| Citation: | YAN H B,XU W B,HUANG L E. Design of quadrotor attitude controller based on improved ADRC[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3283-3292 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0129

|
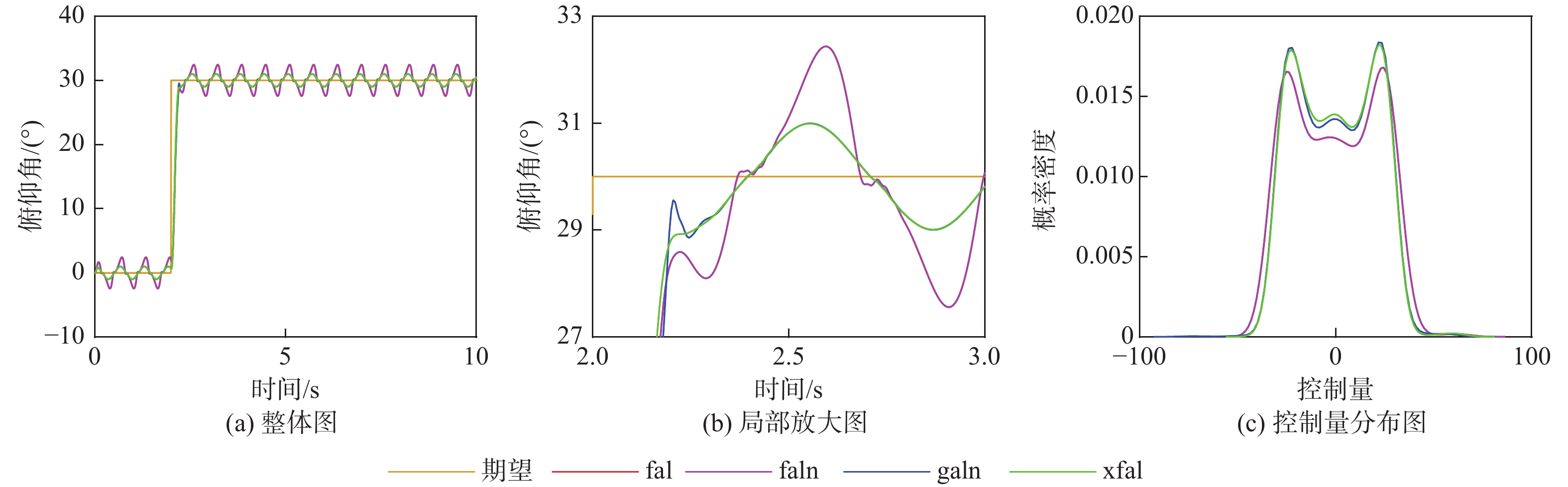
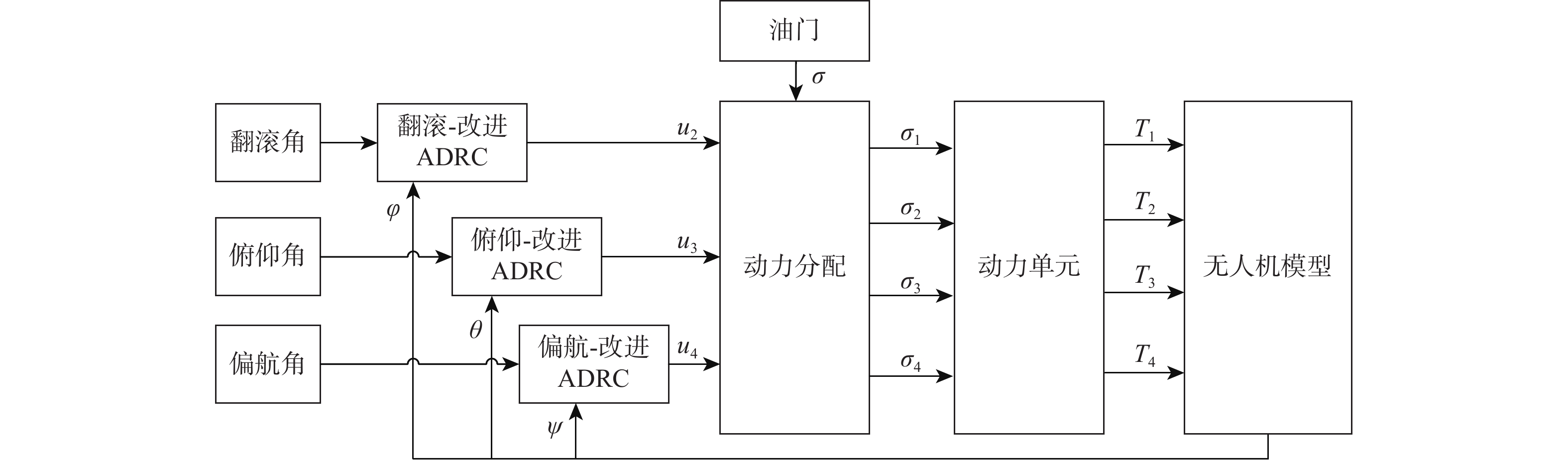
An improved active disturbance rejection control (ADRC) was proposed for quadrotor attitude control to address the extended state observer (ESO) based on the traditional fal function's problems with easy chattering and insufficient anti-interference ability when responding to complex disturbances. A new smooth nonlinear xfal function was constructed based on the sine function to improve ESO. The stability of the improved ESO was proved by Lyapunov function. Finally, the improved ADRC was compared with other ADRCs through simulation platform. The results demonstrate that when compared to the standard ADRC, the mean square error of the pitch angle is reduced by approximately 38.7% in its chattering interval, and by approximately 78.4%, 80.2%, and 83.3% in their respective calculation intervals when the quadrotor was subjected to continuous interference, sudden interference, and complex interference, respectively. This indicates that the improved ADRC has excellent anti-interfere capabilities.

| [1] |
李俊芳, 李峰, 吉月辉, 等. 四旋翼无人机轨迹稳定跟踪控制[J]. 控制与决策, 2020, 35(2): 349-356. doi: 10.13195/j.kzyjc.2018.0639
LI J F, LI F, JI Y H, et al. Trajectory stable tracking control of quadrotor UAV[J]. Control and Decision, 2020, 35(2): 349-356(in Chinese). doi: 10.13195/j.kzyjc.2018.0639
|
| [2] |
PETRLÍK M, BÁČA T, HEŘT D, et al. A robust UAV system for operations in a constrained environment[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2169-2176. doi: 10.1109/LRA.2020.2970980
|
| [3] |
ZHOU L H, ZHANG J Q, DOU J X, et al. A fuzzy adaptive backstepping control based on mass observer for trajectory tracking of a quadrotor UAV[J]. International Journal of Adaptive Control and Signal Processing, 2018, 32(12): 1675-1693. doi: 10.1002/acs.2937
|
| [4] |
QI G Y, HUANG D H. Modeling and dynamical analysis of a small-scale unmanned helicopter[J]. Nonlinear Dynamics, 2019, 98(3): 2131-2145. doi: 10.1007/s11071-019-05313-x
|
| [5] |
JITHU G, JAYASREE P R. Quadrotor modelling and control[C]// 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT). Piscataway: IEEE Press, 2016: 1167-1172.
|
| [6] |
NGUYEN K D, HA C. Design of synchronization controller for the station-keeping hovering mode of quad-rotor unmanned aerial vehicles[J]. International Journal of Aeronautical and Space Sciences, 2019, 20(1): 228-237. doi: 10.1007/s42405-018-0115-2
|
| [7] |
华和安, 方勇纯, 钱辰, 等. 基于线性滤波器的四旋翼无人机强化学习控制策略[J]. 电子与信息学报, 2021, 43(12): 3407-3417. doi: 10.11999/JEIT210251
HUA H A, FANG Y C, QIAN C, et al. Reinforcement learning control strategy of quadrotor unmanned aerial vehicles based on linear filter[J]. Journal of Electronics & Information Technology, 2021, 43(12): 3407-3417(in Chinese). doi: 10.11999/JEIT210251
|
| [8] |
SAIF A W A, ALIYU A, AL DHAIFALLAH M, et al. Decentralized backstepping control of a quadrotor with tilted-rotor under wind gusts[J]. International Journal of Control, Automation and Systems, 2018, 16(5): 2458-2472. doi: 10.1007/s12555-017-0099-x
|
| [9] |
张钊, 杨忠, 段雨潇, 等. 主动变形四旋翼自抗扰飞行控制方法[J]. 控制理论与应用, 2021, 38(4): 444-456. doi: 10.7641/CTA.2020.00344
ZHANG Z, YANG Z, DUAN Y X, et al. Active disturbance rejection control method for actively deformable quadrotor[J]. Control Theory & Applications, 2021, 38(4): 444-456(in Chinese). doi: 10.7641/CTA.2020.00344
|
| [10] |
唐志勇, 马福源, 裴忠才. 四旋翼的改进PSO-RBF神经网络自适应滑模控制[J]. 北京航空航天大学学报, 2023, 49(7): 1563-1572. doi: 10.13700/j.bh.1001-5965.2021.0477
TANG Z Y, MA F Y, PEI Z C. Improved PSO-RBF neural network adaptive sliding mode control for quadrotor systems[J]. Journal of Beijing University of Aeronautics and Astronautics, 2023, 49(7): 1563-1572(in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0477
|
| [11] |
高俊山, 段立勇, 邓立为. 四旋翼无人机抗干扰轨迹跟踪控制[J]. 控制与决策, 2021, 36(2): 379-386. doi: 10.13195/j.kzyjc.2019.0875
GAO J S, DUAN L Y, DENG L W. Anti-interference trajectory tracking control of quadrotor UAV[J]. Control and Decision, 2021, 36(2): 379-386(in Chinese). doi: 10.13195/j.kzyjc.2019.0875
|
| [12] |
HAN J Q. From PID to active disturbance rejection control[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 900-906. doi: 10.1109/TIE.2008.2011621
|
| [13] |
张勇, 陈增强, 张兴会, 等. 四旋翼无人机系统PD-ADRC串级控制[J]. 系统工程与电子技术, 2018, 40(9): 2055-2061. doi: 10.3969/j.issn.1001-506X.2018.09.23
ZHANG Y, CHEN Z Q, ZHANG X H, et al. PD-ADRC cascade control for quadrotor system[J]. Systems Engineering and Electronics, 2018, 40(9): 2055-2061(in Chinese). doi: 10.3969/j.issn.1001-506X.2018.09.23
|
| [14] |
王术波, 韩宇, 陈建, 等. 基于ADRC迭代学习控制的四旋翼无人机姿态控制[J]. 航空学报, 2020, 41(12): 324112.
WANG S B, HAN Y, CHEN J, et al. Active disturbance rejection control of UAV attitude based on iterative learning control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(12): 324112(in Chinese).
|
| [15] |
陈增强, 李毅, 孙明玮, 等. 四旋翼无人飞行器ADRC-GPC控制[J]. 哈尔滨工业大学学报, 2016, 48(9): 176-180. doi: 10.11918/j.issn.0367-6234.2016.09.030
CHEN Z Q, LI Y, SUN M W, et al. ADRC-GPC control of a quad-rotor unmanned aerial vehicle[J]. Journal of Harbin Institute of Technology, 2016, 48(9): 176-180(in Chinese). doi: 10.11918/j.issn.0367-6234.2016.09.030
|
| [16] |
张勇, 陈增强, 张兴会, 等. 基于自抗扰的四旋翼无人机动态面姿态控制[J]. 吉林大学学报(工学版), 2019, 49(2): 562-569. doi: 10.13229/j.cnki.jdxbgxb20171241
ZHANG Y, CHEN Z Q, ZHANG X H, et al. Dynamic surface attitude control of quad-rotor UAV based on ADRC[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(2): 562-569(in Chinese). doi: 10.13229/j.cnki.jdxbgxb20171241
|
| [17] |
石嘉, 裴忠才, 唐志勇, 等. 改进型自抗扰四旋翼无人机控制系统设计与实现[J]. 北京航空航天大学学报, 2021, 47(9): 1823-1831. doi: 10.13700/j.bh.1001-5965.2020.0333
SHI J, PEI Z C, TANG Z Y, et al. Design and realization of an improved active disturbance rejection quadrotor UAV control system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(9): 1823-1831(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0333
|
| [18] |
陈志旺, 张子振, 曹玉洁. 自抗扰fal函数改进及在四旋翼姿态控制中的应用[J]. 控制与决策, 2018, 33(10): 1901-1907. doi: 10.13195/j.kzyjc.2017.0606
CHEN Z W, ZHANG Z Z, CAO Y J. Fal function improvement of ADRC and its application in quadrotor aircraft attitude control[J]. Control and Decision, 2018, 33(10): 1901-1907(in Chinese). doi: 10.13195/j.kzyjc.2017.0606
|
| [19] |
杨文奇, 卢建华, 姜旭, 等. 基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44(12): 3792-3799. doi: 10.12305/j.issn.1001-506X.2022.12.24
YANG W Q, LU J H, JIANG X, et al. Design of quadrotor attitude active disturbance rejection controller based on improved ESO[J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799(in Chinese). doi: 10.12305/j.issn.1001-506X.2022.12.24
|
| [20] |
杨盛毅, 唐胜景, 刘超, 等. 基于动力系统模型的四旋翼推力估计方法[J]. 北京理工大学学报, 2016, 36(6): 558-562. doi: 10.15918/j.tbit1001-0645.2016.06.002
YANG S Y, TANG S J, LIU C, et al. Thrust estimation of quadrotor based on propulsion system model[J]. Transactions of Beijing Institute of Technology, 2016, 36(6): 558-562(in Chinese). doi: 10.15918/j.tbit1001-0645.2016.06.002
|
| [21] |
于洪国, 康忠健, 陈瑶. 基于双曲正切函数的二阶时变参数扩张状态观测器[J]. 控制理论与应用, 2016, 33(4): 530-534. doi: 10.7641/CTA.2016.50443
YU H G, KANG Z J, CHEN Y. Time-varying parameter second-order extended state observer based on hyperbolic tangent function[J]. Control Theory & Applications, 2016, 33(4): 530-534(in Chinese). doi: 10.7641/CTA.2016.50443
|
| [22] |
周涛. 基于反双曲正弦函数的扩张状态观测器[J]. 控制与决策, 2015, 30(5): 943-946. doi: 10.13195/j.kzyjc.2014.0316
ZHOU T. Extended state observer based on inverse hyperbolic sine function[J]. Control and Decision, 2015, 30(5): 943-946(in Chinese). doi: 10.13195/j.kzyjc.2014.0316
|
| [23] |
ZHAO H X, CHEN S L, LI M. A sufficient condition for the stability of the third-order extended state observer[C]// Proceedings of the 32nd Chinese Control Conference. Piscataway: IEEE Press, 2013: 1526-1531.
|
Figures(9) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: