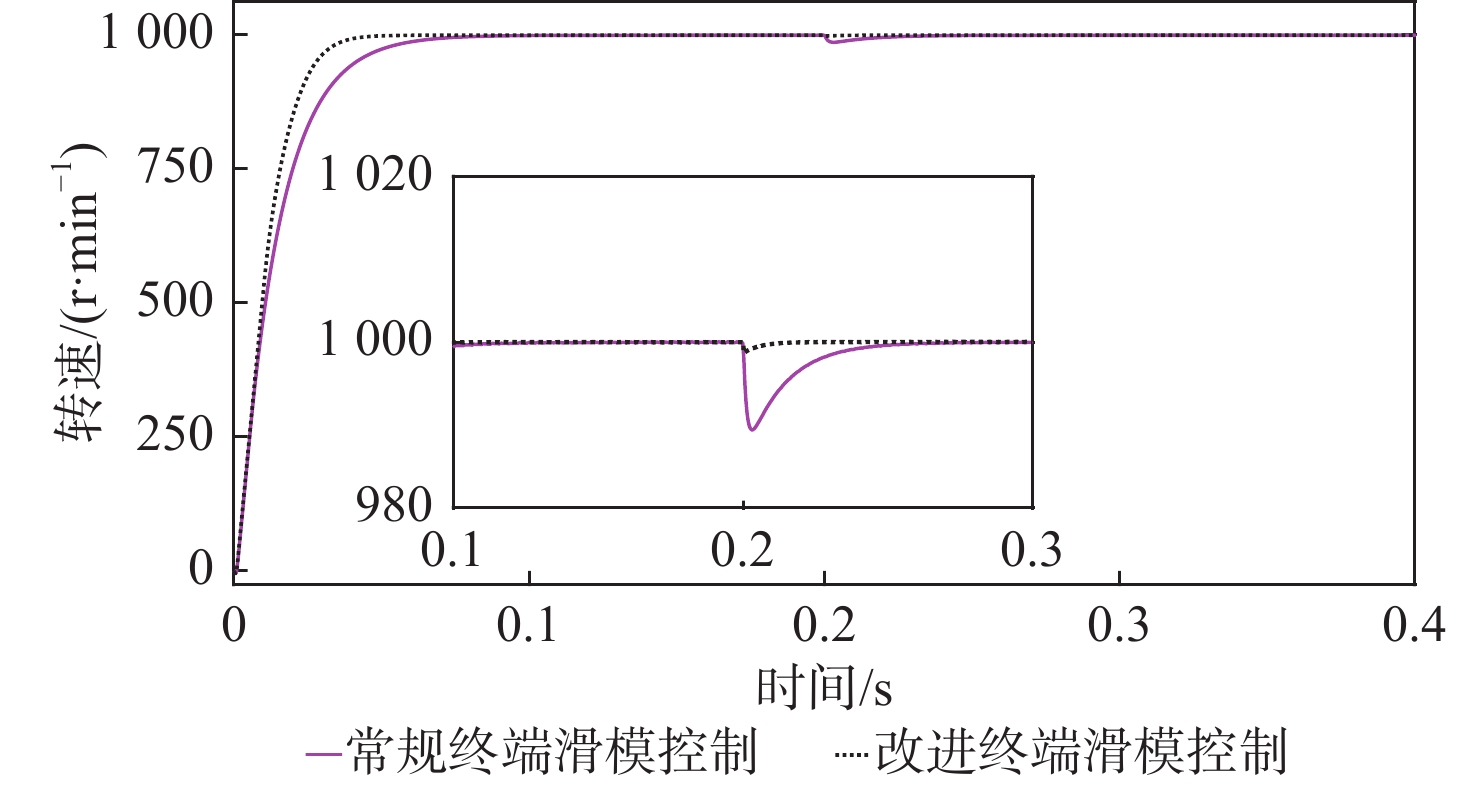
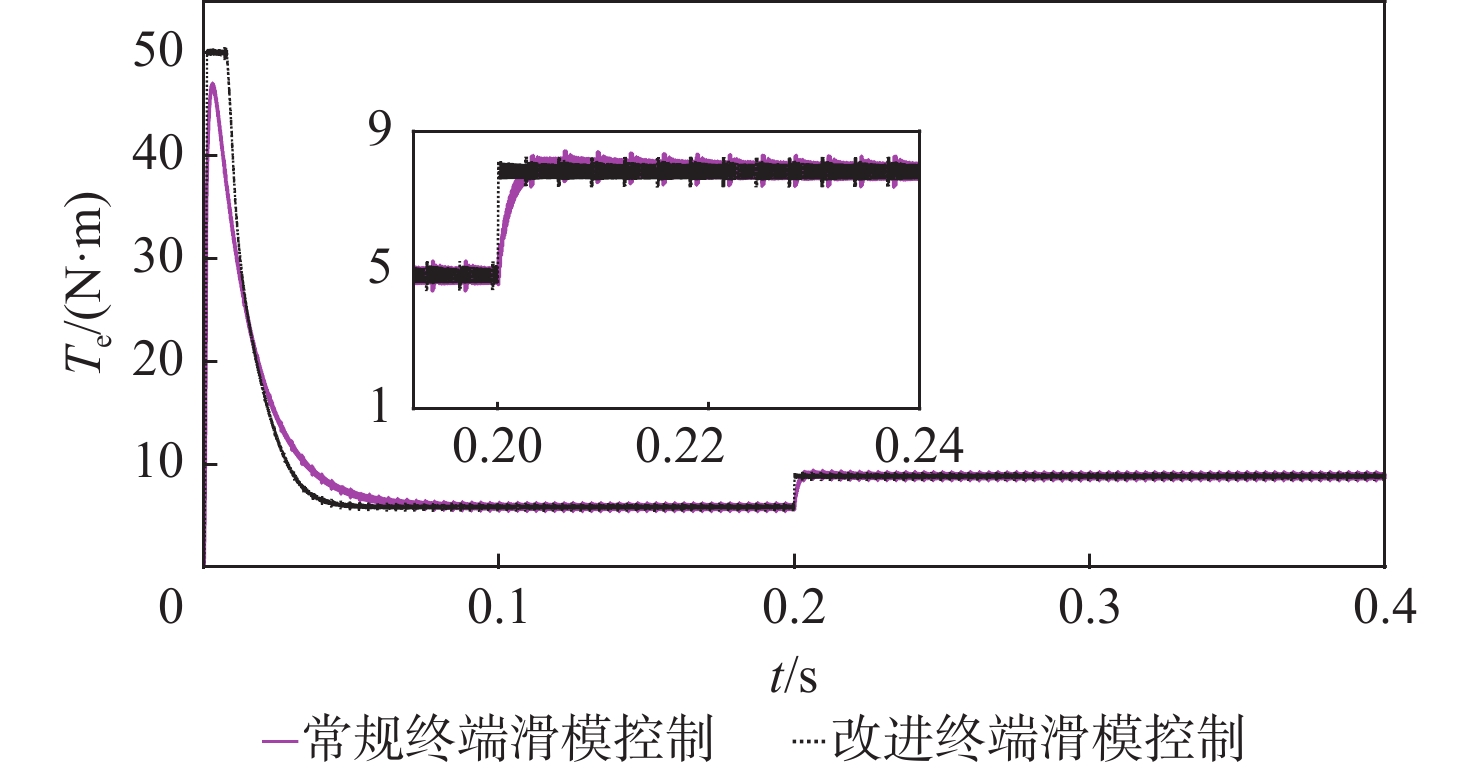
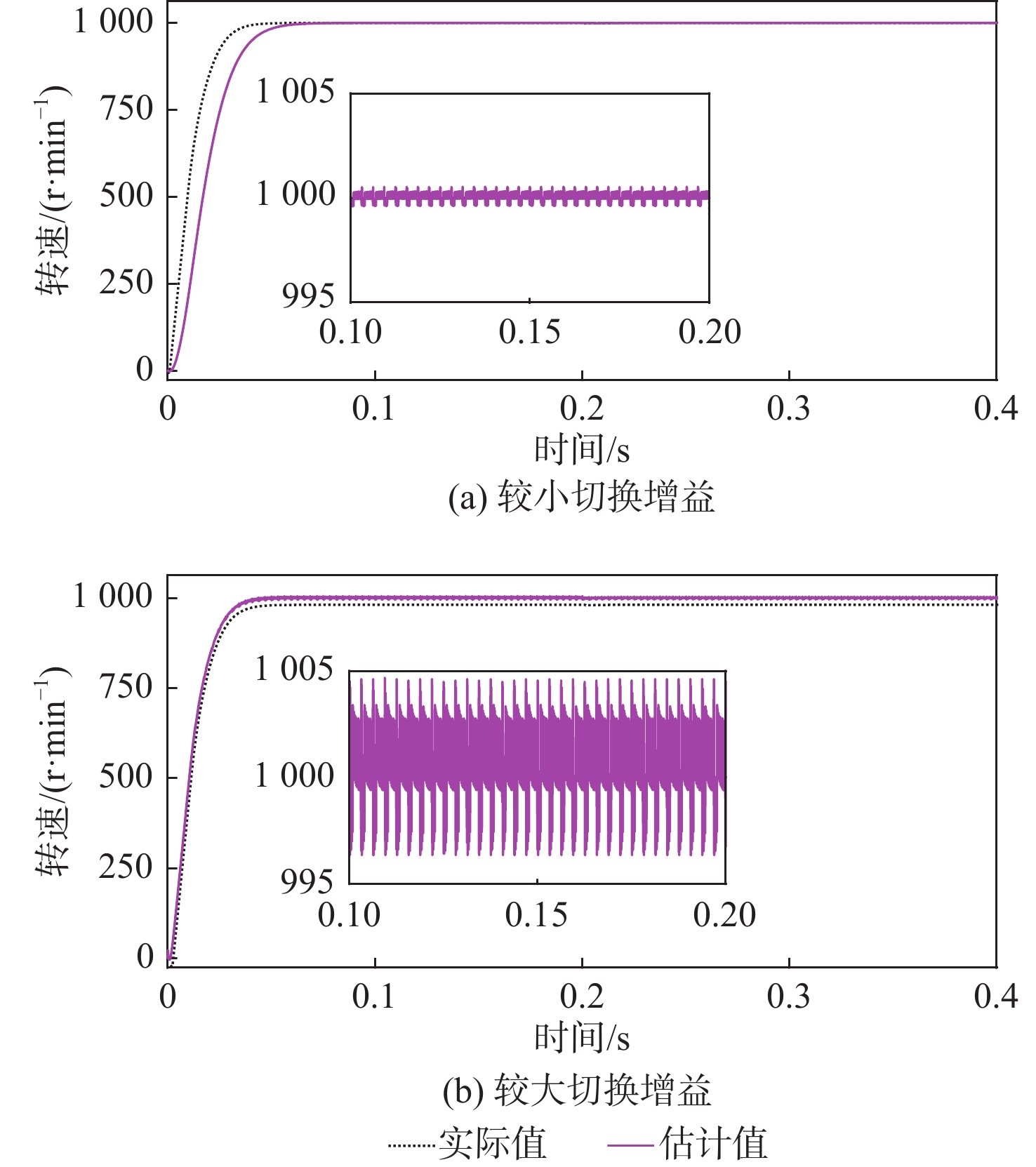
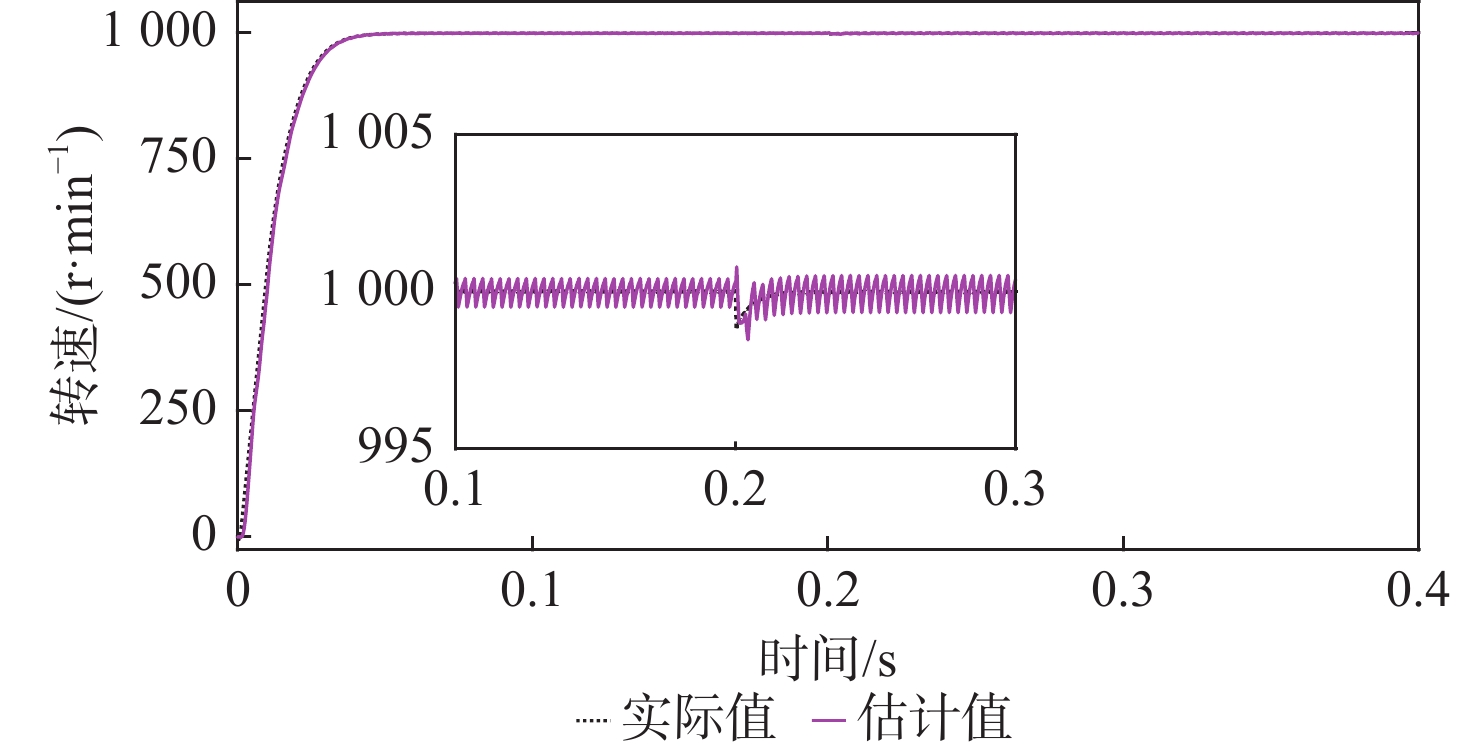
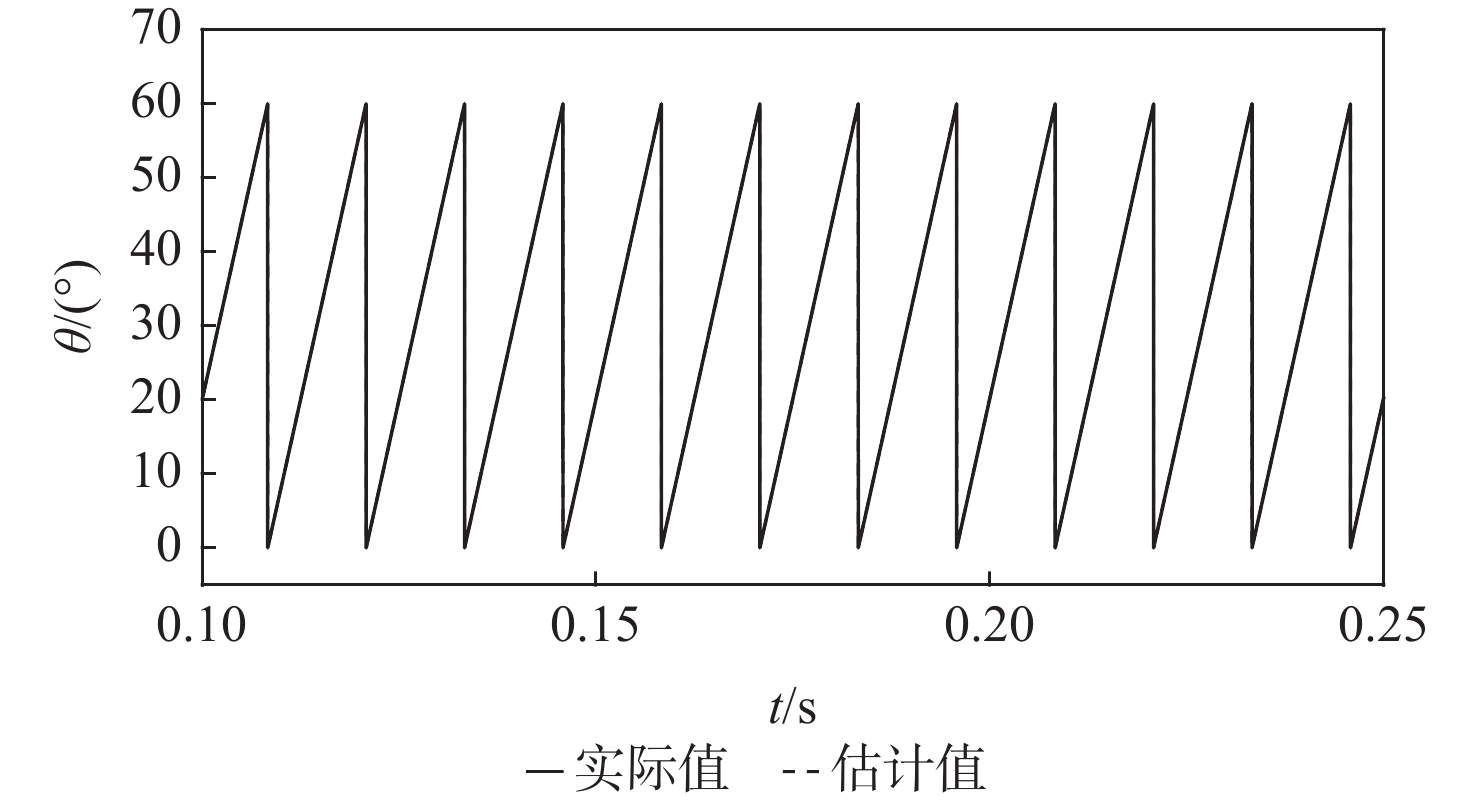
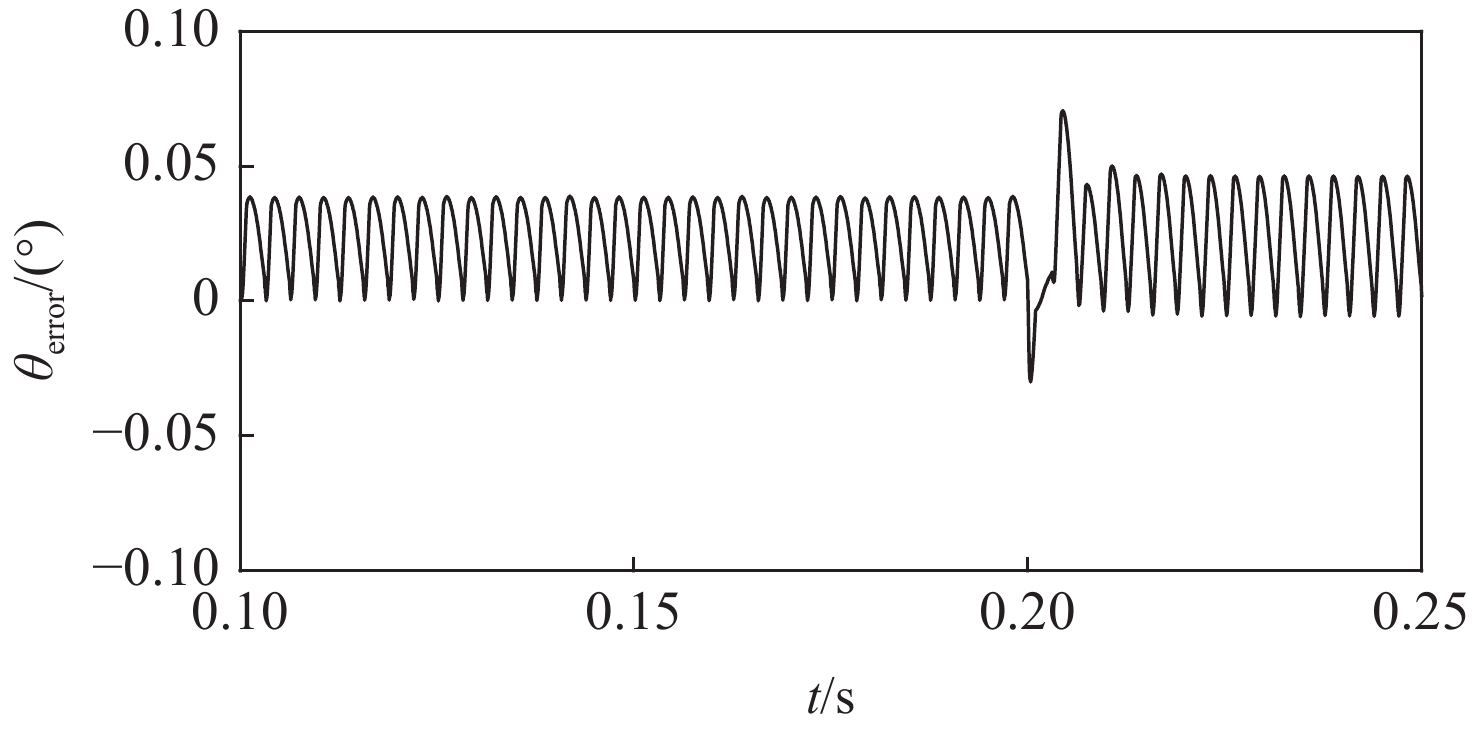
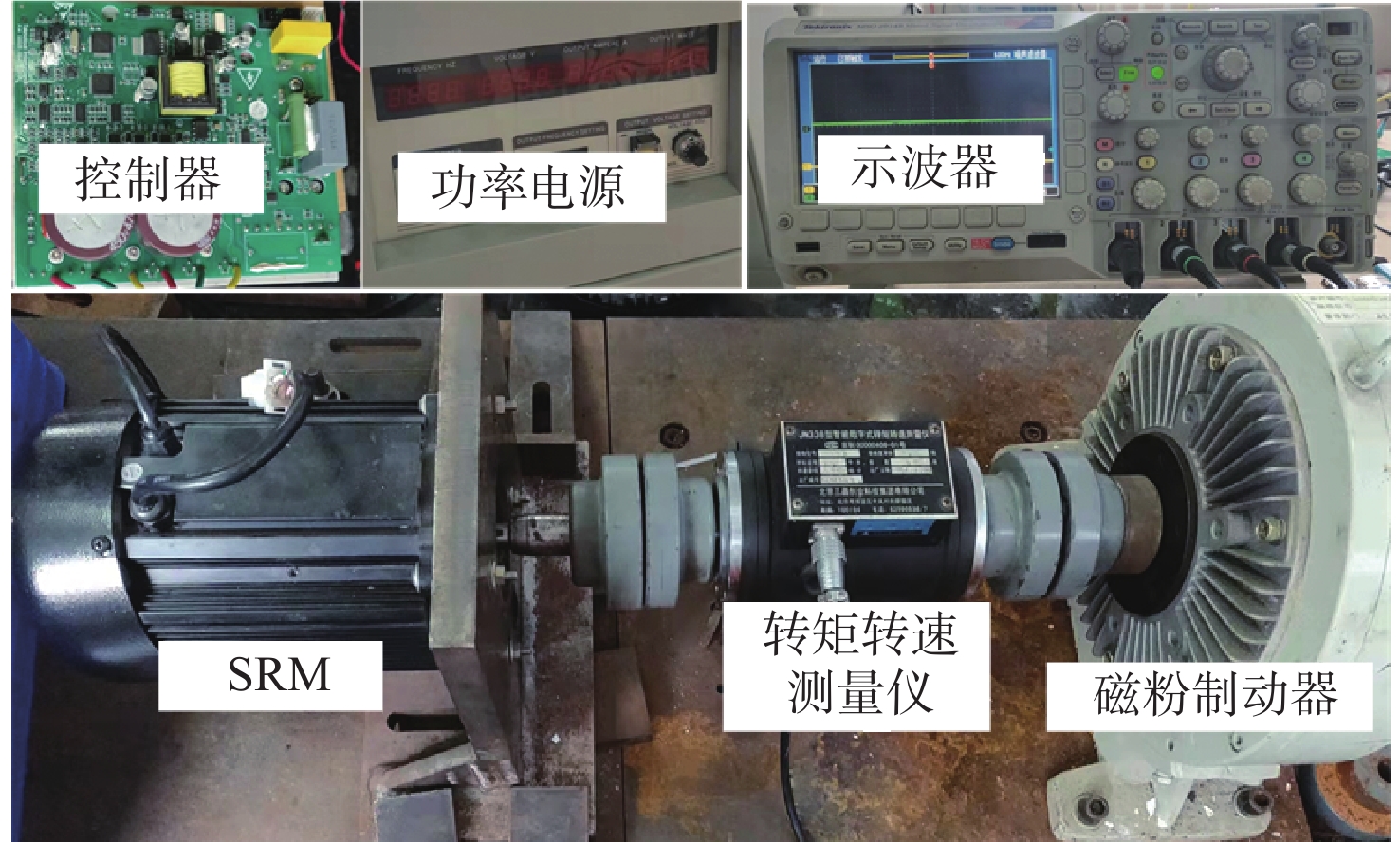
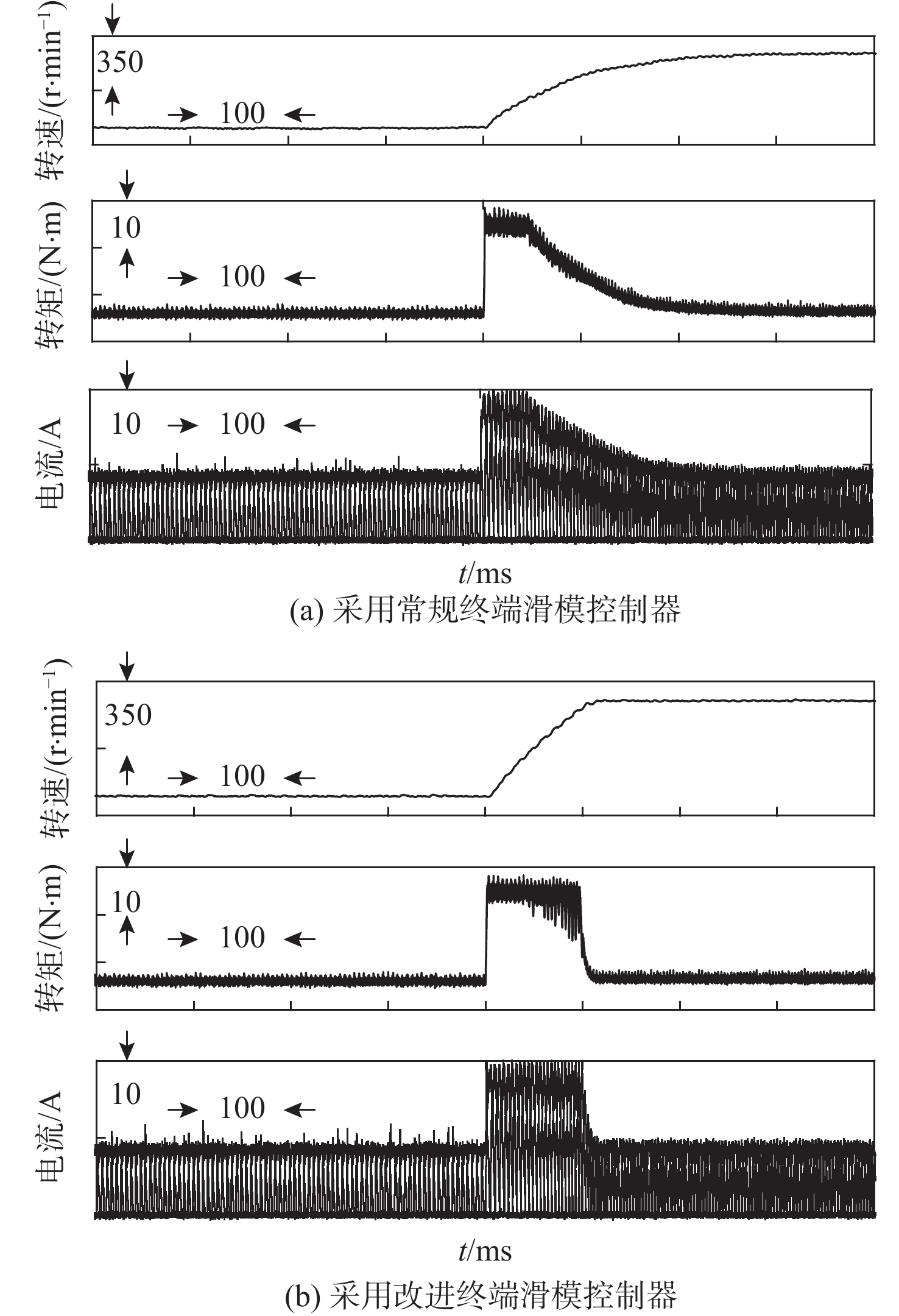
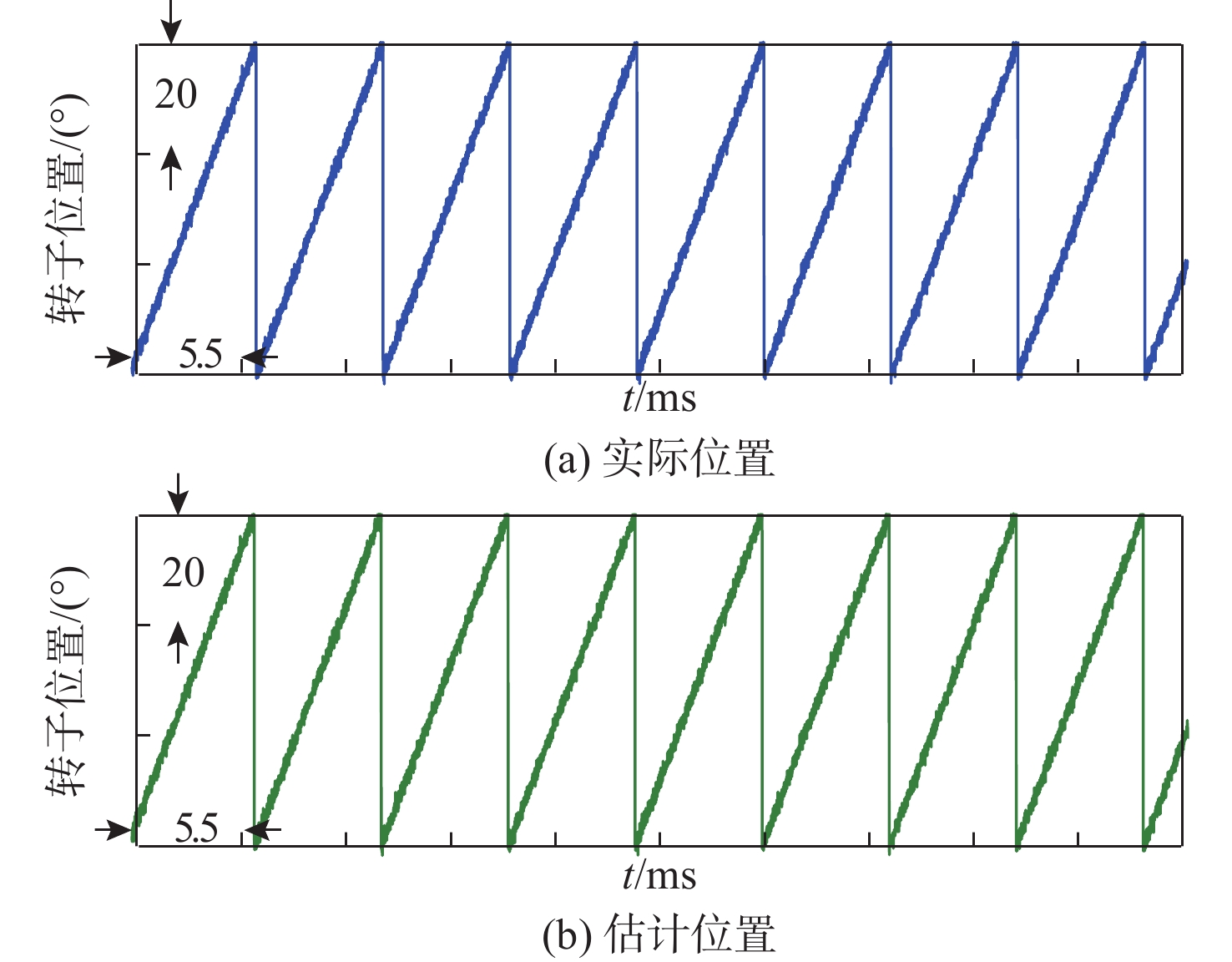
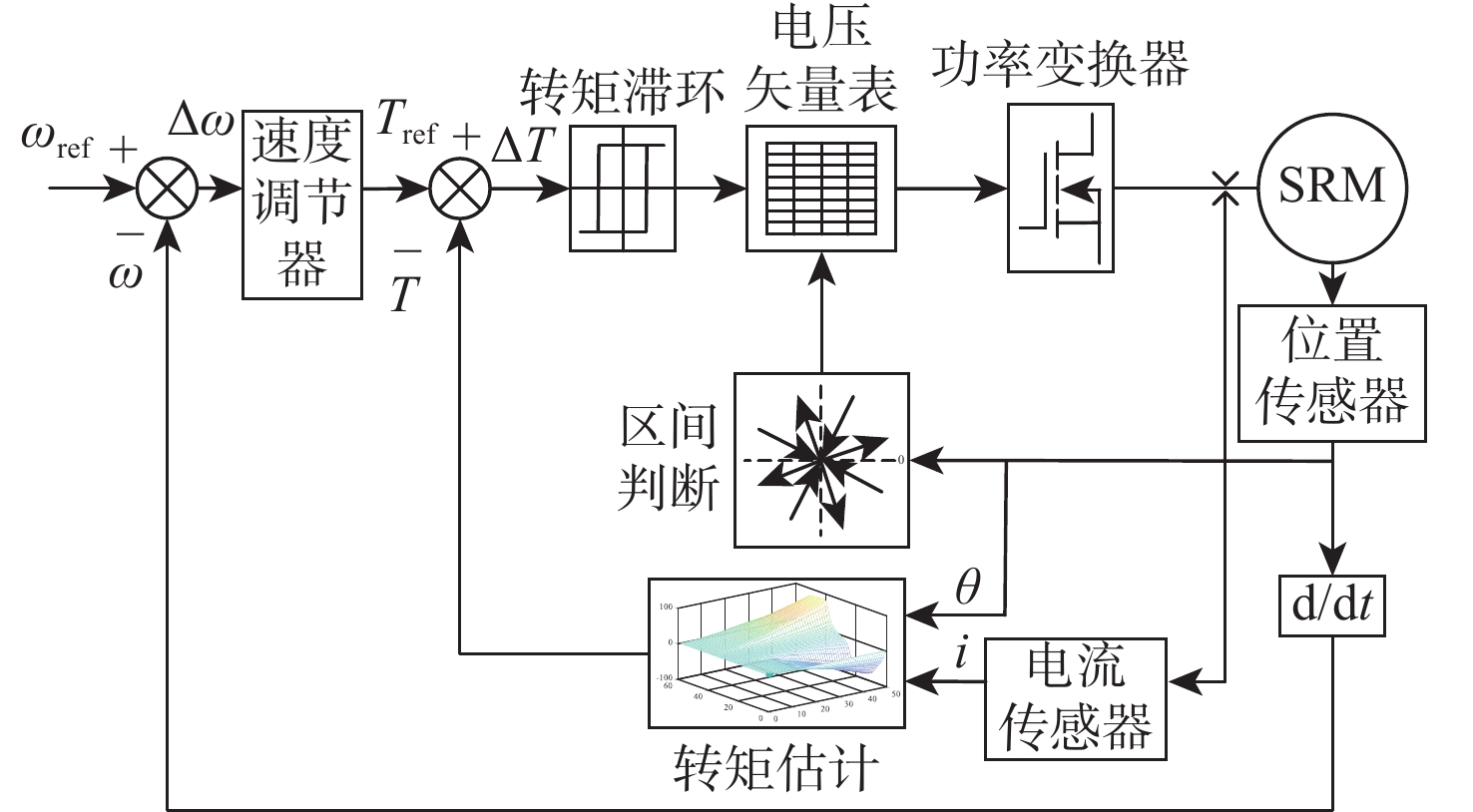
An instantaneous torque control method for switched reluctance motors (SRM) based on improved terminal sliding mode controller (SMC) and sliding mode observer (SMO) with variable speed reaching law was proposed to address the issues of slow response speed of conventional terminal sliding mode control system of SRM and system chattering of traditional sliding mode observer.Firstly, an improved nonsingular fast terminal sliding mode surface with fast convergence of motor speed error and a variable speed power reaching law with adaptive adjustment of reaching law speed were designed. The continuous nonsingular control law was obtained by using the equivalent control method. The stability and finite-time convergence of the system were proved by the Lyapunov function. Secondly, a sliding mode observer with variable speed reaching law was designed to realize sensorless control of SRM. In order to solve the chattering and convergence speed issues brought on by the fixed switching gain of the conventional sliding mode observer, the hyperbolic tangent function was employed as the switching function and the fast power reaching law was introduced as the reaching law of speed observation.The stability of the observer was proved by the Lyapunov function. Finally, the simulation and experiment verified the effectiveness of the proposed method. The results show that compared with the conventional terminal sliding mode control, the improved terminal sliding mode control system can realize the tracking of the desired speed in 0.07 s, the adjustment time is reduced by 0.04 s, and the speed fluctuation is reduced by 0.5 r/min when the system is stable, which has better response speed and stability. When the load suddenly increases, the system speed can be adjusted to a given value within 0.02 s, and the recovery time is reduced by 0.05 s, which has a better adjustment ability. The sliding mode observer with variable speed reaching law can realize the convergence of speed estimation error within 0.01 s, and the error fluctuation is maintained within 2 r/min, which can realize the accurate estimation of motor speed and rotor position.

| [1] |
王宏华. 开关磁阻电动机调速控制技术[M]. 2版. 北京: 机械工业出版社, 2014: 7-8, 31-33.
WANG H H. Speed control technology of switched reluctance motor[M]. 2nd ed. Beijing: China Machine Press, 2014: 7-8, 31-33(in Chinese).
|
| [2] |
朱叶盛, 章国宝, 黄永明. 基于PWM的开关磁阻电机直接瞬时转矩控制[J]. 电工技术学报, 2017, 32(7): 31-39.
ZHU Y S, ZHANG G B, HUANG Y M. PWM-based direct instantaneous torque control of switched reluctance machine[J]. Transactions of China Electrotechnical Society, 2017, 32(7): 31-39(in Chinese).
|
| [3] |
夏长亮, 修杰. 基于RBF神经网络非线性预测模型的开关磁阻电机自适应PID控制[J]. 中国电机工程学报, 2007, 27(3): 57-62. doi: 10.3321/j.issn:0258-8013.2007.03.011
XIA C L, XIU J. RBF ANN nonlinear prediction model based adaptive PID control of switched reluctance motor[J]. Proceedings of the CSEE, 2007, 27(3): 57-62(in Chinese). doi: 10.3321/j.issn:0258-8013.2007.03.011
|
| [4] |
匡斯建, 张小平, 刘苹, 等. 基于相电感非饱和区定位的开关磁阻电机无位置传感器控制方法[J]. 电工技术学报, 2020, 35(20): 4296-4305.
KUANG S J, ZHANG X P, LIU P, et al. Sensorless control method for switched reluctance motors based on locations of phase inductance characteristic points[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4296-4305(in Chinese).
|
| [5] |
昝小舒, 陈昊. 基于自抗扰控制的开关磁阻电机转速闭环性能[J]. 电工技术学报, 2012, 27(7): 17-25.
ZAN X S, CHEN H. Rotating speed closed loop study of switched reluctance motor based on auto disturbance rejection control[J]. Transactions of China Electrotechnical Society, 2012, 27(7): 17-25(in Chinese).
|
| [6] |
SHI T N, XIA C L, WANG M C, et al. Single neural PID control for sensorless switched reluctance motor based on RBF neural network[C]//Proceedings of the 6th World Congress on Intelligent Control and Automation. Piscataway: IEEE Press, 2006: 8069-8073.
|
| [7] |
刘勇智, 鄯成龙, 林博闻, 等. 基于自适应二阶终端滑模的SRM直接转矩控制[J]. 北京航空航天大学学报, 2018, 44(10): 2043-2051.
LIU Y Z, SHAN C L, LIN B W, et al. Direct torque control of switched reluctance motor based on adaptive second-order terminal sliding mode[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(10): 2043-2051(in Chinese).
|
| [8] |
LIN C. Nonsingular terminal sliding mode control of robot manipulators using fuzzy wavelet networks[J]. IEEE Transactions on Fuzzy Systems, 2006, 14(6): 849-859. doi: 10.1109/TFUZZ.2006.879982
|
| [9] |
YANG L, YANG J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems[J]. International Journal of Robust and Nonlinear Control, 2011, 21(16): 1865-1879. doi: 10.1002/rnc.1666
|
| [10] |
XU S S, CHEN C, WU Z. Study of nonsingular fast terminal sliding-mode fault-tolerant control[J]. IEEE Transactions on Industrial Electronics, 2015, 62(6): 3906-3913.
|
| [11] |
LIAN S K, MENG W, LIN Z M, et al. Adaptive attitude control of a quadrotor using fast nonsingular terminal sliding mode[J]. IEEE Transactions on Industrial Electronics, 2022, 69(2): 1597-1607. doi: 10.1109/TIE.2021.3057015
|
| [12] |
QIAO L, ZHANG W D. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 2019, 44(2): 363-385. doi: 10.1109/JOE.2018.2809018
|
| [13] |
刘金琨. 滑模变结构控制MATALB仿真[M]. 4版. 北京: 清华大学出版社, 2019: 38-39.
LIU J K. Sliding mode control and MATALB simulation[M]. 4th ed. Beijing: Tsinghua University Press, 2019: 38-39(in Chinese).
|
| [14] |
高洁, 王华宇, 徐萌. 开关磁阻电机的分数阶终端滑模控制[J]. 电机与控制学报, 2022, 26(2): 142-150.
GAO J, WANG H Y, XU M. Improved terminal sliding mode control strategy of switched reluctance motor based on fractional calculus[J]. Electric Machines and Control, 2022, 26(2): 142-150(in Chinese).
|
| [15] |
李慧洁, 蔡远利. 基于双幂次趋近律的滑模控制方法[J]. 控制与决策, 2016, 31(3): 498-502.
LI H J, CAI Y L. Sliding mode control with double power reaching law[J]. Control and Decision, 2016, 31(3): 498-502(in Chinese).
|
| [16] |
YU S H, YU X H, SHIRINZADEH B, et al. Continuous finite-time control for robotic manipulators with terminal sliding mode[J]. Automatica, 2005, 41(11): 1957-1964. doi: 10.1016/j.automatica.2005.07.001
|
| [17] |
李逃昌. 基于新型趋近律的非线性积分滑模控制方法[J]. 控制工程, 2019, 26(11): 2031-2035.
LI T C. Nonlinear integral sliding mode control method based on new reaching law[J]. Control Engineering of China, 2019, 26(11): 2031-2035(in Chinese).
|
| [18] |
冒建亮, 李奇, 朱海荣. 多源扰动下光电跟踪系统连续非奇异终端滑模控制[J]. 控制理论与应用, 2017, 34(4): 413-423.
MAO J L, LI Q, ZHU H R. Continuous nonsingular terminal sliding mode control of optical-electronic tracking system subject to multiple disturbances[J]. Control Theory & Applications, 2017, 34(4): 413-423(in Chinese).
|
| [19] |
周永勤, 王旭东, 张玉光, 等. 开关磁阻电机模糊滑模观测器间接位置检测[J]. 电机与控制学报, 2013, 17(6): 57-63. doi: 10.3969/j.issn.1007-449X.2013.06.009
ZHOU Y Q, WANG X D, ZHANG Y G, et al. Sensorless detection technique on fuzzy sliding mode observer for SRM[J]. Electric Machines and Control, 2013, 17(6): 57-63(in Chinese). doi: 10.3969/j.issn.1007-449X.2013.06.009
|
| [20] |
吕德刚, 李子豪. 表贴式永磁同步电机改进滑模观测器控制[J]. 电机与控制学报, 2021, 25(10): 58-66.
LÜ D G, LI Z H. Improved sliding mode observer control of surface mounted permanent magnet synchronous motor[J]. Electric Machines and Control, 2021, 25(10): 58-66(in Chinese).
|
| [21] |
CHEOK A D, FUKUDA Y. A new torque and flux control method for switched reluctance motor drives[J]. IEEE Transactions on Power Electronics, 2002, 17(4): 543-557. doi: 10.1109/TPEL.2002.800968
|
| [22] |
李鹏, 马建军, 郑志强. 采用幂次趋近律的滑模控制稳态误差界[J]. 控制理论与应用, 2011, 28(5): 619-624.
LI P, MA J J, ZHENG Z Q. Sliding mode control approach based on nonlinear integrator[J]. Control Theory & Applications, 2011, 28(5): 619-624(in Chinese).
|
| [23] |
冒建亮, 李奇, 朱海荣. 一种连续非奇异快速终端滑模控制方法[J]. 控制与决策, 2016, 31(10): 1873-1878.
MAO J L, LI Q, ZHU H R. A continuous nonsingular fast terminal sliding mode control method[J]. Control and Decision, 2016, 31(10): 1873-1878(in Chinese).
|
Figures(18) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: