| Citation: | CHEN T T,WANG F Y,XIA C Y,et al. Tracking control of multi-agent systems based on persistent-hold mechanism[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3321-3327 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0065

|
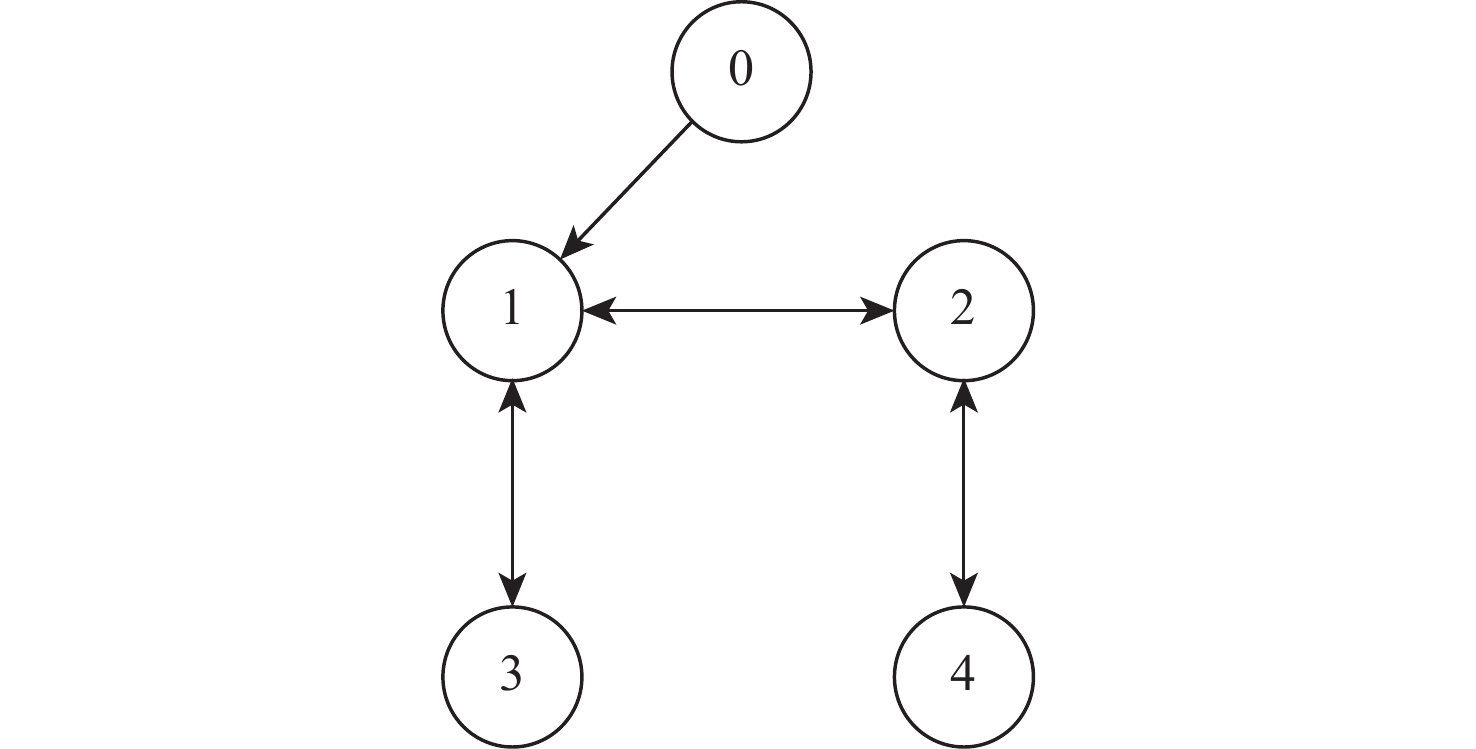
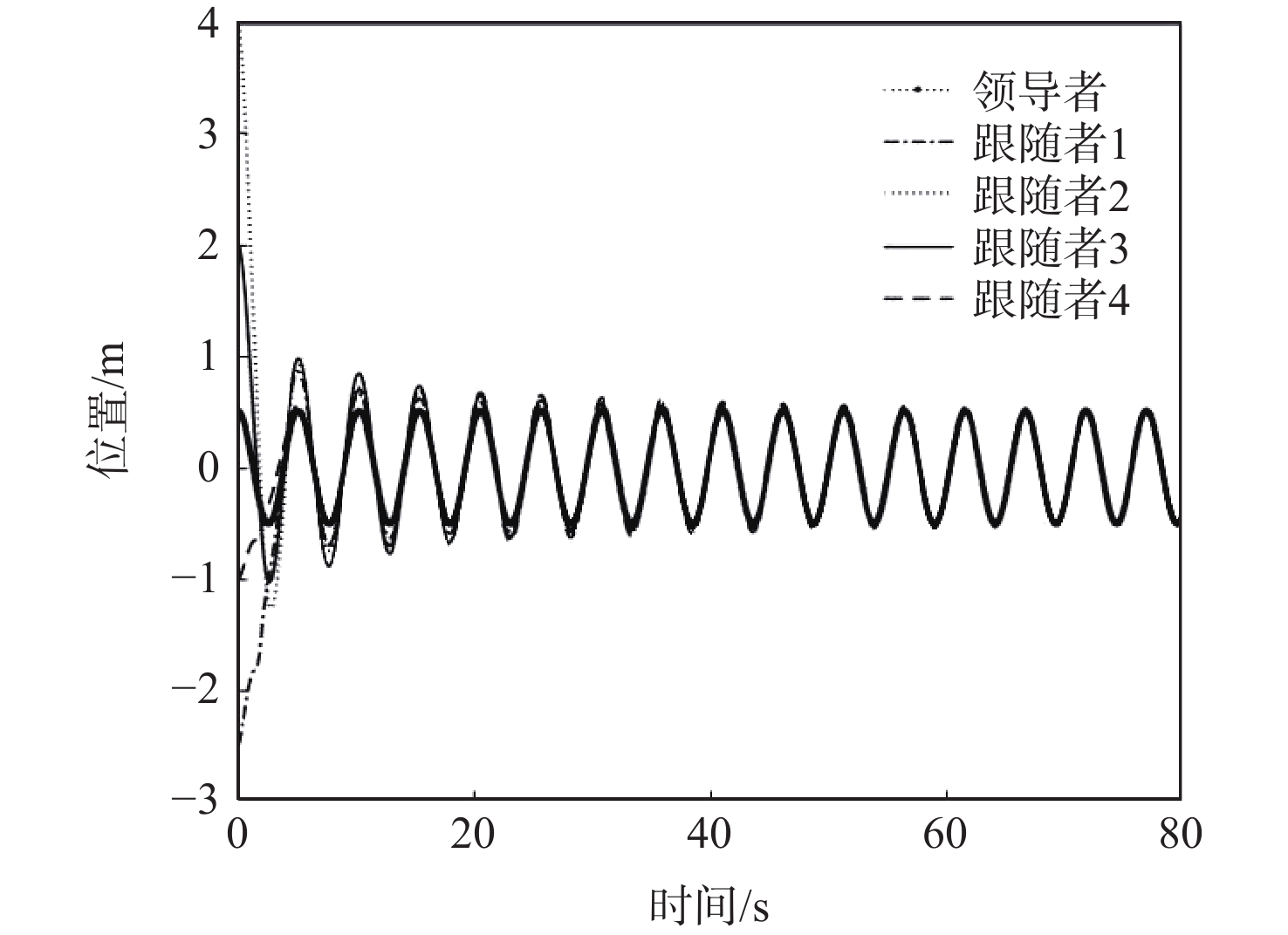
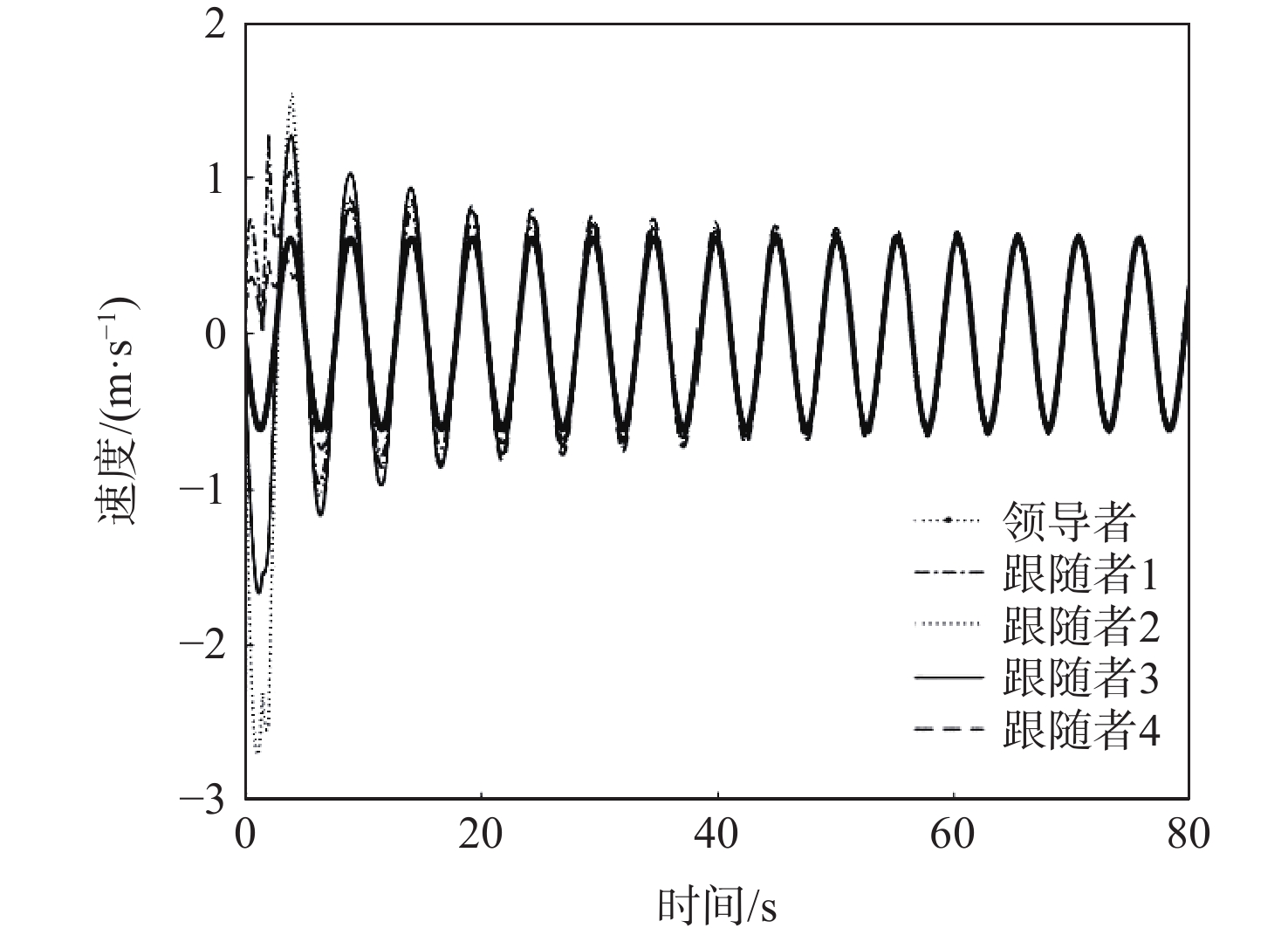
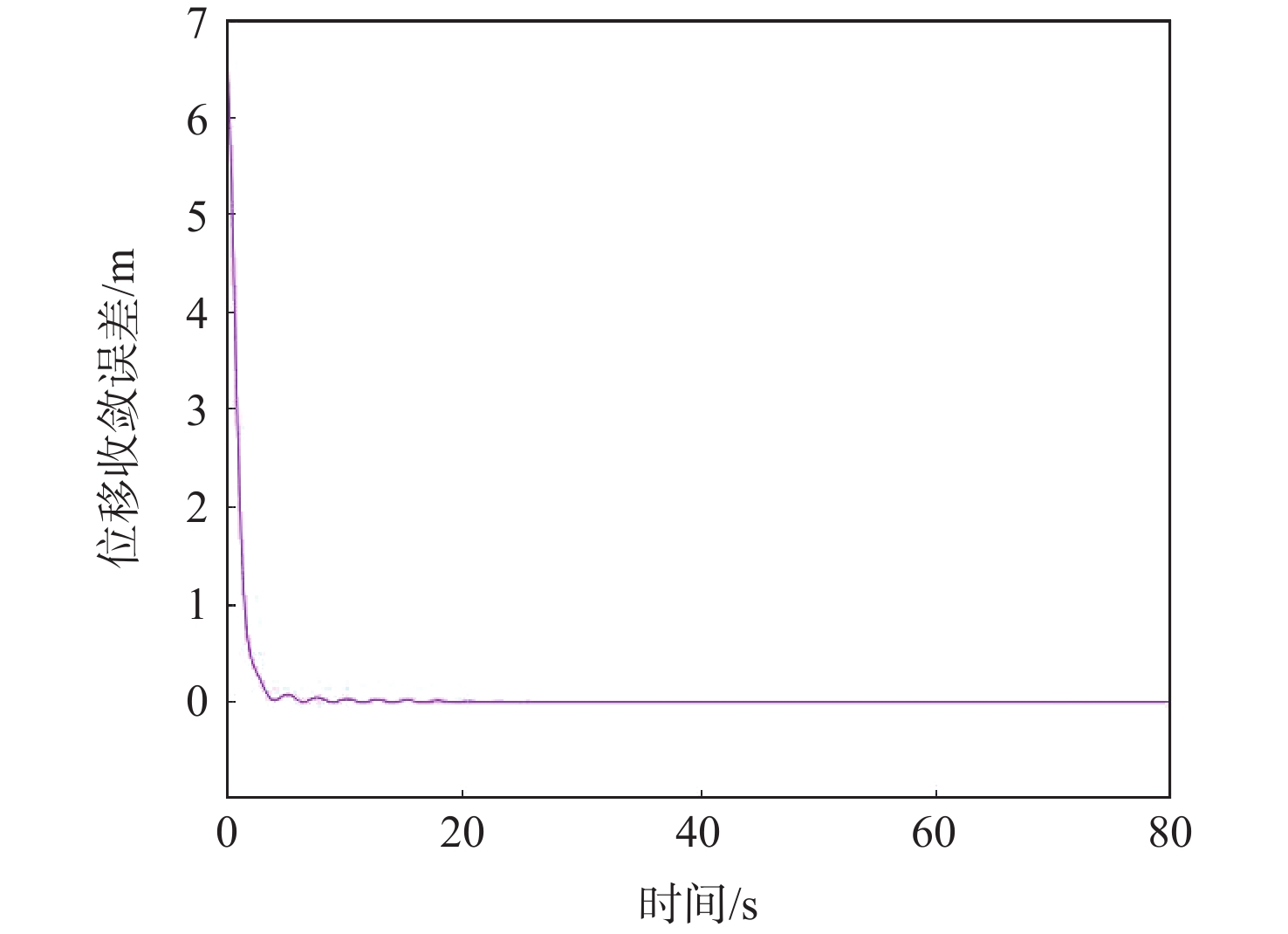
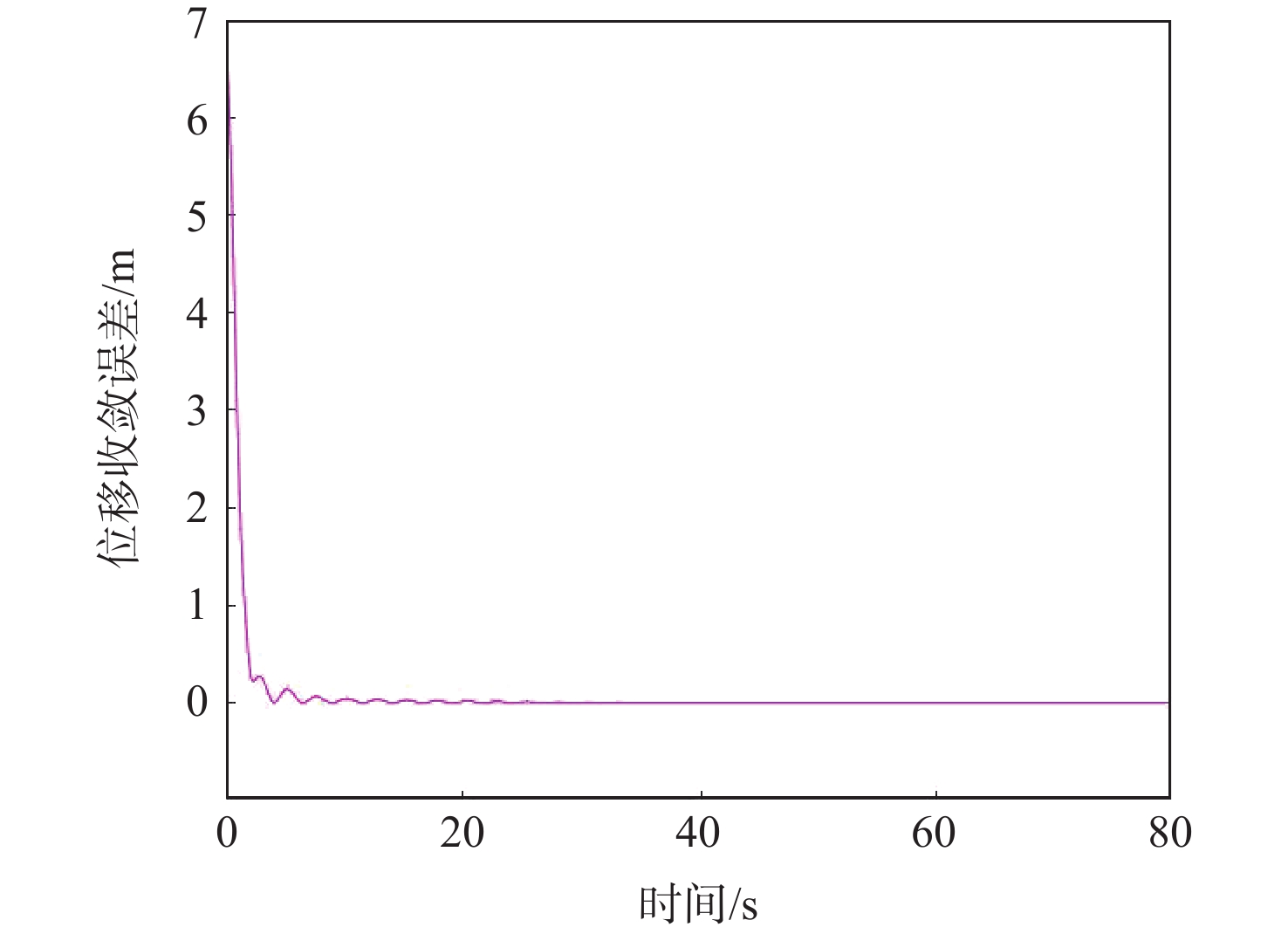
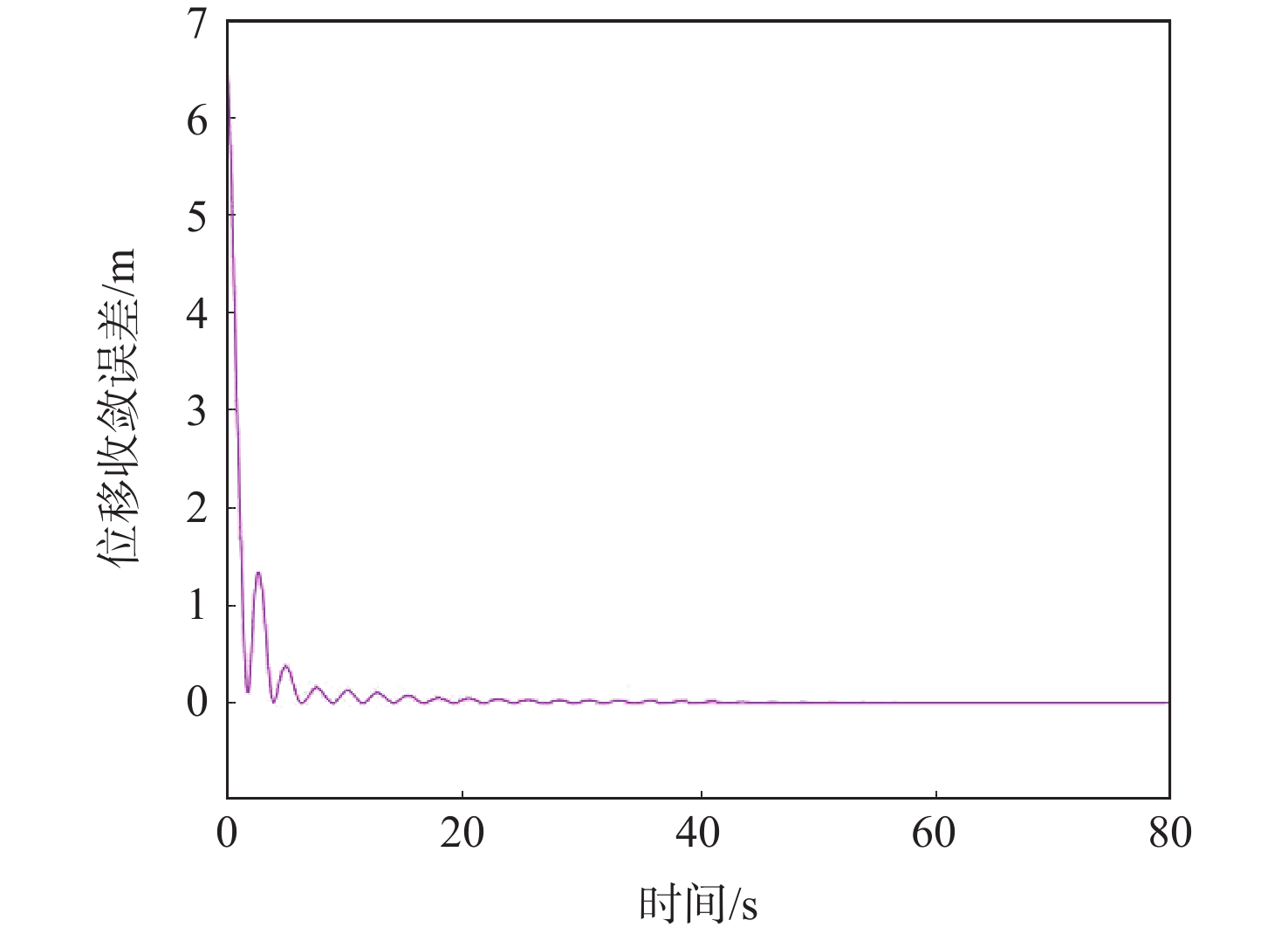
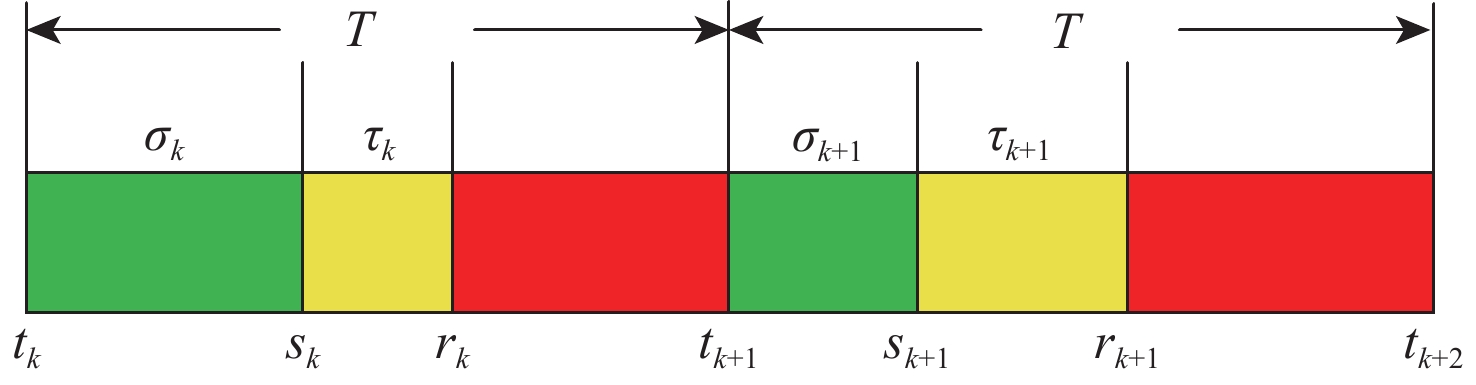
In practical applications, continuous communication cannot be guaranteed due to external interference or limited communication ability. Therefore, this study investigates the tracking control problem of second-order multi-agent systems with intermittent communication. To improve the convergence performance of the system when continuous communication is not guaranteed, a second-order consensus tracking control protocol is designed by introducing an aperiodic persistent-hold control strategy. Based on the matrix and graph theory, and combined with bilinear transformation, it is proved that the multi-agent system achieves consensus tracking under the aperiodic intermittent communication. Then, the consensus tracking condition for second-order multi-agent systems with the undirected topology is obtained. Finally, the simulation examples verify the theoretical results.

| [1] |
WANG W, HUANG J S, WEN C Y, et al. Distributed adaptive control for consensus tracking with application to formation control of nonholonomic mobile robots[J]. Automatica, 2014, 50(4): 1254-1263. doi: 10.1016/j.automatica.2014.02.028
|
| [2] |
YANG A, NAEEM W, IRWIN G W, et al. Stability analysis and implementation of a decentralized formation control strategy for unmanned vehicles[J]. IEEE Transactions on Control Systems Technology, 2014, 22(2): 706-720. doi: 10.1109/TCST.2013.2259168
|
| [3] |
CAI H, HUANG J. Leader-following adaptive consensus of multiple uncertain rigid spacecraft systems[J]. Science China Information Sciences, 2016, 59(1): 1-13.
|
| [4] |
MA R F, CHEN H H, HUANG Y R, et al. Smart grid communication: Its challenges and opportunities[J]. IEEE Transactions on Smart Grid, 2013, 4(1): 36-46. doi: 10.1109/TSG.2012.2225851
|
| [5] |
WEI R, BEARD R W. Consensus algorithms for double-integrator dynamics[J]. Distributed Consensus in Multi-vehicle Cooperative Control: Theory and Applications, 2008: 77-104.
|
| [6] |
WEI Z, CHENG D Z. Leader-following consensus of second-order agents with multiple time-varying delays[J]. Automatica, 2010, 46(12): 1994-1999. doi: 10.1016/j.automatica.2010.08.003
|
| [7] |
WANG F Y, LIU Z X, CHEN Z Q. A novel leader-following consensus of multi-agent systems with smart leader[J]. International Journal of Control, Automation and Systems, 2018, 16(4): 1483-1492. doi: 10.1007/s12555-017-0266-0
|
| [8] |
HONG Y G, HU J P, GAO L X. Tracking control for multi-agent consensus with an active leader and variable topology[J]. Automatica, 2006, 42(7): 1177-1182. doi: 10.1016/j.automatica.2006.02.013
|
| [9] |
HE W L, CHEN G R, HAN Q L, et al. Network-based leader-following consensus of nonlinear multi-agent systems via distributed impulsive control[J]. Information Sciences, 2017, 380: 145-158. doi: 10.1016/j.ins.2015.06.005
|
| [10] |
SU H S, WANG M Z, WANG X, et al. Semiglobal observer-based leader-following consensus with input saturation[J]. IEEE Transactions on Industrial Electronics, 2013, 61(6): 2842-2850.
|
| [11] |
MA C Q, XIE L H. Necessary and sufficient conditions for leader-following bipartite consensus with measurement noise[J]. IEEE Transactions on Systems, Man, and Cybernetics:Systems, 2018, 50(5): 1976-1981.
|
| [12] |
魏志强, 翁哲鸣, 化永朝, 等. 切换拓扑下异构无人集群编队-合围跟踪控制[J]. 航空学报, 2023, 44(2): 326504.
WE Z Q, WENG Z M, HUA Y C, et al. Formation-containment tracking control for heterogeneous unmanned swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(2): 326504(in Chinese).
|
| [13] |
WANG H J, XUE B, XUE A K. Leader-following consensus control for semi-Markov jump multi-agent systems: an adaptive event-triggered scheme[J]. Journal of the Franklin Institute, 2021, 358(1): 428-447. doi: 10.1016/j.jfranklin.2020.10.031
|
| [14] |
WEN G H, DUAN Z S, YU W W, et al. Consensus of second-order multi-agent systems with delayed nonlinear dynamics and intermittent communications[J]. International Journal of Control, 2013, 86(2): 322-331. doi: 10.1080/00207179.2012.727473
|
| [15] |
FAN Z P, SU H S, CHEN S M, et al. Semi-global leader-following coordination of multi-agent systems with input saturation and aperiodic intermittent communications[J]. Journal of the Franklin Institute, 2019, 356(2): 1051-1066. doi: 10.1016/j.jfranklin.2018.05.005
|
| [16] |
HUANG N, DUAN Z S, ZHAO Y. Leader-following consensus of second-order non-linear multi-agent systems with directed intermittent communication[J]. IET Control Theory & Applications, 2014, 8(10): 782-795.
|
| [17] |
HU A H, CAO J D, HU M F. Consensus of leader-following multi-agent systems in time-varying networks via intermittent control[J]. International Journal of Control, Automation and Systems, 2014, 12(5): 969-976. doi: 10.1007/s12555-013-0223-5
|
| [18] |
WANG F Y, LIU Z X, CHEN Z Q. Leader-following consensus of second-order nonlinear multi-agent systems with intermittent position measurements[J]. Science China Information Sciences, 2019, 62(10): 1-16.
|
| [19] |
GUO Y, QIAN Y, WANG P F. Leader-following consensus of delayed multi-agent systems with aperiodically intermittent communications[J]. Neurocomputing, 2021, 466: 49-57. doi: 10.1016/j.neucom.2021.09.014
|
| [20] |
MU R, WEI A, LI H, et al. Leader-following consensus for multi-agent systems with actuator faults via adaptive event-triggered control[J]. Journal of the Franklin Institute, 2021, 358(2): 1327-1349. doi: 10.1016/j.jfranklin.2020.11.027
|
| [21] |
LIU C L, LIU S, ZHANG Y, et al. Consensus seeking of multi-agent systems with intermittent communication: A persistent-hold control strategy[J]. International Journal of Control, 2020, 93(9): 2161-2167. doi: 10.1080/00207179.2018.1548784
|
| [22] |
HORN R A, JOHNSON C R. Matrix analysis[M]. Cambridge: Cambridge University Press , 1985.
|
| [23] |
LIU C L, ZHANG Y, CHEN Y Y. Persistent-hold consensus control of first-order multi-agent systems with intermittent communication[C]//23rd International Symposium on Mathematical Theory of Networks and Systems, 2018.
|
Figures(7)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: