| Citation: | WANG Z Q,LI J,LI J,et al. UAV swarm decision methods under weak information interaction conditions[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3489-3499 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0066

|
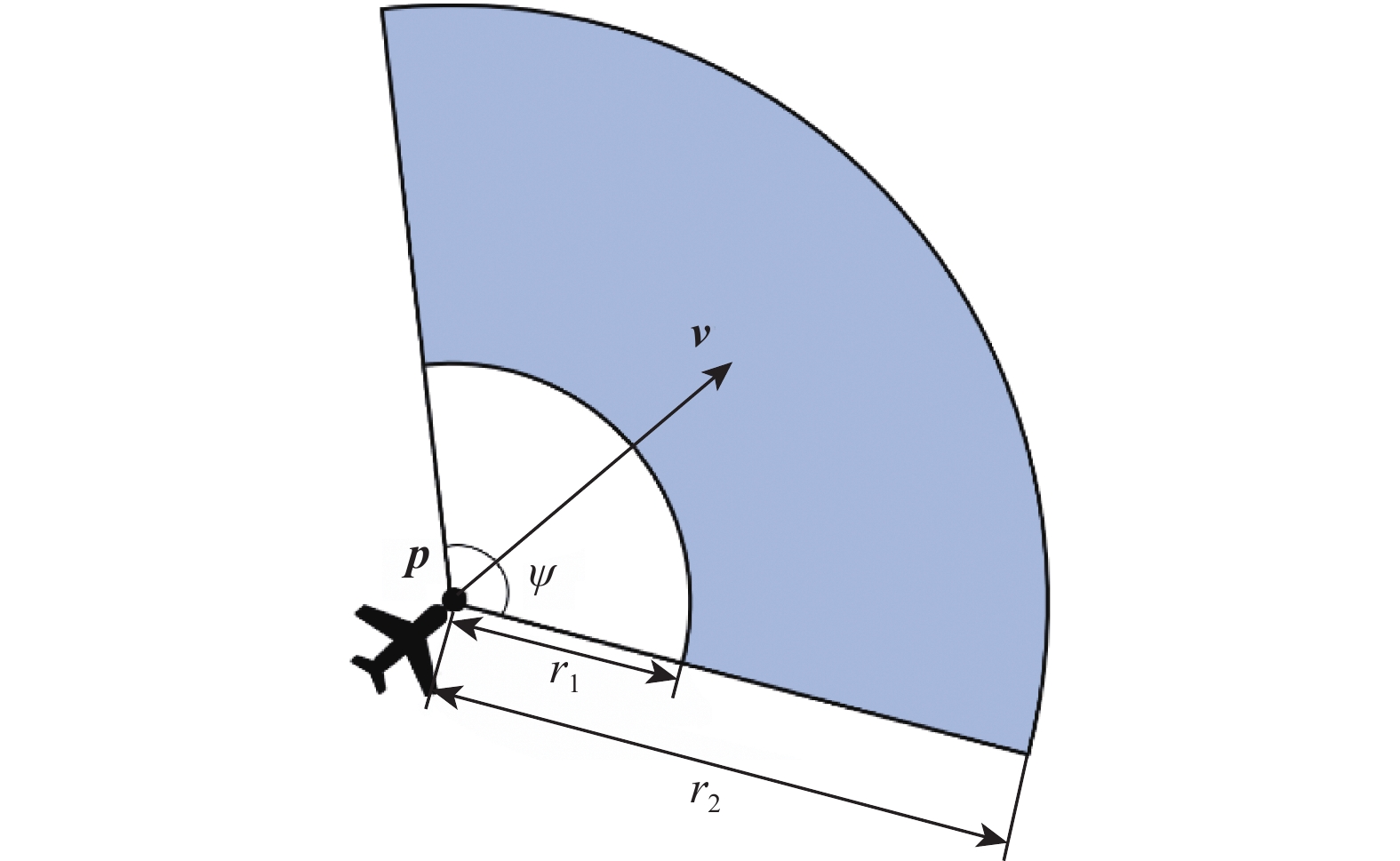
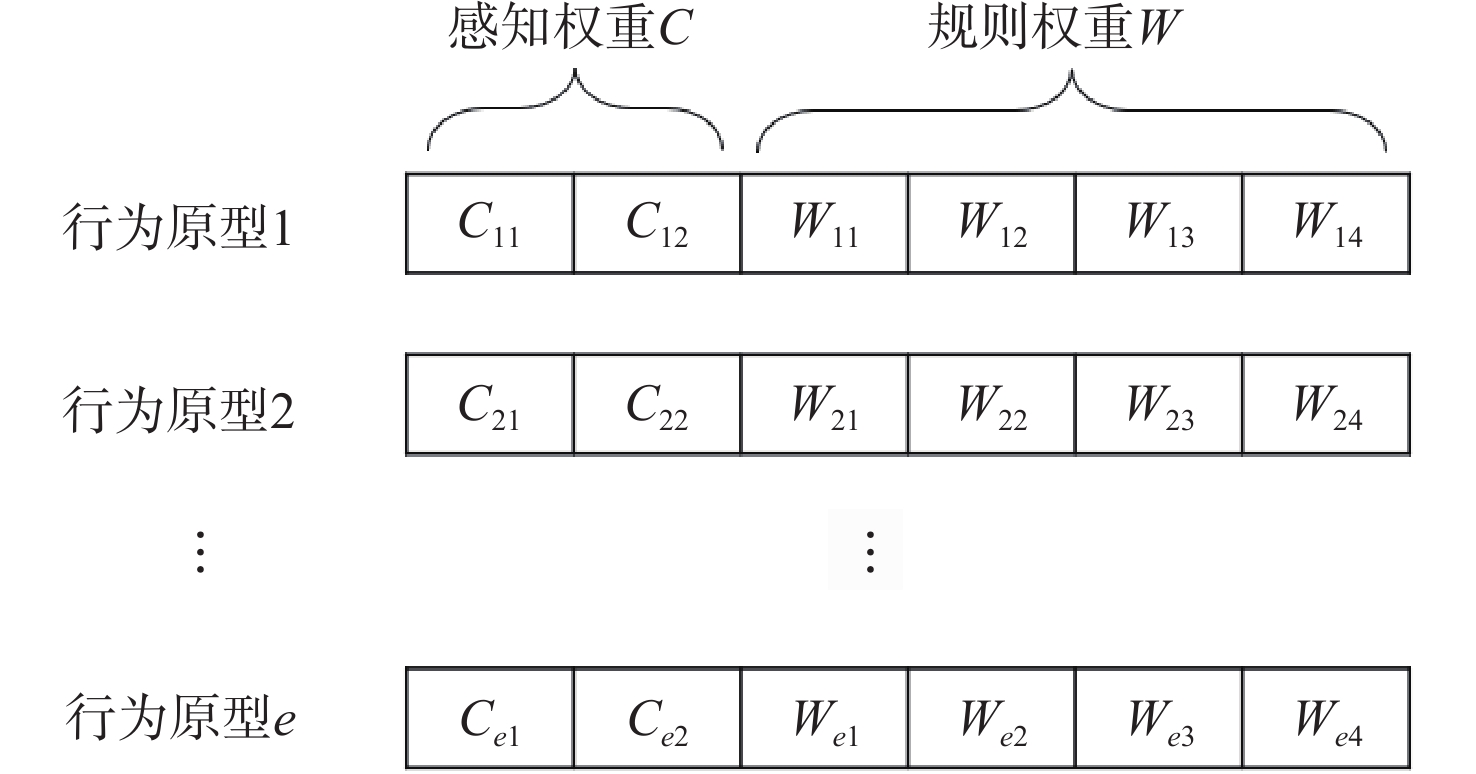
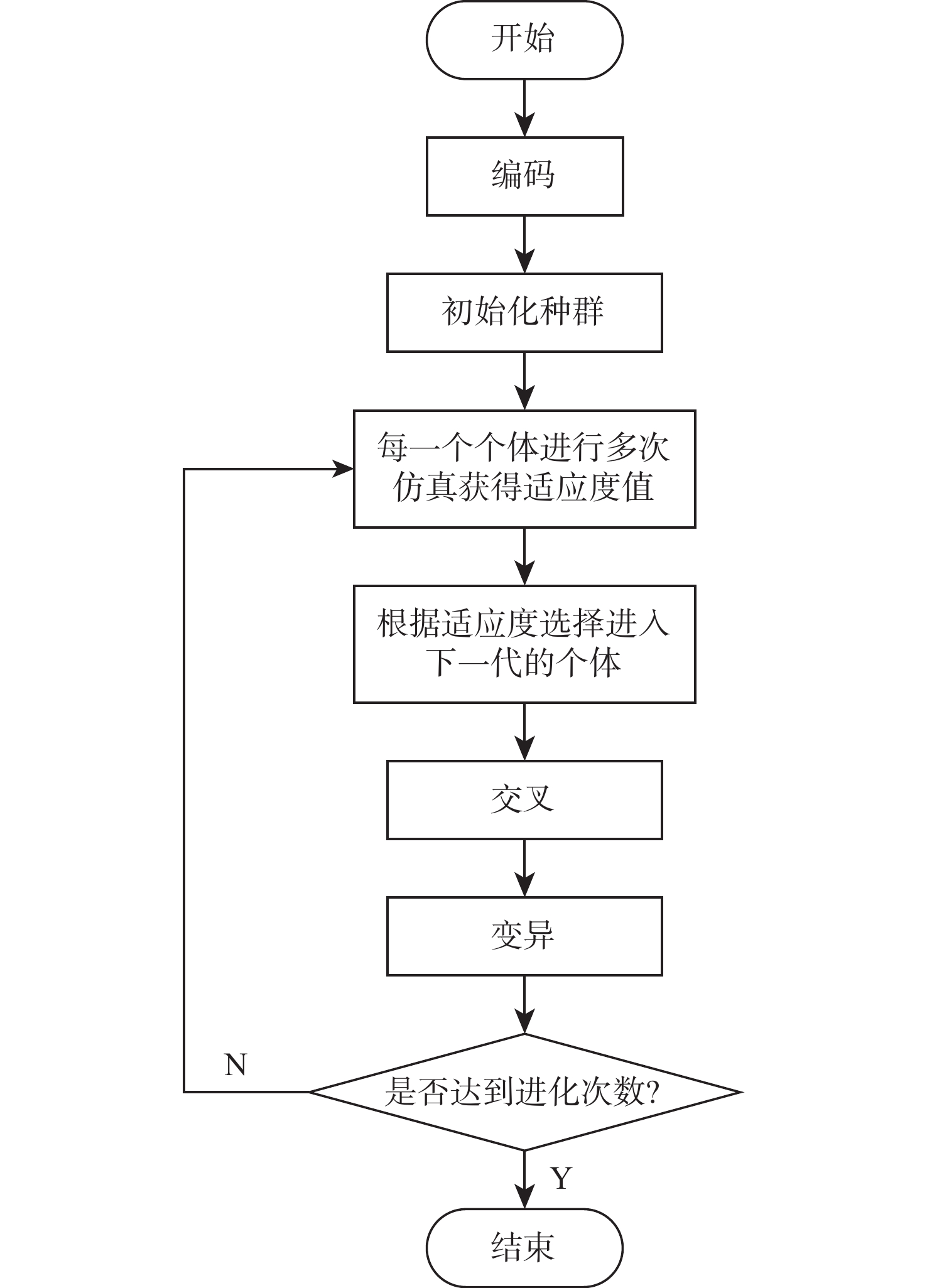
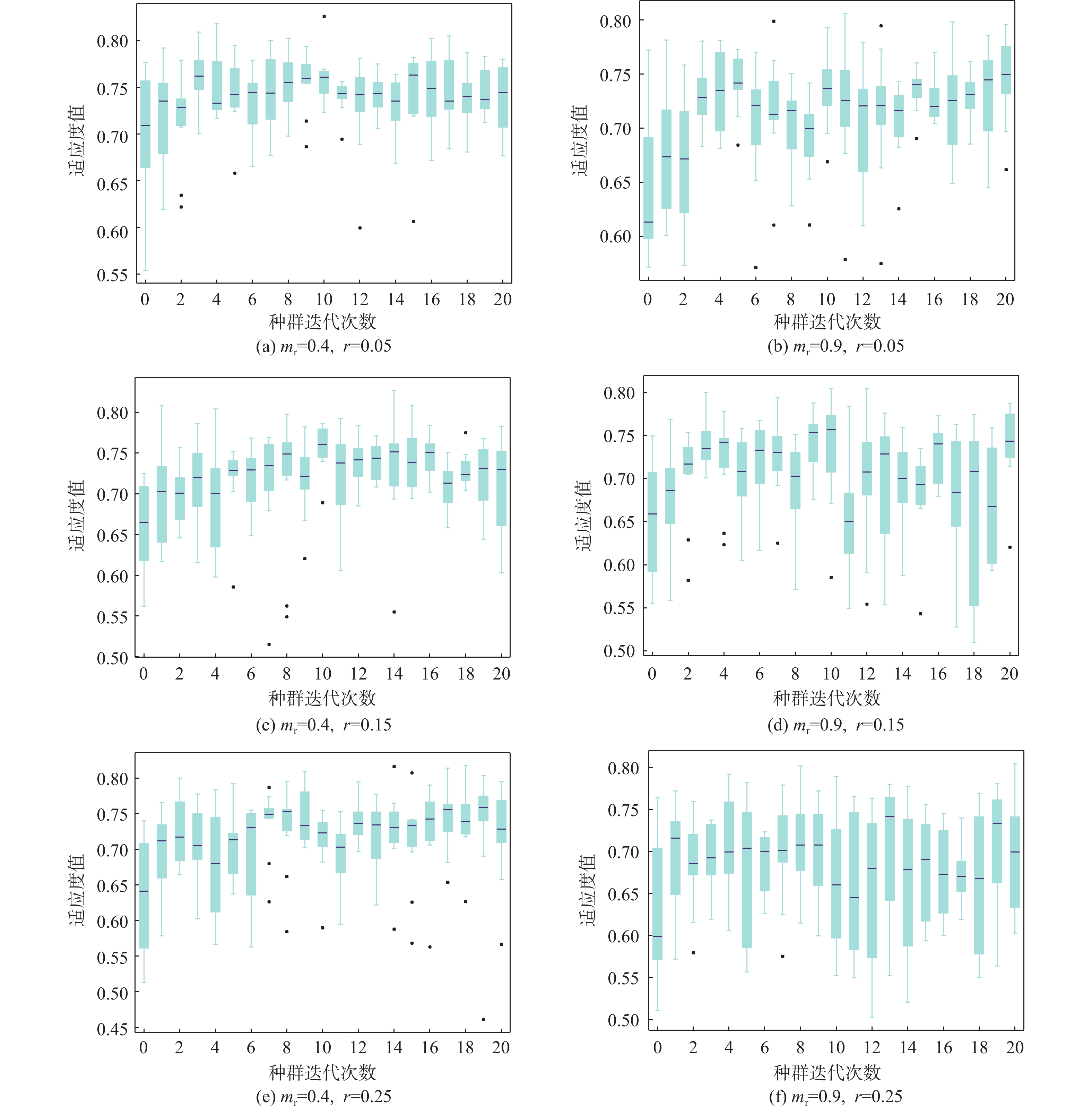
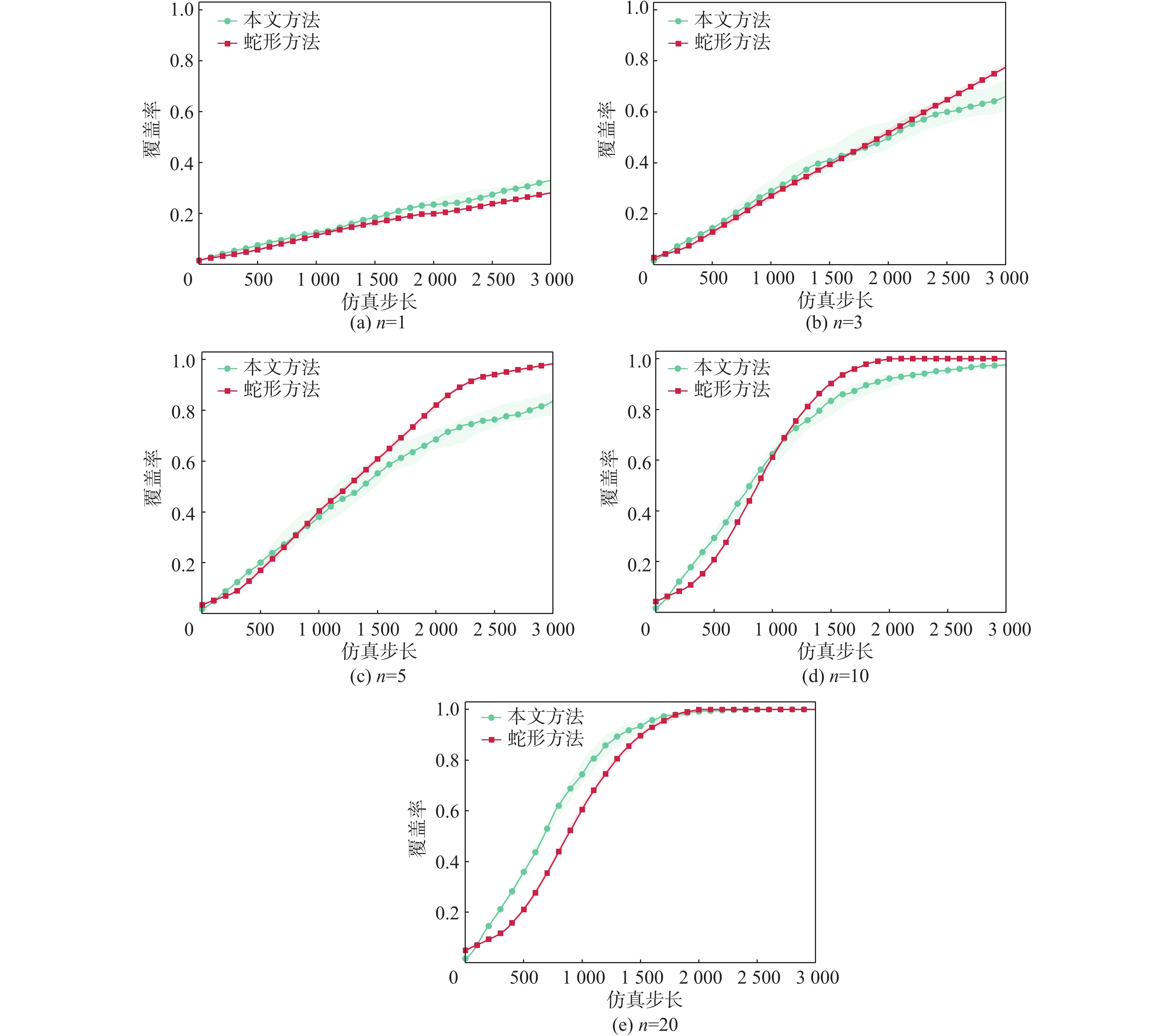
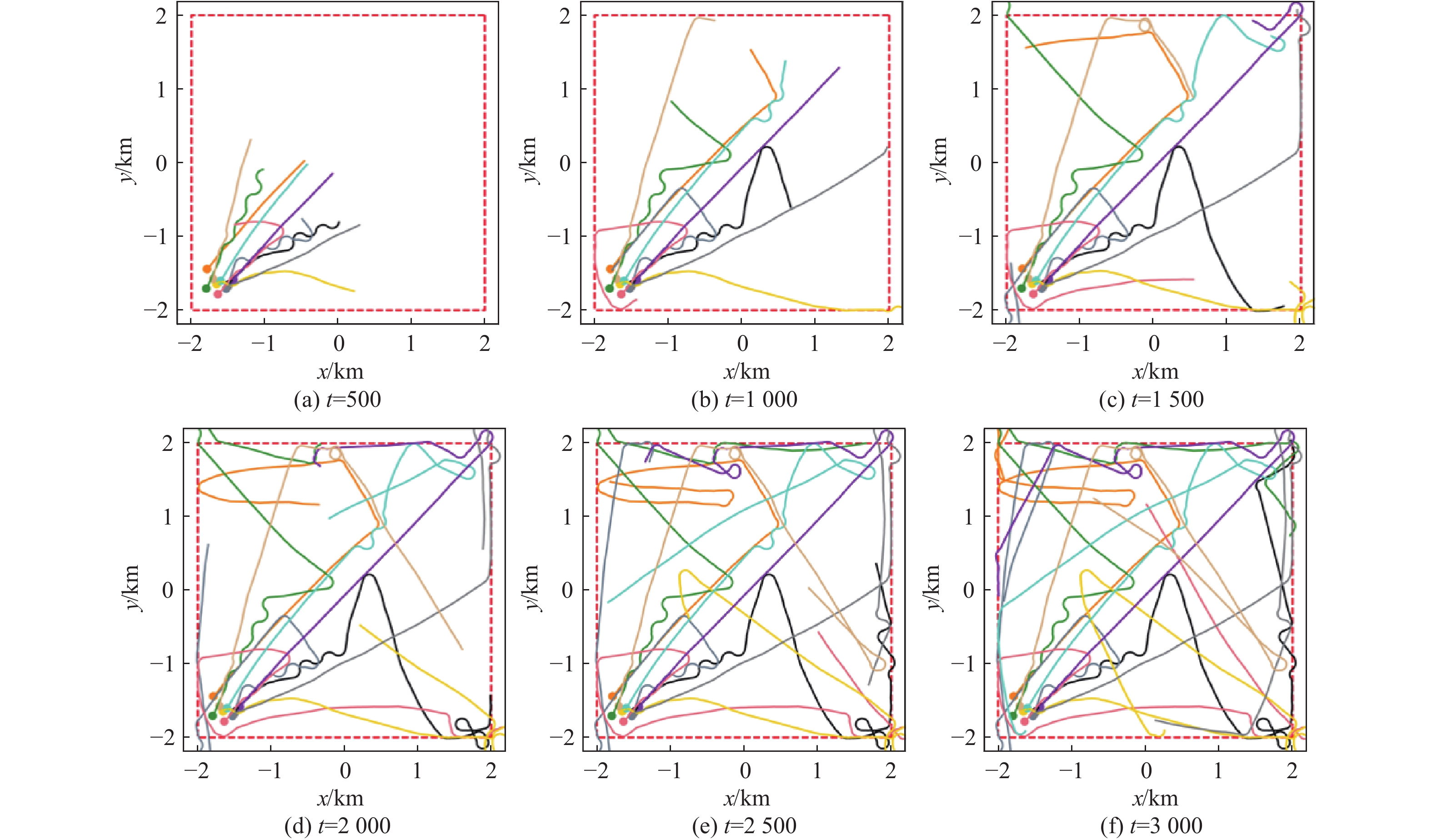
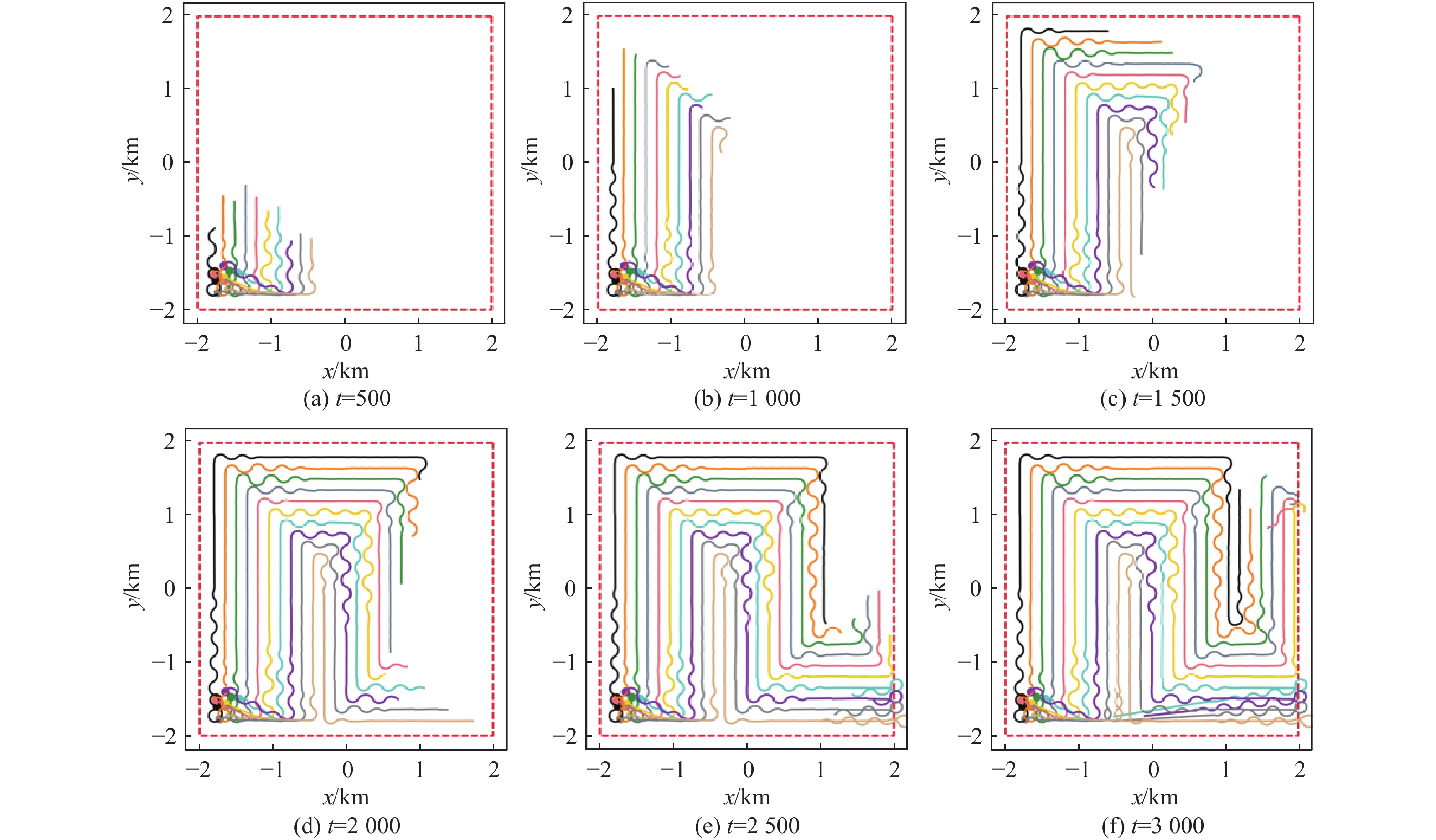
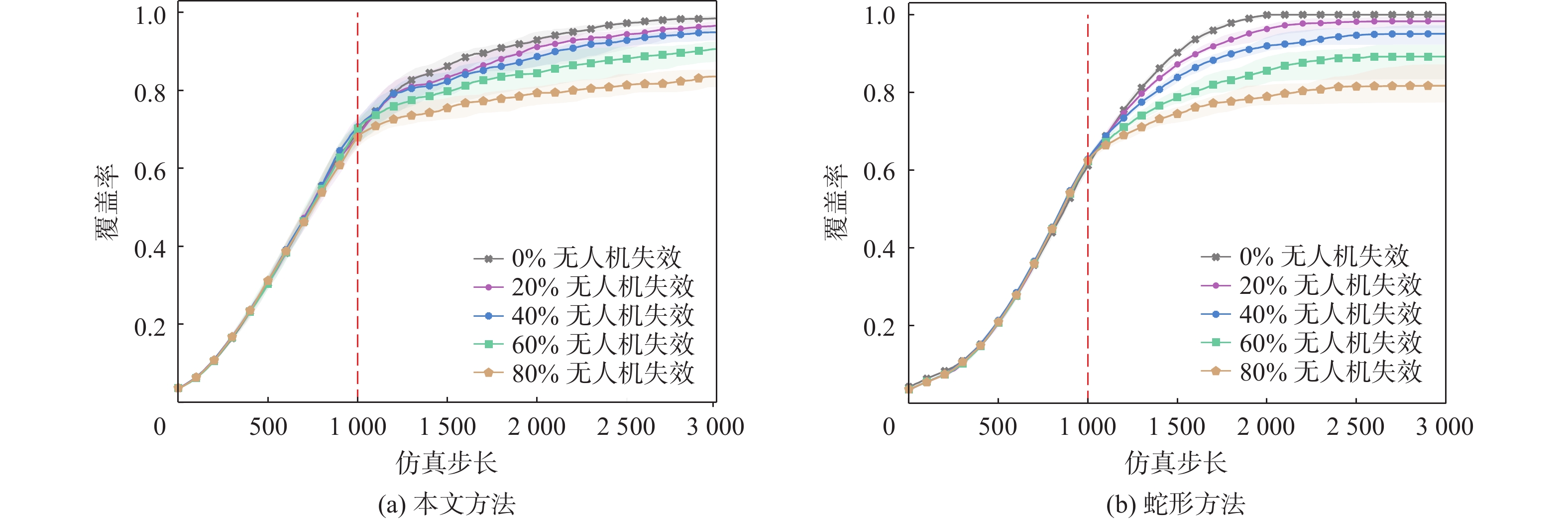
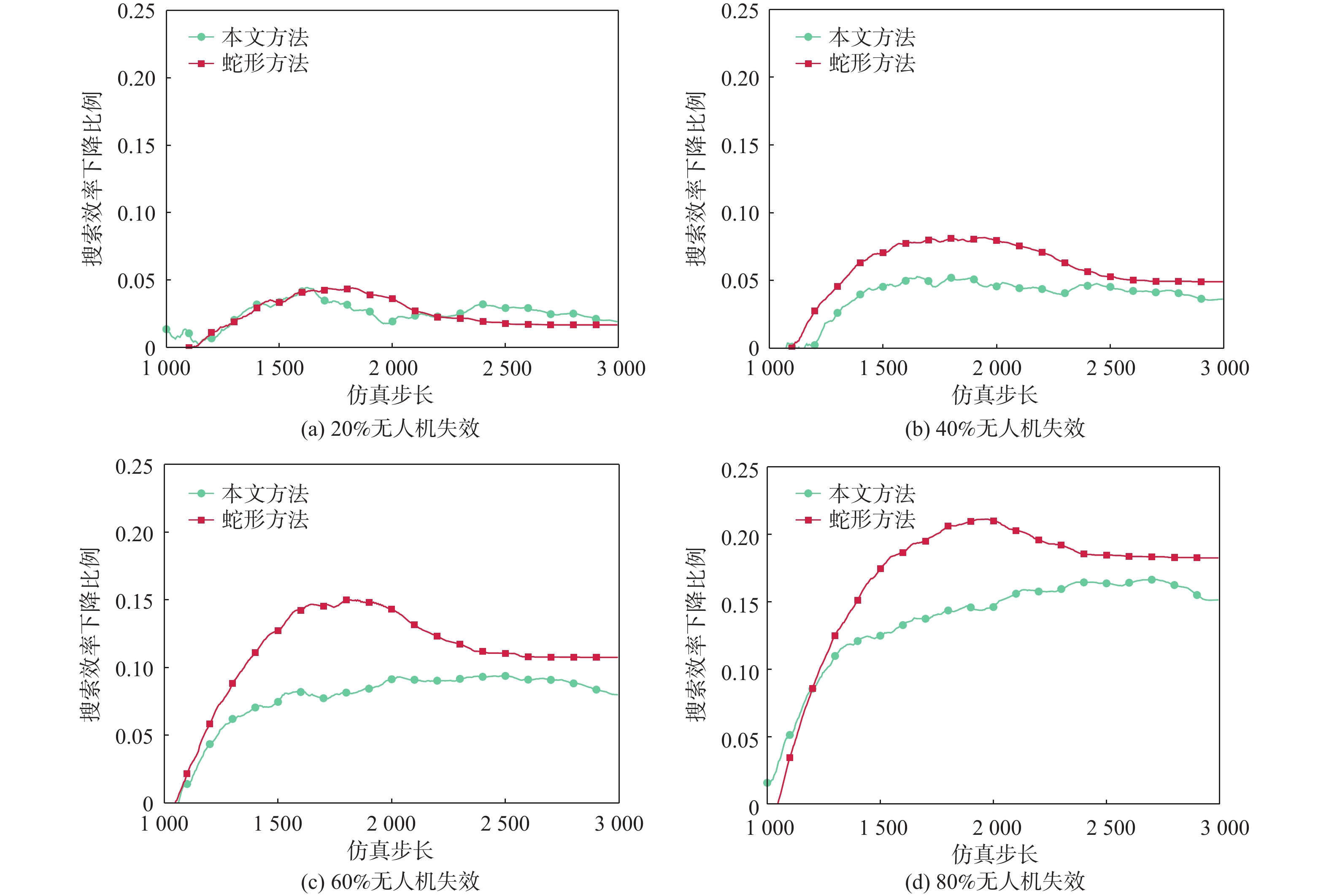
The development of unmanned systems and intelligent technology has presented a broad application prospect of UAV swarms, one of the typical applications of unmanned systems in both civilian and military fields. When the swarm size is large, however, the traditional networking communication method will be limited by bandwidth and interference, which greatly affects the cooperative combat effectiveness of UAV swarms. This paper proposes a weak information interaction UAV swarm model (WIIUSM), not relying on two-way data interaction between UAVs but achieving the desired swarm behavior by using only one-way visual perception. Firstly, this paper establishes a weak information-interaction UAV swarm model. Next, an improved genetic algorithm (IGA) is used as an optimization method for the decision model, and several simulation tests are conducted with the area search task. A comparison with the snake search method based on top-level planning reveals the effectiveness of search efficiency of the proposed method. The degradation of search effectiveness under the conditions of different proportions of UAV failure is also tested, showing the robustness of our methods compared with the snake method.

| [1] |
MICHAEL F. Unmanned combat air vehicles: Opportunities for the guided weapons industry?[R]. Londn: Royal United Services Institute for Defence and Security Studies, 2008.
|
| [2] |
牛轶峰, 沈林成, 戴斌, 等. 无人作战系统发展[J]. 国防科技, 2009, 30(5): 1-11. doi: 10.3969/j.issn.1671-4547.2009.05.001
NIU Y F, SHEN L C, DAI B, et al. A survey of unmanned combat system development[J]. National Defense Science & Technology, 2009, 30(5): 1-11(in Chinese). doi: 10.3969/j.issn.1671-4547.2009.05.001
|
| [3] |
杜梓冰, 张立丰, 陈敬志, 等. 有人/无人机协同作战演示验证试飞关键技术[J]. 航空兵器, 2019, 26(4): 75-81. doi: 10.12132/ISSN.1673-5048.2018.0089
DU Z B, ZHANG L F, CHEN J Z, et al. Critical technologies of demonstration flight test of cooperative operation for manned/unmanned aerial vehicles[J]. Aero Weaponry, 2019, 26(4): 75-81(in Chinese). doi: 10.12132/ISSN.1673-5048.2018.0089
|
| [4] |
BEN-ASHER Y, FELDMAN S, GURFIL P, et al. Distributed decision and control for cooperative UAVs using Ad-Hoc communication[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 511-516. doi: 10.1109/TCST.2007.906314
|
| [5] |
KIM S W, SEO S W. Cooperative unmanned autonomous vehicle control for spatially secure group communications[J]. IEEE Journal on Selected Areas in Communications, 2012, 30(5): 870-882. doi: 10.1109/JSAC.2012.120604
|
| [6] |
REZENDE C, BOUKERCHE A, ALMULLA M, et al. The selective use of redundancy for video streaming over vehicular Ad Hoc networks[J]. Computer Networks, 2015, 81: 43-62. doi: 10.1016/j.comnet.2014.12.010
|
| [7] |
姜胜园. 无线通信信道建模与物理层安全传输应用研究[D]. 杭州: 浙江工业大学, 2018.
JIANG S Y. Research on wireless communication channel modeling and physical layer security transmission application[D]. Hangzhou: Zhejiang University of Technology, 2018(in Chinese).
|
| [8] |
梁晓龙, 孙强, 尹忠海, 等. 大规模无人系统集群智能控制方法综述[J]. 计算机应用研究, 2015, 32(1): 11-16. doi: 10.3969/j.issn.1001-3695.2015.01.003
LIANG X L, SUN Q, YIN Z H, et al. Review on large-scale unmanned system swarm intelligence control method[J]. Application Research of Computers, 2015, 32(1): 11-16(in Chinese). doi: 10.3969/j.issn.1001-3695.2015.01.003
|
| [9] |
GAZI V, PASSINO K M. Stability analysis of swarms[J]. IEEE Transactions on Automatic Control, 2003, 48(4): 692-697. doi: 10.1109/TAC.2003.809765
|
| [10] |
曹丹丹. 无线紫外光协作无人机编队通信拓扑优化方法研究[D]. 西安: 西安理工大学, 2021.
CAO D D. Research on wireless ultraviolet collaborative UAV formation communication topology optimization method[D]. Xi’an: Xi’an University of Technology, 2021(in Chinese).
|
| [11] |
赵诗雪. 无线紫外光协作无人机最优持久编队算法研究[D]. 西安: 西安理工大学, 2020.
ZHAO S X. Research on optimal persistent formation algotithm of wireless ultraviolet collaboration UAV[D]. Xi’an: Xi’an University of Technology, 2020(in Chinese).
|
| [12] |
HOLLAND J H. Adaptation in natural and artificial systems: An introductory analysis with applications to biology, control, and artificial intelligence[M]. Cambridge: MIT Press, 1992.
|
| [13] |
KHOEI T T, GHRIBI E, RANGANATHAN P, et al. A performance comparison of encryption/decryption algorithms for UAV swarm communications[J]. Academic Press, 2021, 1: 1-5.
|
| [14] |
XIAO W J, LI M, ALZAHRANI B, et al. A blockchain-based secure crowd monitoring system using UAV swarm[J]. IEEE Network, 2021, 35(1): 108-115. doi: 10.1109/MNET.011.2000210
|
| [15] |
GHIGLINO P, LAPPAS V. Quaternion error based optimal attitude control applied to pinpoint landing: AIAA 2015-1998[R]. Reston: AIAA, 2015.
|
Figures(10) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: