| Citation: | GUAN Y Z,FENG M. Application of active disturbance rejection control in gyro motor steady speed control[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):234-242 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0209

|
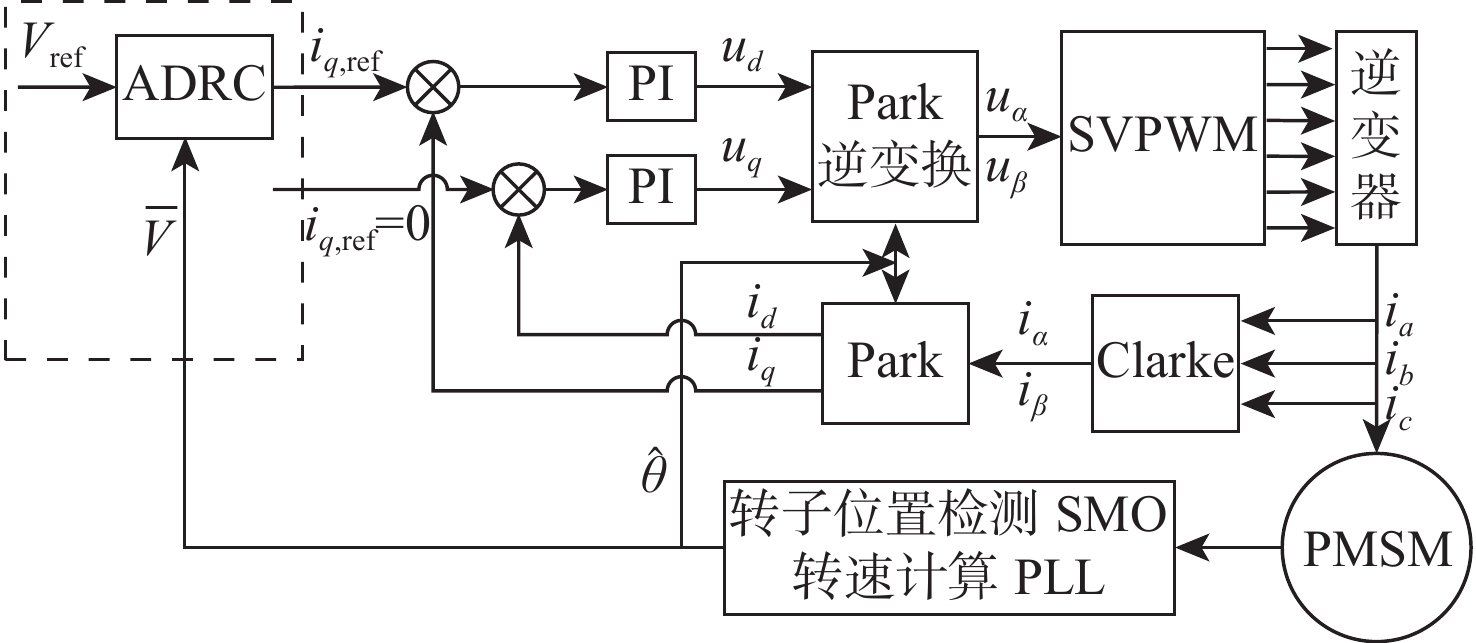
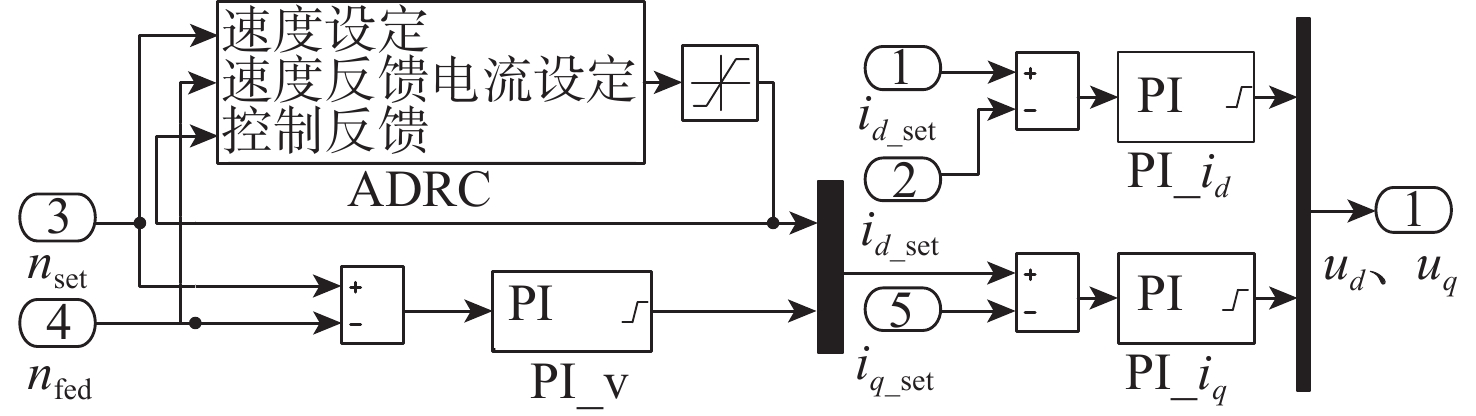
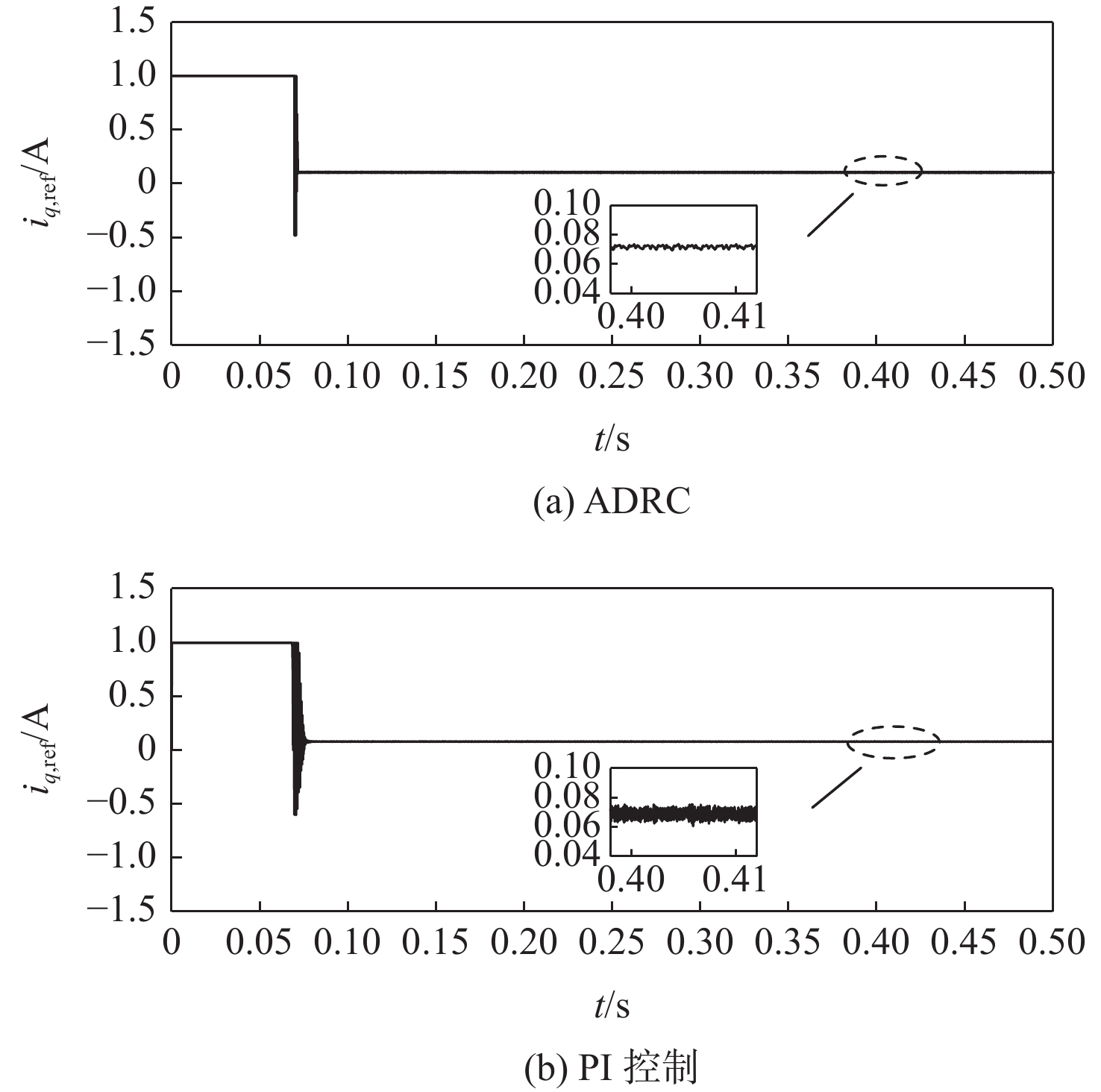
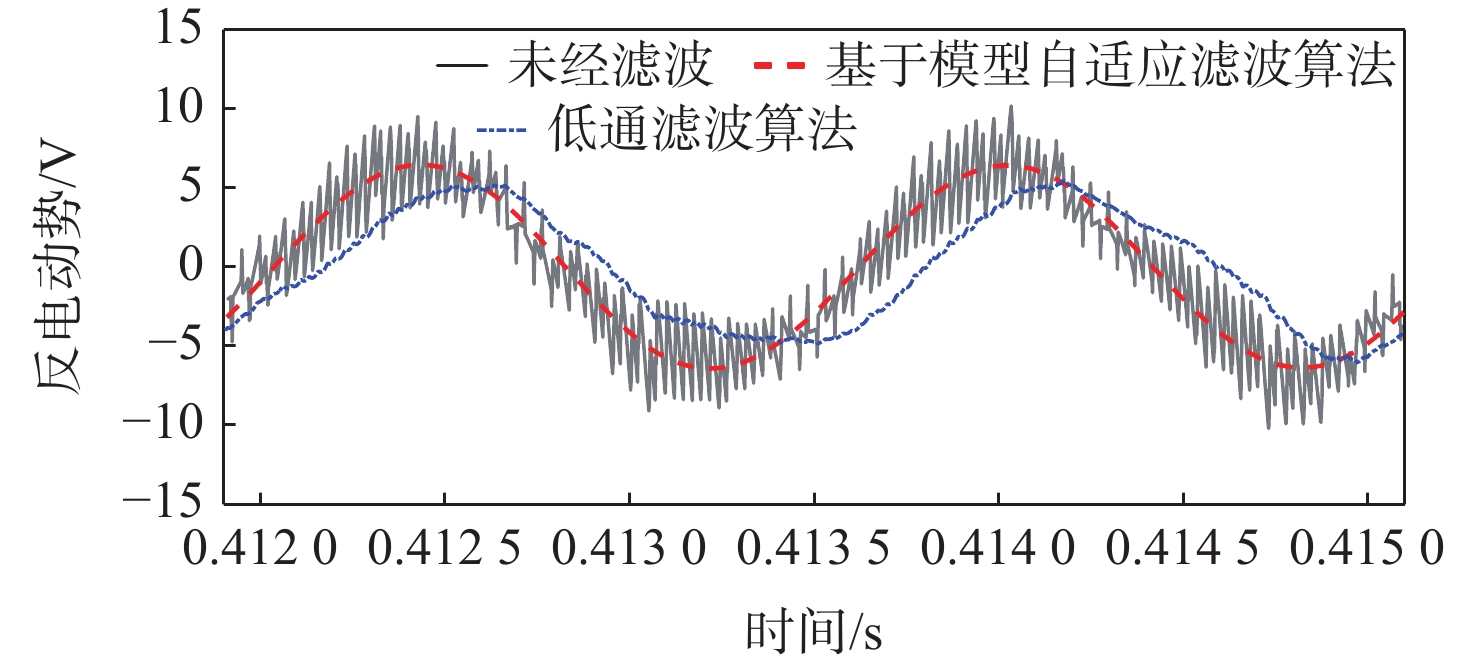
The performance of the gyroscope is impacted by the steadiness of the gyro motor’s rotating speed. To improve the stability control precision of the permanent magnet synchronons gyro motor (PMSGM), propose the method use of the active disturbance rejection control (ADRC) in the speed loop and a model-based adptive filtering algorithm in the filtering process. the ADRC was proposed to replace the traditional proportional integral (PI) control in the speed loop of the gyro motor vector control system to reduce the output jitter of the speed loop and improve the stability precision of gyro motor. While this was going on, a model-based adaptive filtering algorithm was put out to take the place of the conventional low-pass filtering algorithm. This algorithm does away with phase delay correction and produces a smoother, more precise waveform for the predicted back electromotive force. So the accuracy of rotor position angle estimation and steady speed control were improved. Therefore, the PMSGM vector controller was designed. The simulation and experimental results showed that the proposed method was better than traditional control methods, and it could effectively improve the speed control precision of gyro motor.

| [1] |
赵美蓉, 张鑫鑫, 黄银国, 等. 陀螺电机转速稳定性对寻北影响及其稳速控制[J]. 纳米技术与精密工程, 2016, 14(2): 81-86. doi: 10.13494/j.npe.20150076
ZHAO M R, ZHANG X X, HUANG Y G, et al. Effect of stability of rotary speed of gyro motor on north seeking and its speed control[J]. Nanotechnology and Precision Engineering, 2016, 14(2): 81-86(in Chinese). doi: 10.13494/j.npe.20150076
|
| [2] |
SU Y X, ZHENG C H, DUAN B Y. Automatic disturbances rejection controller for precise motion control of permanent-magnet synchronous motors[J]. IEEE Transactions on Industrial Electronics, 2005, 52(3): 814-823. doi: 10.1109/TIE.2005.847583
|
| [3] |
符慧. 永磁同步电机转速环PI控制策略研究 [D]. 南京: 南京航空航天大学, 2017: 21-22.
FU H. Research on PI control strategy of permanent magnet synchronous motor speed loop [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2017: 21-22(in Chinese).
|
| [4] |
韩京清. 自抗扰控制器及其应用[J]. 控制与决策, 1998, 13(1): 19-23. doi: 10.3321/j.issn:1001-0920.1998.01.005
HAN J Q. Active disturbance rejection controller and its application[J]. Control and Decision, 1998, 13(1): 19-23(in Chinese). doi: 10.3321/j.issn:1001-0920.1998.01.005
|
| [5] |
贺虎成, 孙磊, 张玉峰, 等. 基于矢量控制的异步电机自抗扰控制[J]. 电机与控制学报, 2019, 23(4): 120-125. doi: 10.15938/j.emc.2019.04.015
HE H C, SUN L, ZHANG Y F, et al. Asynchronous motor active disturbance rejection control based on vector control[J]. Electric Machines and Control, 2019, 23(4): 120-125(in Chinese). doi: 10.15938/j.emc.2019.04.015
|
| [6] |
GUO B L, BACHA S, ALAMIR M. A review on adrc based pmsm control designs [C]//IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE Press, 2017: 1747-1753.
|
| [7] |
HAN Y, LI H, LI W T. Research on PMSM sensorless system based on ADRC-PBC strategy [C]//2016 Chinese Control and Decision Conference. Piscataway: IEEE Press, 2016: 3186-3191.
|
| [8] |
刘春光, 张征, 陈路明, 等. 电动车用永磁同步电机转速自抗扰控制[J]. 火力与指挥控制, 2020, 45(11): 71-77. doi: 10.3969/j.issn.1002-0640.2020.11.014
LIU C G, ZHANG Z, CHEN L M, et al. Rotating speed active disturbance rejection control for permanent magnet synchronous motor in electric vehicles[J]. Fire Control & Command Control, 2020, 45(11): 71-77(in Chinese). doi: 10.3969/j.issn.1002-0640.2020.11.014
|
| [9] |
孙佃升. 改进滑模观测器的永磁同步电机无传感器控制[J]. 电力电子技术, 2018, 52(2): 54-56.
SUN D S. Sensorless control of PMSM using improved sliding mode observer[J]. Power Electronics, 2018, 52(2): 54-56(in Chinese).
|
| [10] |
HUANG J C, LI H S, XU Q H, et al. Sensorless vector control of PMSM using sliding mode observer and fractional-order phase-locked loop[C]//Proceedings of the 31st Chinese Control Conference. Piscataway: IEEE Press, 2012: 4513-4518.
|
| [11] |
李冉, 龙雪涛, 陈辉. 基于锁相环的永磁同步电机无传感器控制[J]. 电气传动, 2013, 43(8): 8-12. doi: 10.3969/j.issn.1001-2095.2013.08.002
LI R, LONG X T, CHEN H. Sensorless control of permanent magnet synchronous motor based on phase-locked loop[J]. Electric Drive, 2013, 43(8): 8-12(in Chinese). doi: 10.3969/j.issn.1001-2095.2013.08.002
|
| [12] |
郑昌陆, 胡月波, 耿宇翔. 基于锁相环原理的永磁同步电机无传感器控制方法[J]. 电机与控制应用, 2015, 42(3): 24-28. doi: 10.3969/j.issn.1673-6540.2015.03.007
ZHENG C L, HU Y B, GENG Y X. Sensorless control method of permanent magnet synchronous motor based on principle of phase-locked loop[J]. Electric Machines & Control Application, 2015, 42(3): 24-28(in Chinese). doi: 10.3969/j.issn.1673-6540.2015.03.007
|
| [13] |
韩京清. 从PID技术到“自抗扰控制”技术[J]. 控制工程, 2002, 9(3): 13-18. doi: 10.3969/j.issn.1671-7848.2002.03.003
HAN J Q. From PID technique to active disturbances rejection control technique[J]. Basic Automation, 2002, 9(3): 13-18(in Chinese). doi: 10.3969/j.issn.1671-7848.2002.03.003
|
| [14] |
武利强, 林浩, 韩京清. 跟踪微分器滤波性能研究[J]. 系统仿真学报, 2004, 16(4): 651-652. doi: 10.3969/j.issn.1004-731X.2004.04.012
WU L Q, LIN H, HAN J Q. Study of tracking differentiator on filtering[J]. Acta Simulata Systematica Sinica, 2004, 16(4): 651-652(in Chinese). doi: 10.3969/j.issn.1004-731X.2004.04.012
|
| [15] |
REN C, LI X H, YANG X B, et al. Extended state observer-based sliding mode control of an omnidirectional mobile robot with friction compensation[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12): 9480-9489. doi: 10.1109/TIE.2019.2892678
|

Figures(18) / Tables(3)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: