| Citation: | XIE M J,DUAN J Q,MA W R,et al. Sliding mode control for electric braking systems of aircraft based on prescribed performance[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):260-267 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0229

|
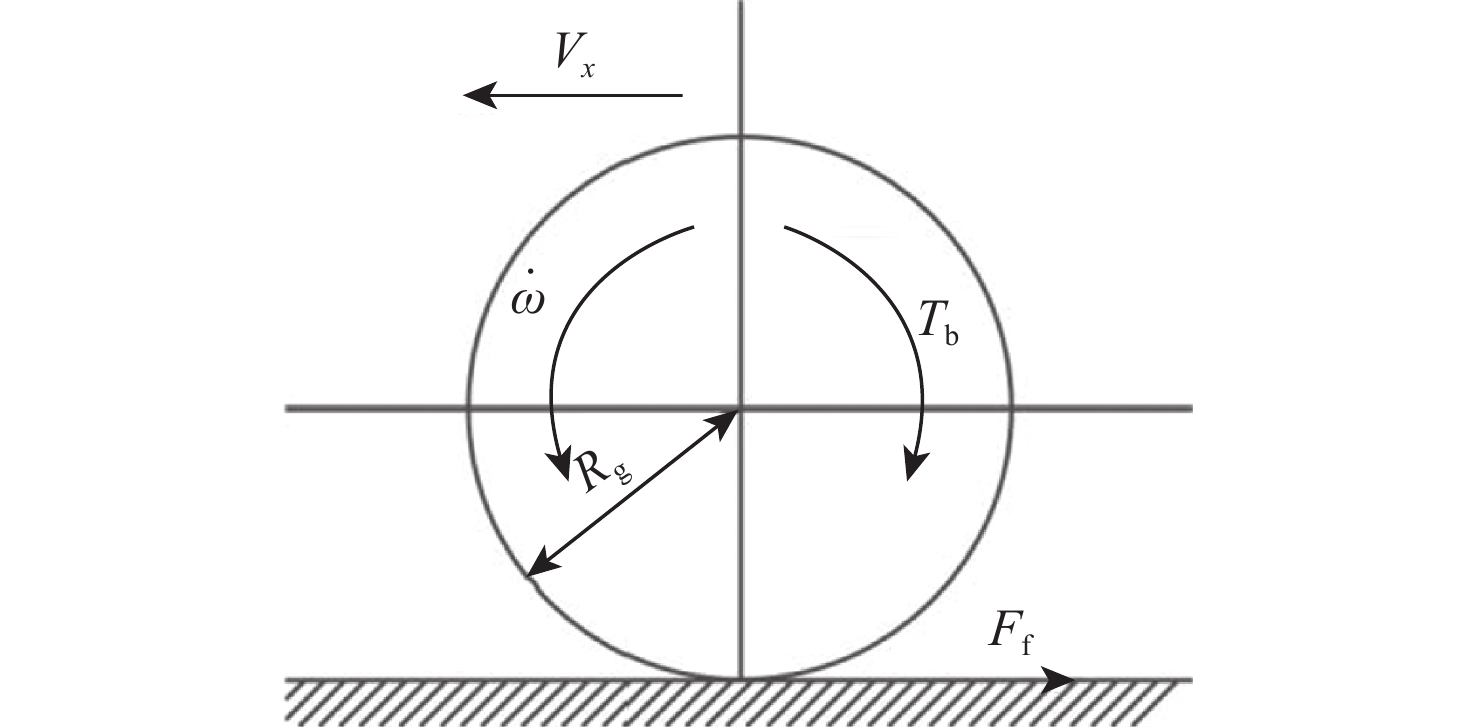
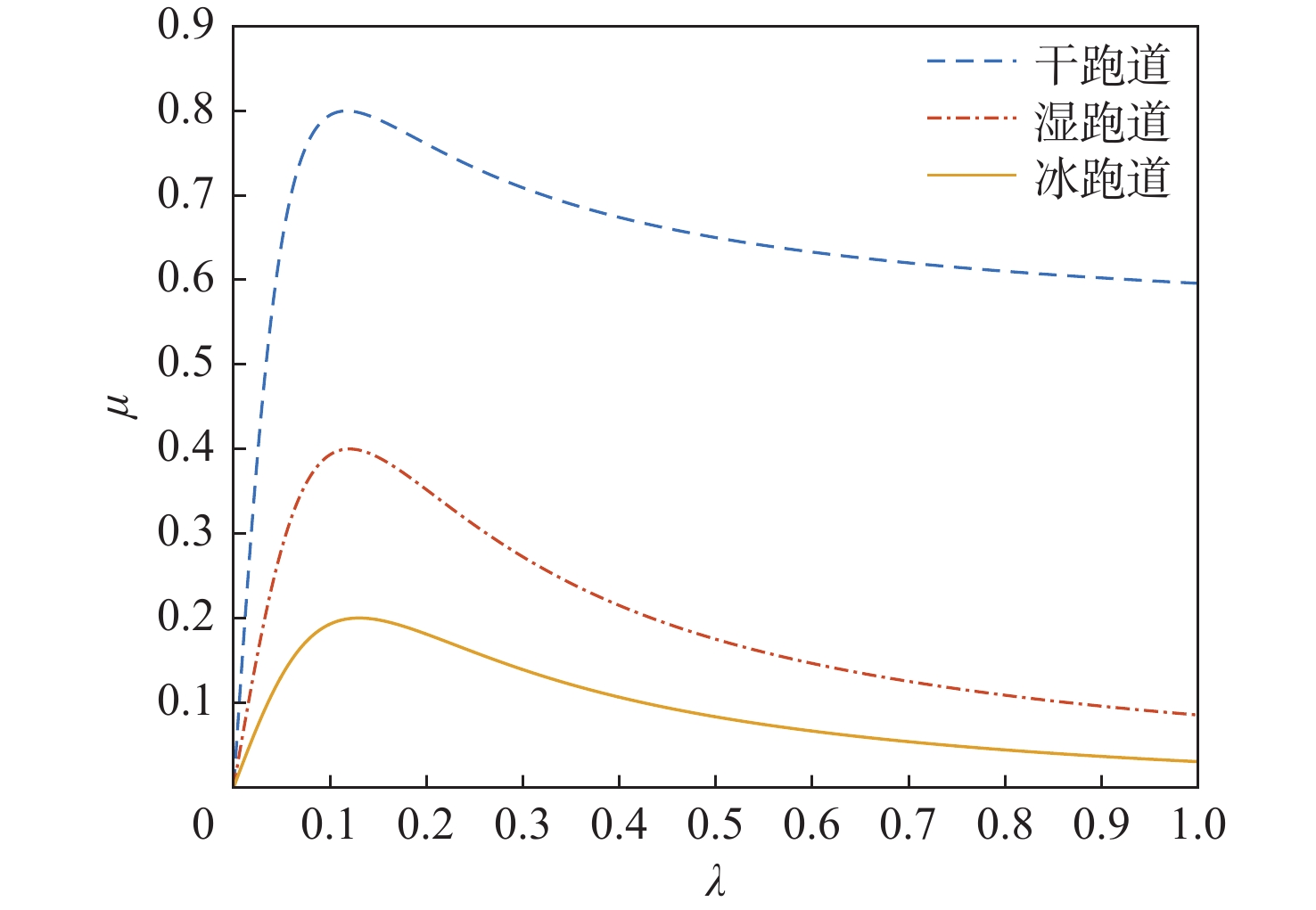
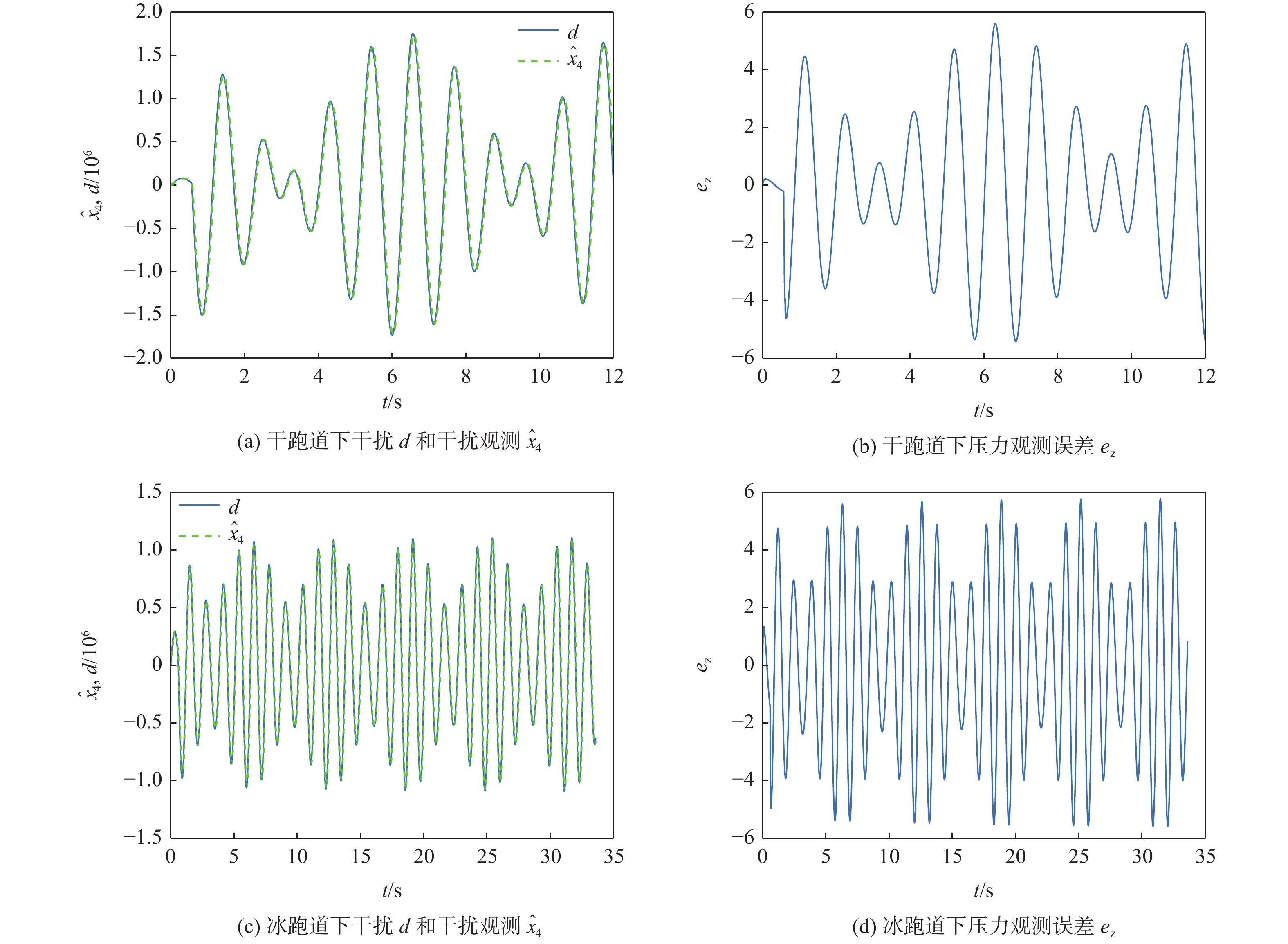
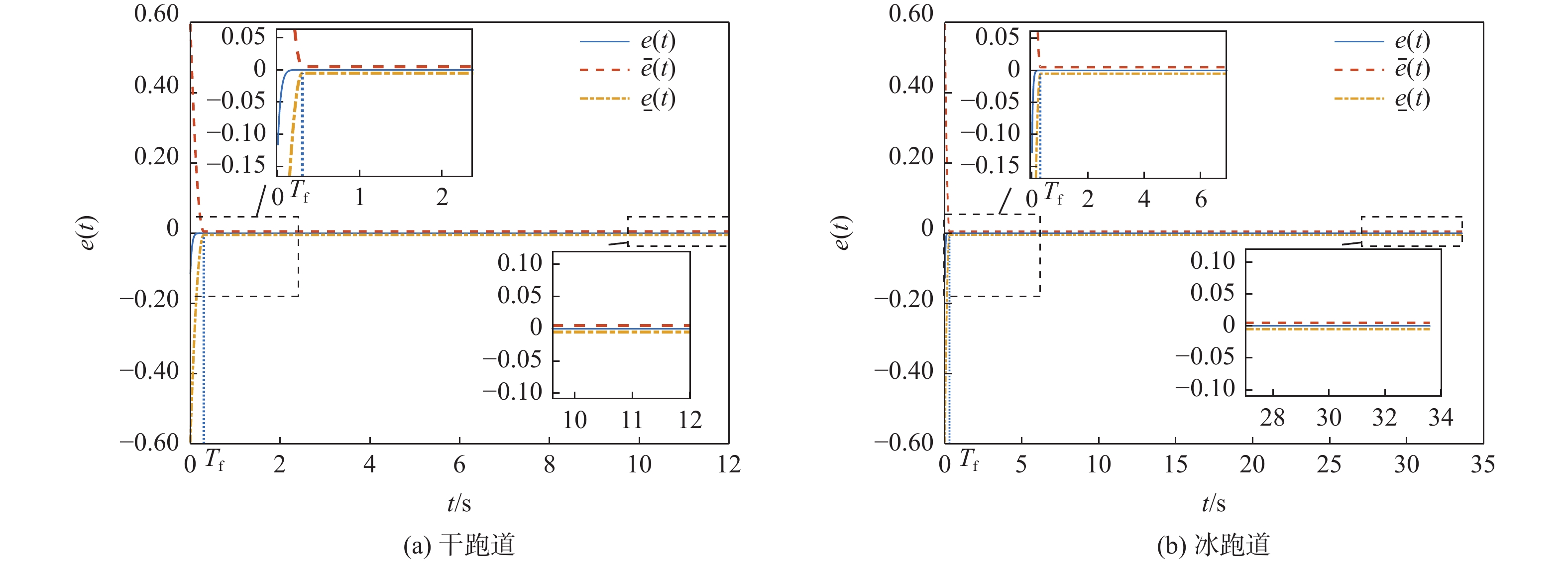
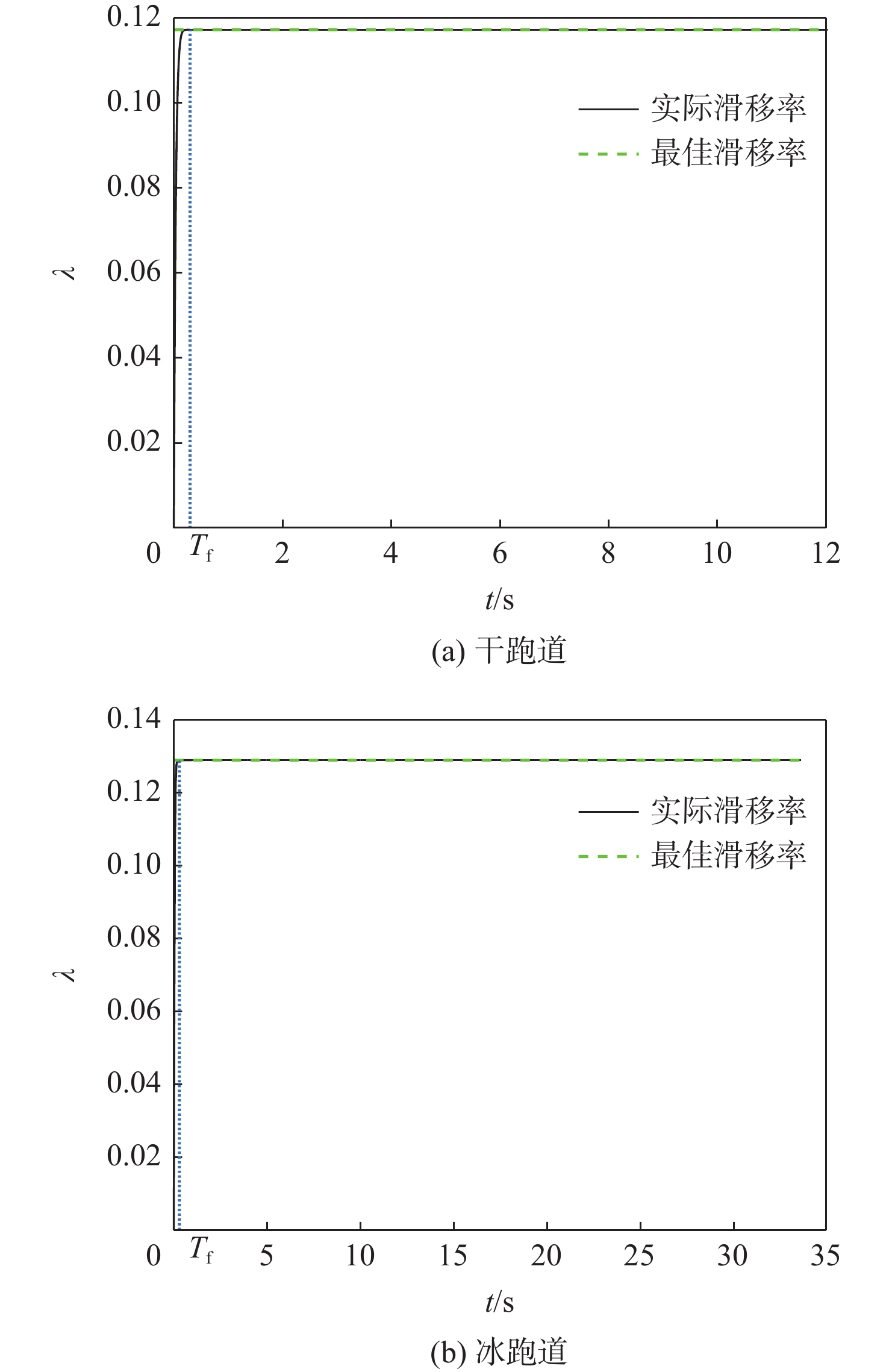
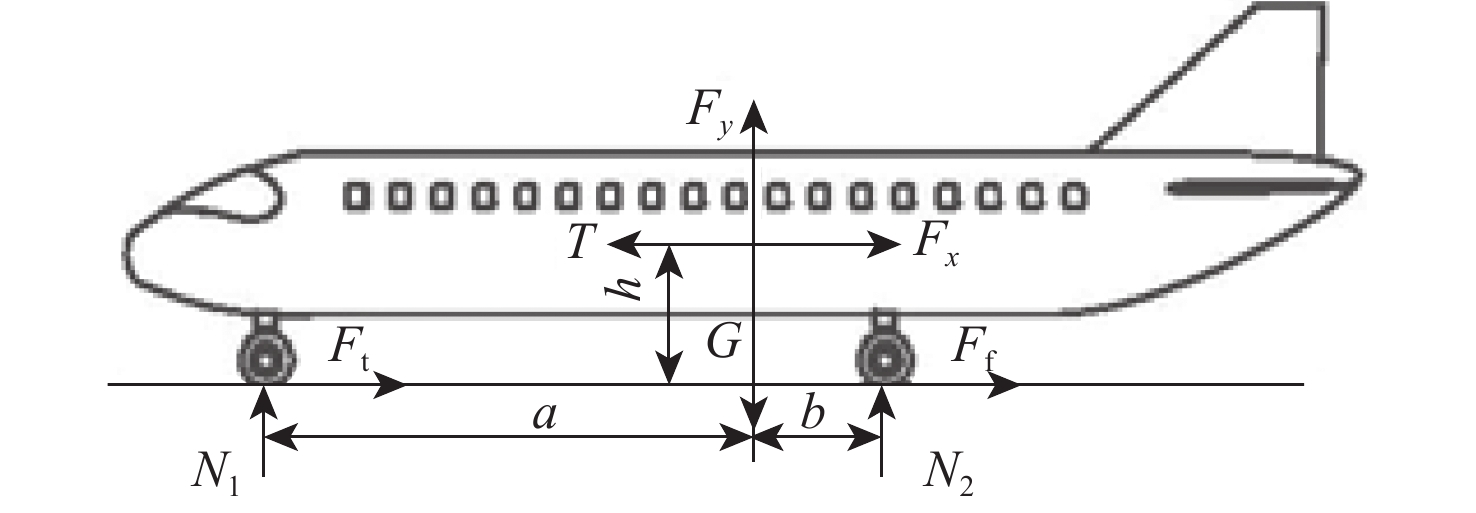
The aircraft’s electric antiskid braking system has strong nonlinear characteristics, and the interference in the electromechanical actuator (EMA) is not conducive to system stability, a sliding mode backstepping control method based on finite-time prescribed performance control is proposed. An electric antiskid braking system model with slip rate subsystem and EMA subsystem is established based on reasonable simplification with the finite time convergence prescribed performance function introduced. Based on the backstepping design, a finite-time prescribed performance control algorithm is designed to generate reference braking pressure for the slip rate controller, which can limit the slip tracking error in the predefined bounds within a finite time by appropriately choosing design parameters. Using a control algorithm for the nonsingular terminal sliding mode, the EMA controller is designed. To improve EMA subsystem robustness and precision, an extended state observer is designed, which can estimate and compensate the disturbances. Simulation results verity the control effects of the proposed method for dry and ice runways.

| [1] |
李繁飙, 黄培铭, 阳春华, 等. 基于非线性干扰观测器的飞机全电刹车系统滑模控制设计[J]. 自动化学报, 2021, 47(11): 2557-2569.
LI F B, HUANG P P, YANG C H, et al. Sliding mode control design of aircraft electric brake system based on nonlinear disturbance observer[J]. Acta Automatica Sinica, 2021, 47(11): 2557-2569(in Chinese).
|
| [2] |
付龙飞. 飞机防滑刹车系统的非线性控制技术应用研究 [D]. 西安: 西北工业大学, 2017.
FU L F. Research on application of nonlinear control technology in aircraft anti-skid braking system [D]. Xi’an: Northwestern Polytechnical University, 2017(in Chinese).
|
| [3] |
陈晓雷, 林辉, 李兵强, 等. 飞机全电刹车系统滑移率约束反演滑模控制[J]. 上海交通大学学报, 2015, 49(12): 1855-1861.
CHEN X L, LIN H, LI B Q, et al. Backstepping sliding mode control for aircraft electric braking systems with slip ratio constraint[J]. Journal of Shanghai Jiao Tong University, 2015, 49(12): 1855-1861(in Chinese).
|
| [4] |
付龙飞, 田广来, 王鹏, 等. 飞机防滑刹车系统滑移率自适应滑模控制研究[J]. 西北工业大学学报, 2015, 33(5): 770-774.
FU L F, TIAN G L, WANG P, et al. Adaptive sliding mode control strategy for the aircraft antiskid braking system based on slip ratio[J]. Journal of Northwestern Polytechnical University, 2015, 33(5): 770-774(in Chinese).
|
| [5] |
韩伟健. 飞机全电刹车机电作动系统的建模与控制方法研究 [D]. 西安: 西北工业大学, 2015.
HAN W J. Research on modeling and control method of electro-mechanical actuating system of aircraft electric brake [D]. Xi’an: Northwestern Polytechnical University, 2015(in Chinese).
|
| [6] |
杜成林. 飞机防滑刹车系统变结构控制研究 [D]. 沈阳: 东北大学, 2008.
DU C L. Research on variable structure control of aircraft anti-skid brake system [D]. Shenyang: Northeastern University, 2008(in Chinese).
|
| [7] |
田广来, 谢利理, 岳开宪, 等. 飞机防滑刹车系统的最佳滑移率式控制方法研究[J]. 航空学报, 2005, 26(4): 461-464.
TIAN G L, XIE L L, YUE K X, et al. Study on optimal control method of an aircraft anti-skid braking system based on slip-ratio[J]. Acta Aeronautica et Astronautica Sinica, 2005, 26(4): 461-464(in Chinese).
|
| [8] |
何恒, 吴瑞祥. 改进的 BP 神经网络在飞机防滑刹车系统的应用[J]. 北京航空航天大学学报, 2004, 30(6): 561-564.
HE H, WU R X. Improved BP neural network in design of aircraft antiskid braking system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(6): 561-564(in Chinese).
|
| [9] |
BECHLIOULIS C P, ROVITHAKIS G A. Robust adaptive control of feedback linearizable mimo nonlinear systems with prescribed performance[J]. IEEE Transactions on Automatic Control, 2008, 53(9): 2090-2099. doi: 10.1109/TAC.2008.929402
|
| [10] |
TAN J, DONG Y F, SHAO P Y, et al. Anti-saturation adaptive fault-tolerant control with fixed-time prescribed performance for UAV under AOA asymmetric constraint[J]. Aerospace Science and Technology, 2022, 120: 107264. doi: 10.1016/j.ast.2021.107264
|
| [11] |
ZHUANG M L, TAN L G, LI K H, et al. Fixed-time formation control for spacecraft with prescribed performance guarantee under input saturation[J]. Aerospace Science and Technology, 2021, 119: 107176. doi: 10.1016/j.ast.2021.107176
|
| [12] |
ZHOU T, LIU C, LIU X, et al. Finite-time prescribed performance adaptive fuzzy control for unknown nonlinear systems[J]. Fuzzy Sets and Systems, 2021, 402: 16-34. doi: 10.1016/j.fss.2020.03.010
|
| [13] |
ZHANG X, LIN H. Backstepping fuzzy sliding mode control for the antiskid braking system of unmanned aerial vehicles[J]. Electronics, 2020, 9(10): 1731. doi: 10.3390/electronics9101731
|
| [14] |
GAO Z Q. Scaling and bandwidth-parameterization based controller tuning [C]//Proceedings of the 2003 American Control Conference. Piscataway: IEEE Press, 2003: 4989-4996.
|
| [15] |
孙辉, 闫建国, 屈耀红. 输入输出受限的无人机防滑刹车系统容错控制[J]. 北京航空航天大学学报, 2017, 43(6): 1132-1140. doi: 10.13700/j.bh.1001-5965.2016.0438
SUN H, YAN J G, QU Y H. Fault-tolerant control of UAV anti-skid braking system with input and output constraints[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6): 1132-1140(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0438
|
| [16] |
陈晓雷, 林辉, 马冬麒. 无人机全电式自主刹车系统滑模极值搜索控制[J]. 控制理论与应用, 2015, 32(11): 1439-1448.
CHEN X L, LIN H, MA D L. Sliding-mode extremum-seeking control for all-electric active braking system in unmanned aerial vehicle[J]. Control Theory & Applications, 2015, 32(11): 1439-1448(in Chinese).
|
| [17] |
LIANG B, ZHU Y Q, LI Y R, et al. Adaptive nonsingular fast terminal sliding mode control for braking systems with electro-mechanical actuators based on radial basis function[J]. Energies, 2017, 10(10): 1637. doi: 10.3390/en10101637
|
| [18] |
冯勇, 鲍晟, 余星火. 非奇异终端滑模控制系统的设计方法[J]. 控制与决策, 2002, 17(2): 194-198. doi: 10.3321/j.issn:1001-0920.2002.02.017
FENG Y, BAO S, YU X H. Design method of non-singular terminal sliding mode control systems[J]. Control and Decision, 2002, 17(2): 194-198(in Chinese). doi: 10.3321/j.issn:1001-0920.2002.02.017
|
Figures(9) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: