| Citation: | WANG Y X,LI X,CAI Z H,et al. Integrated control method for quadrotors’ aggressive trajectory tracking under multiple constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):48-60 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0208

|
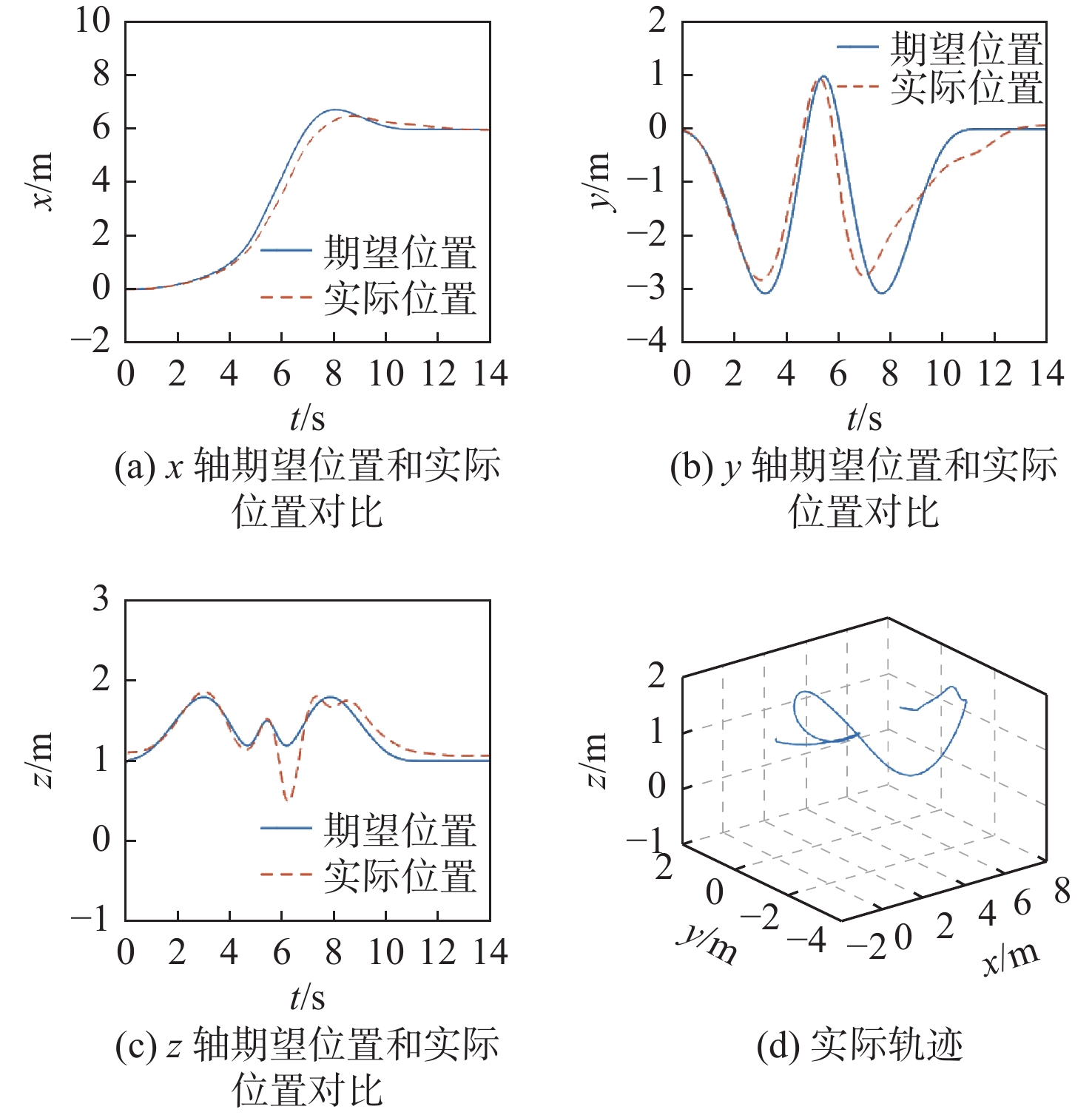
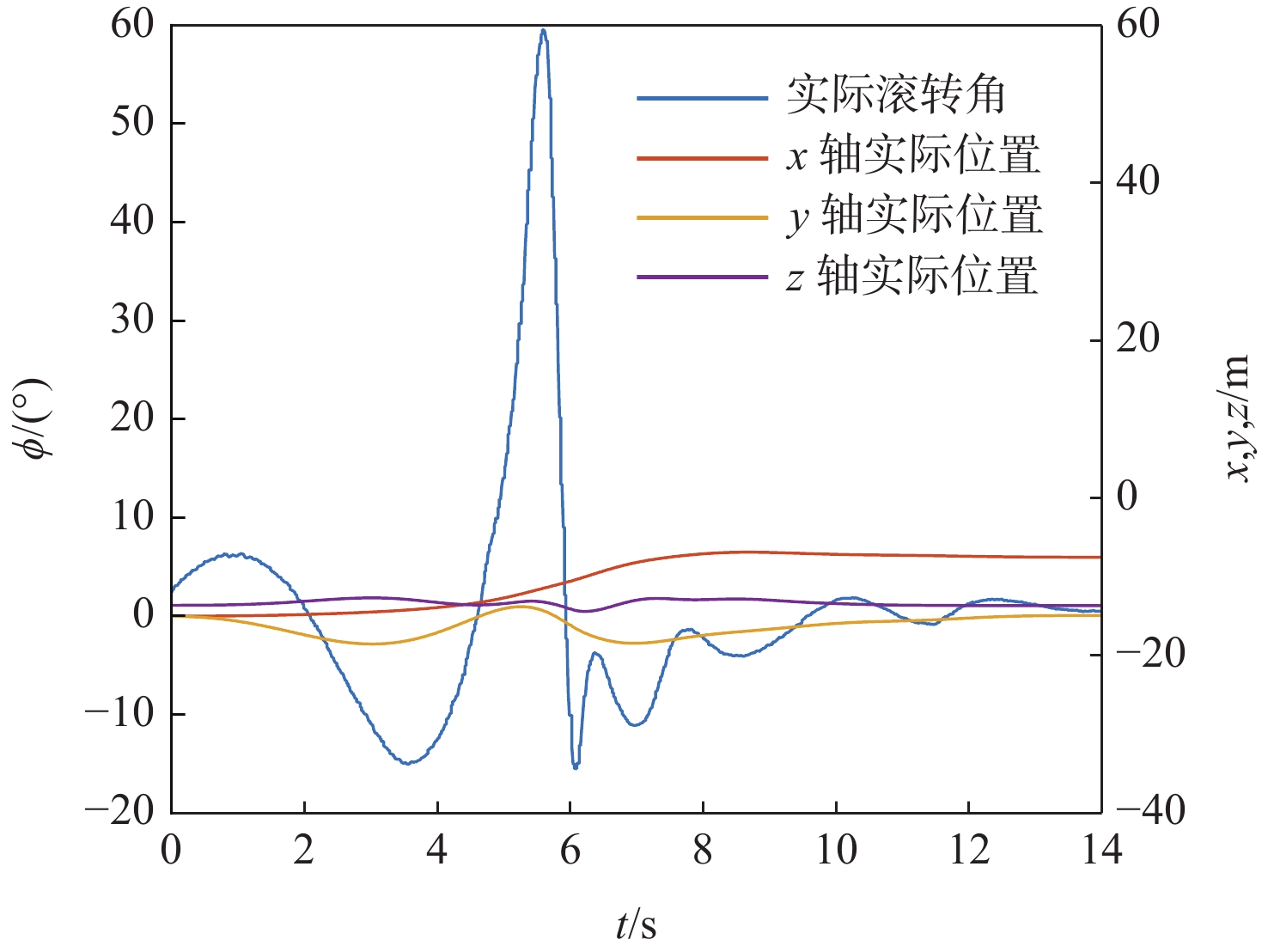
The increasing demand for high-dynamic flight of quadrotors has made it an increasingly popular research topic. In order to solve the state tracking control problem of aggressive trajectories when quadrotors undertake activities such as navigating the cracks in the ruins and the gaps in the forest, this work develops an integrated control strategy based on model predictive control. This technique incorporates integrated tracking control of numerous reference states as well as aggressive trajectory planning under multiple limitations. Flight tests have verified the superior performance of the proposed control method in this paper compared with the feed-forward PID control method in tracking the planned aggressive trajectories. In-flight tests, quadrotors successfully crossed the narrow gap of 60° roll angle, and their actual roll angle reached a large angle of 60°, while the z-axis error is only 0.065 m.

| [1] |
FAESSLER M, FONTANA F, FORSTER C, et al. Autonomous, vision-based flight and live dense 3D mapping with a quadrotor micro aerial vehicle[J]. Journal of Field Robotics, 2016, 33(4): 431-450. doi: 10.1002/rob.21581
|
| [2] |
CASTELLANO G, CASTIELLO C, MENCAR C, et al. Crowd detection in aerial images using spatial graphs and fully-convolutional neural networks[J]. IEEE Access, 2020, 8: 64534-64544. doi: 10.1109/ACCESS.2020.2984768
|
| [3] |
CUSTERS B. The future of drone use[M]. Hague: TMC Asser Press, 2016: 3-20.
|
| [4] |
MARTINEZ C, SAMPEDRO C, CHAUHAN A, et al. Towards autonomous detection and tracking of electric towers for aerial power line inspection[C]// 2014 International Conference on Unmanned Aircraft Systems. Piscataway: IEEE Press, 2014: 284-295.
|
| [5] |
PASCHALL S, ROSE J. Fast, lightweight autonomy through an unknown cluttered environment[C]// 2017 IEEE Aerospace Conference. Piscataway: IEEE Press, 2017: 1-8.
|
| [6] |
FALANGA D, MUEGGLER E, FAESSLER M, et al. Aggressive quadrotor flight through narrow gaps with onboard sensing and computing using active vision[C]// 2017 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2017: 5774-5781.
|
| [7] |
ZHOU B Y, GAO F, WANG L Q, et al. Robust and efficient quadrotor trajectory generation for fast autonomous flight[J]. IEEE Robotics and Automation Letters, 2019, 4(4): 3529-3536. doi: 10.1109/LRA.2019.2927938
|
| [8] |
ZHOU B Y, PAN J, GAO F, et al. RAPTOR: Robust and perception-aware trajectory replanning for quadrotor fast flight[J]. IEEE Transactions on Robotics, 2021, 37(6): 1992-2009. doi: 10.1109/TRO.2021.3071527
|
| [9] |
GAO F, WU W, GAO W L, et al. Flying on point clouds: online trajectory generation and autonomous navigation for quadrotors in cluttered environments[J]. Journal of Field Robotics, 2019, 36(4): 710-733. doi: 10.1002/rob.21842
|
| [10] |
QUAN L, HAN L X, ZHOU B Y, et al. Survey of UAV motion planning[J]. IET Cyber-Systems and Robotics, 2020, 2(1): 14-21. doi: 10.1049/iet-csr.2020.0004
|
| [11] |
FAESSLER M, FALANGA D, SCARAMUZZA D. Thrust mixing, saturation, and body-rate control for accurate aggressive quadrotor flight[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 476-482. doi: 10.1109/LRA.2016.2640362
|
| [12] |
FOEHN P, SCARAMUZZA D. Onboard state dependent LQR for agile quadrotors[C]// 2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2018: 6566-6572.
|
| [13] |
FAESSLER M, FRANCHI A, SCARAMUZZA D. Differential flatness of quadrotor dynamics subject to rotor drag for accurate tracking of high-speed trajectories[J]. IEEE Robotics and Automation Letters, 2018, 3(2): 620-626. doi: 10.1109/LRA.2017.2776353
|
| [14] |
FALANGA D, FOEHN P, LU P, et al. PAMPC: Perception-aware model predictive control for quadrotors[C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2019: 1-8.
|
| [15] |
SUN S, ROMERO A, FOEHN P, et al. A comparative study of nonlinear MPC and differential-flatness-based control for quadrotor agile flight[J]. IEEE Transactions on Robotics, 2022, 38(6): 3357-3373. doi: 10.1109/TRO.2022.3177279
|
| [16] |
HANOVER D, FOEHN P, SUN S H, et al. Performance, precision, and payloads: Adaptive nonlinear MPC for quadrotors[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 690-697. doi: 10.1109/LRA.2021.3131690
|
| [17] |
KOSTADINOV D, SCARAMUZZA D. Online weight-adaptive nonlinear model predictive control[C]// 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2021: 1180-1185.
|
| [18] |
MELLINGER D, KUMAR V. Minimum snap trajectory generation and control for quadrotors[C]// 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2011: 2520-2525.
|

Figures(13) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: