| Citation: | OUYANG X F,ZENG F L,LYU D,et al. Positioning accuracy and localization algorithm with relative measurement errors in blast-off platforms[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):187-197 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0240

|
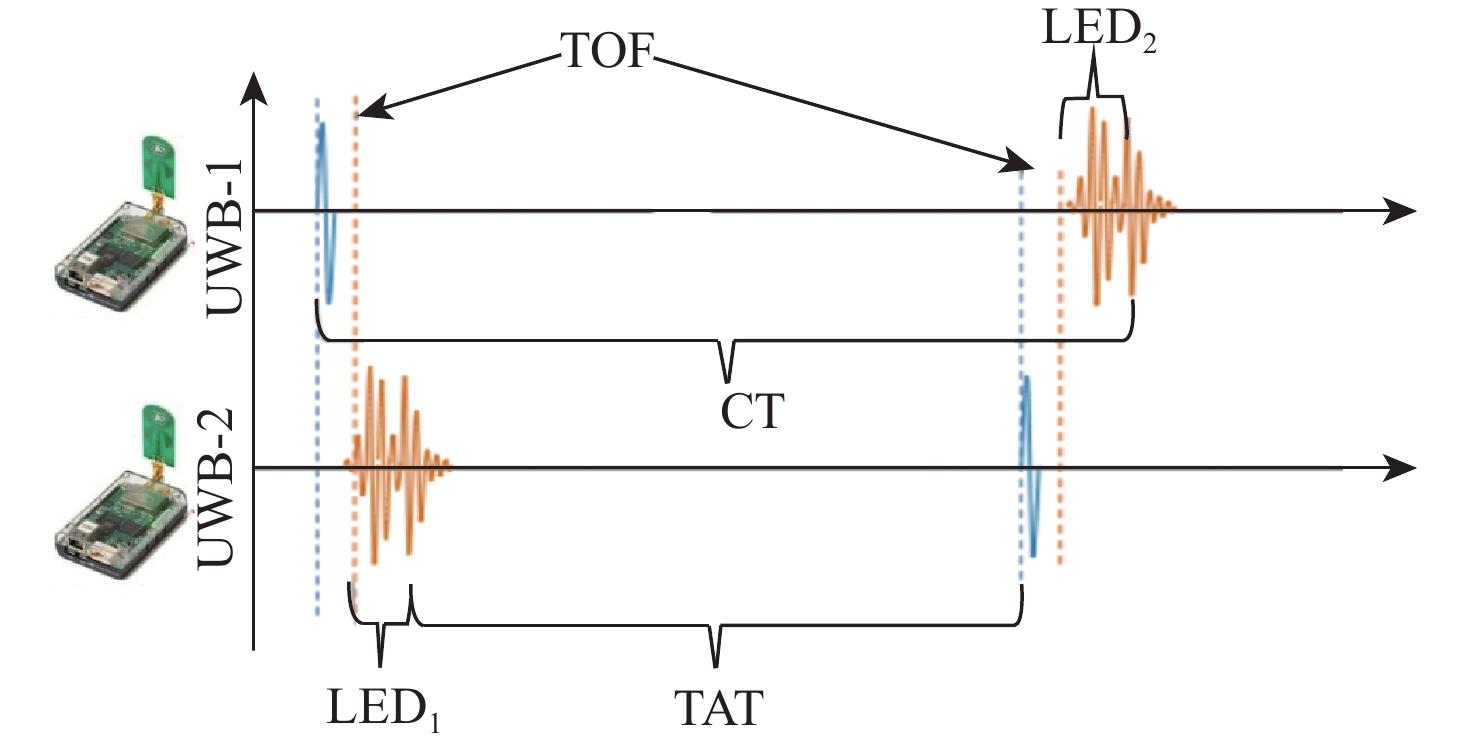
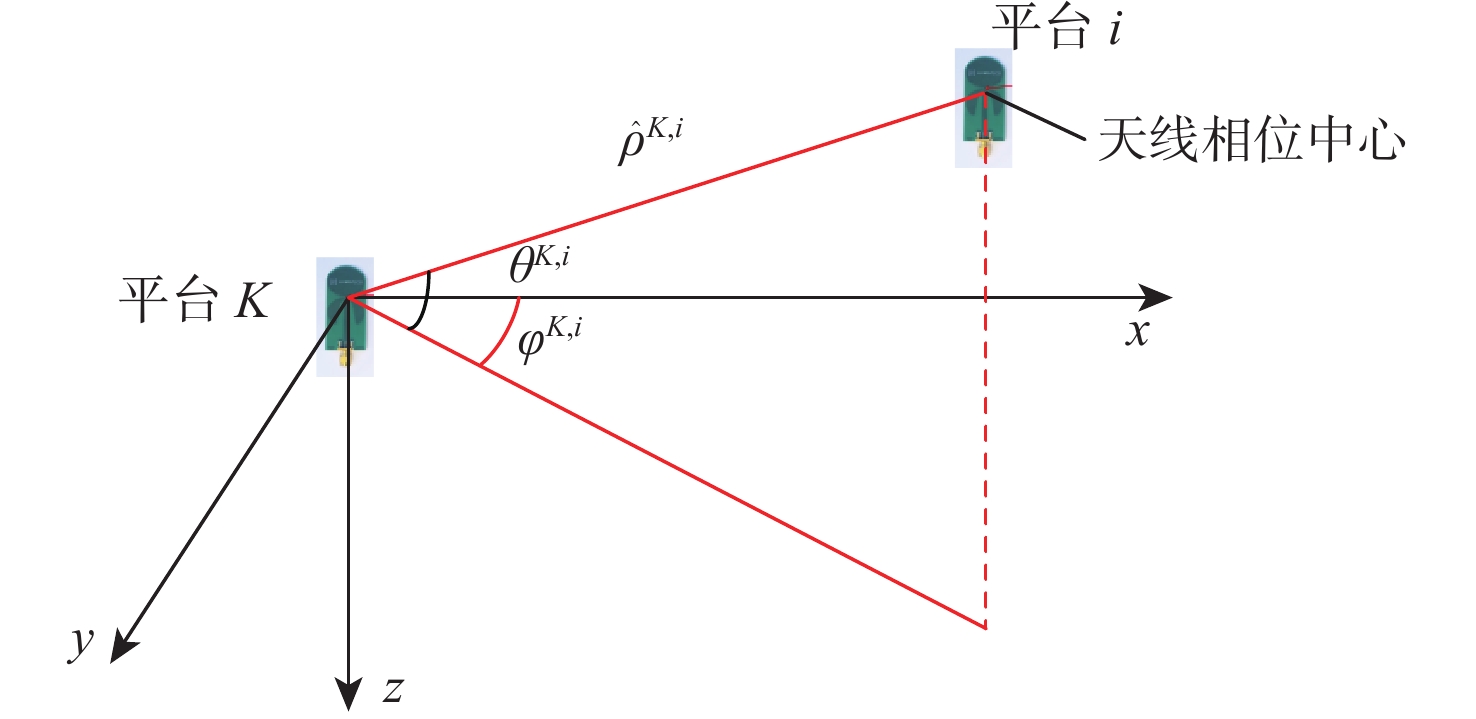
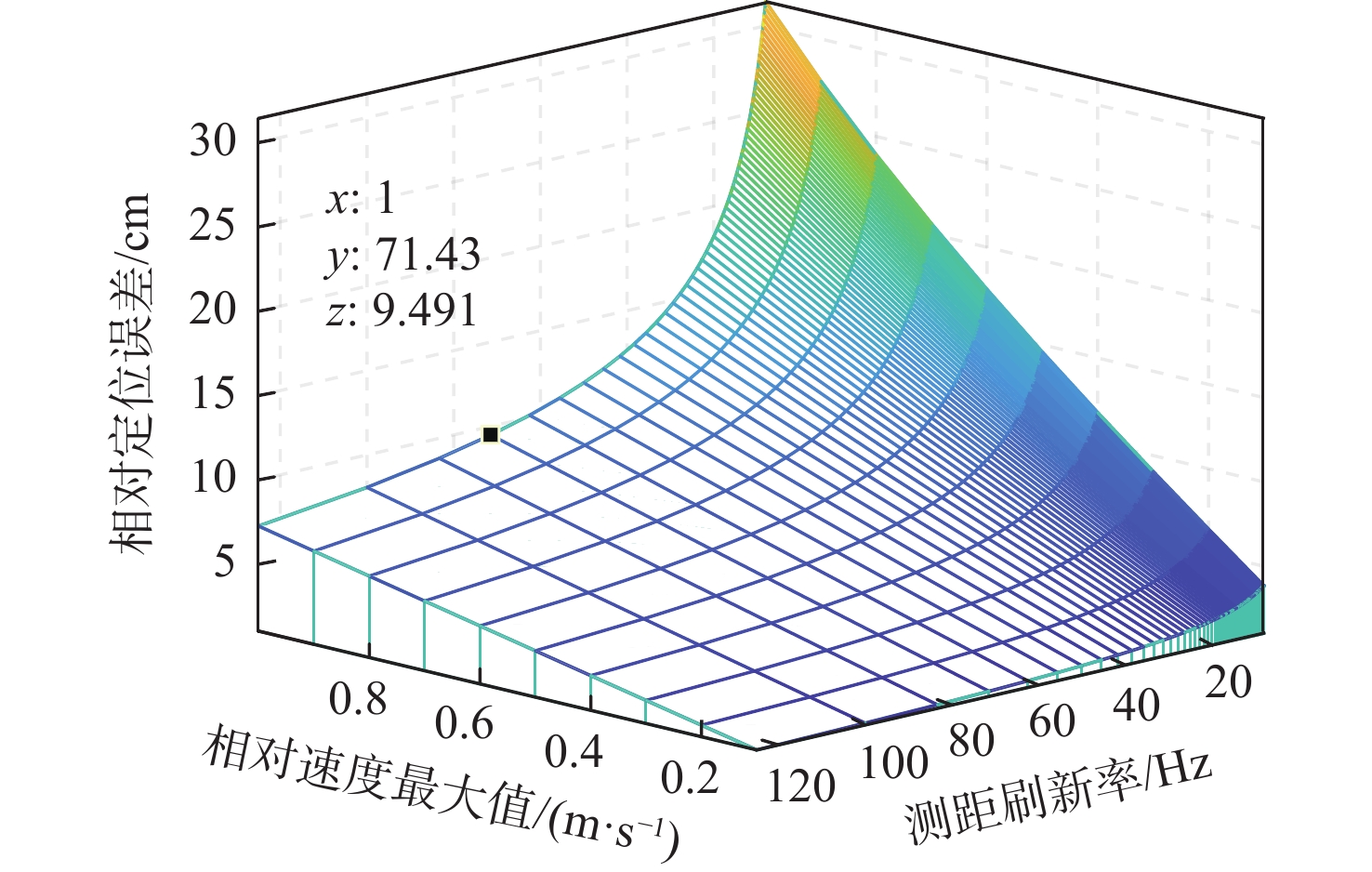
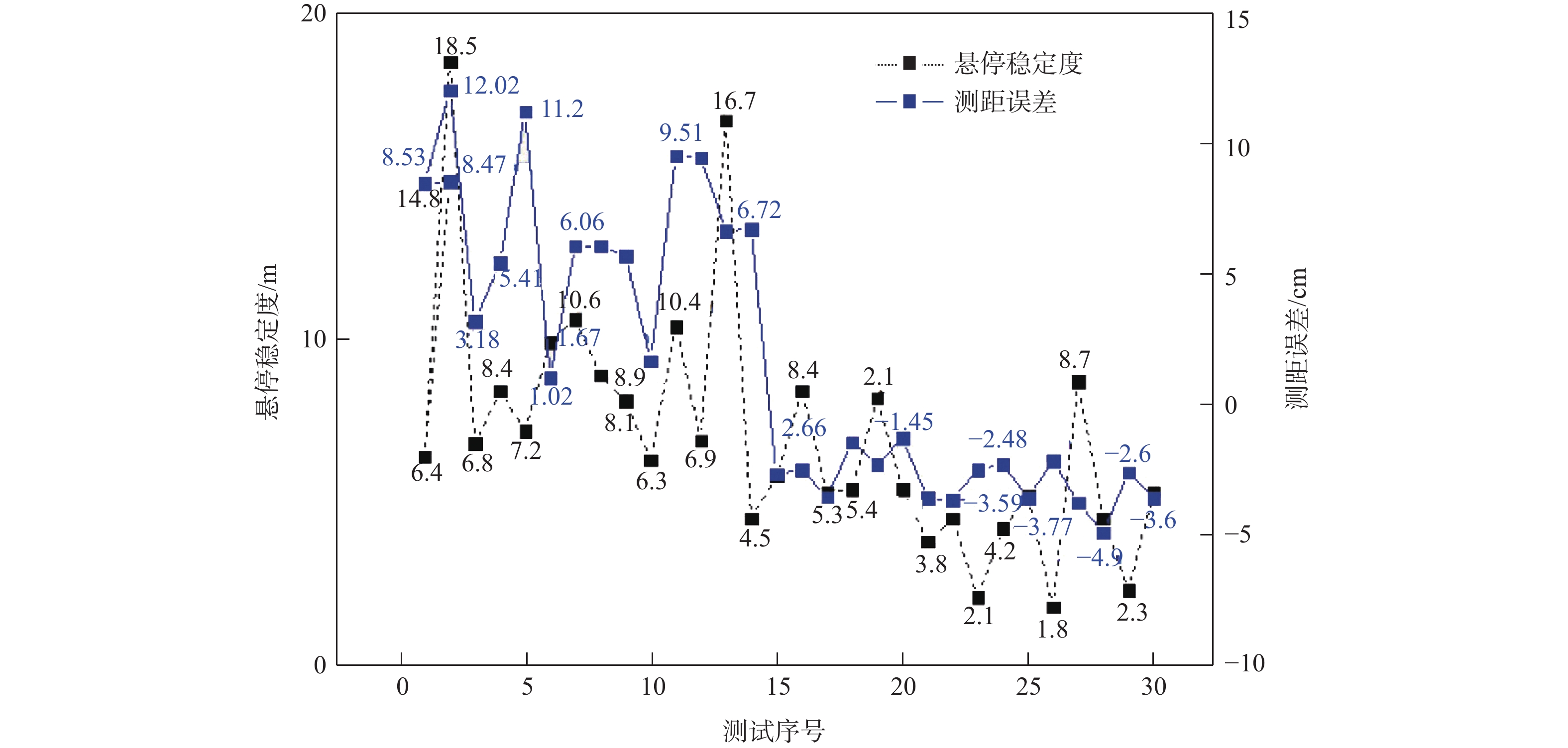
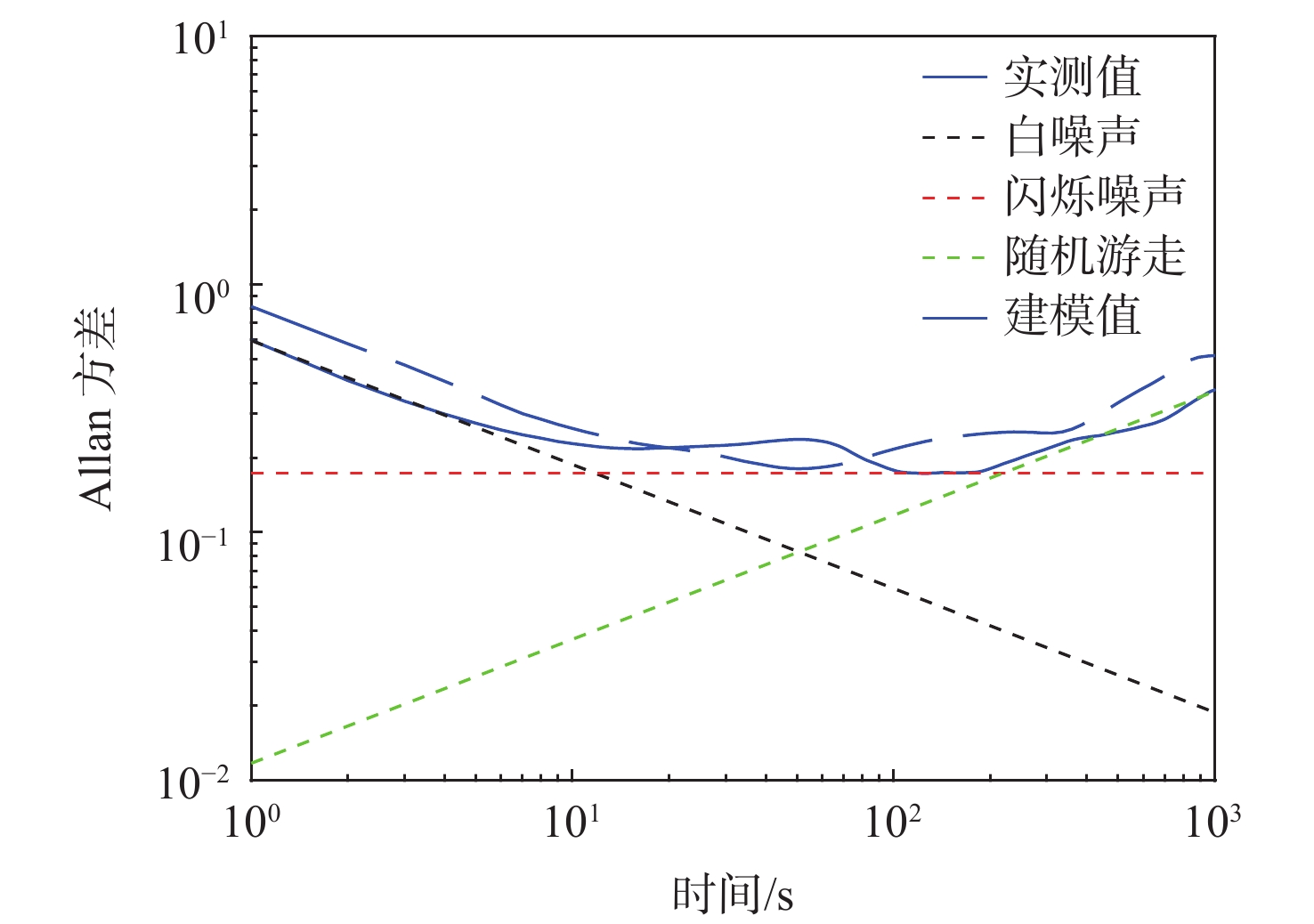
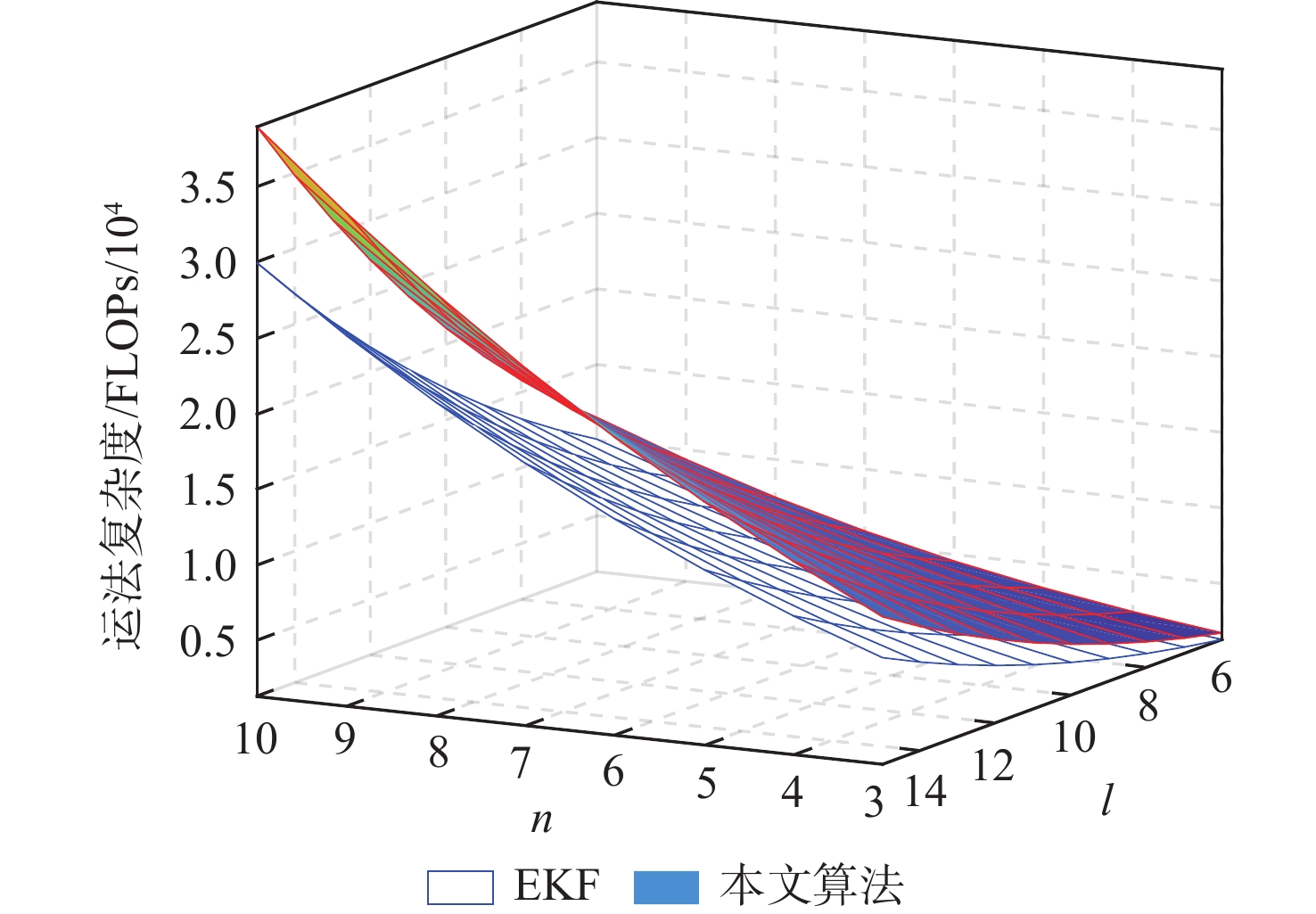
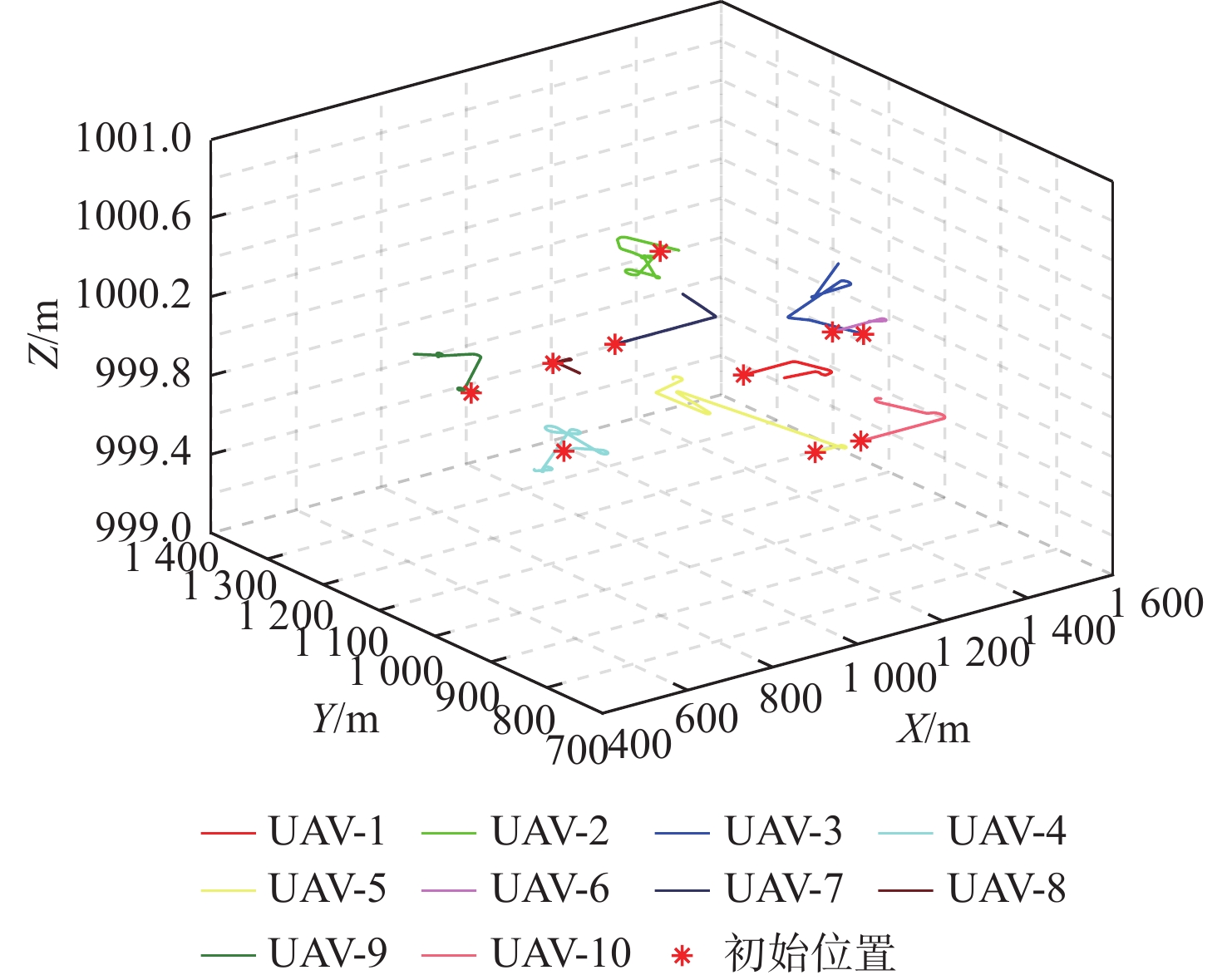
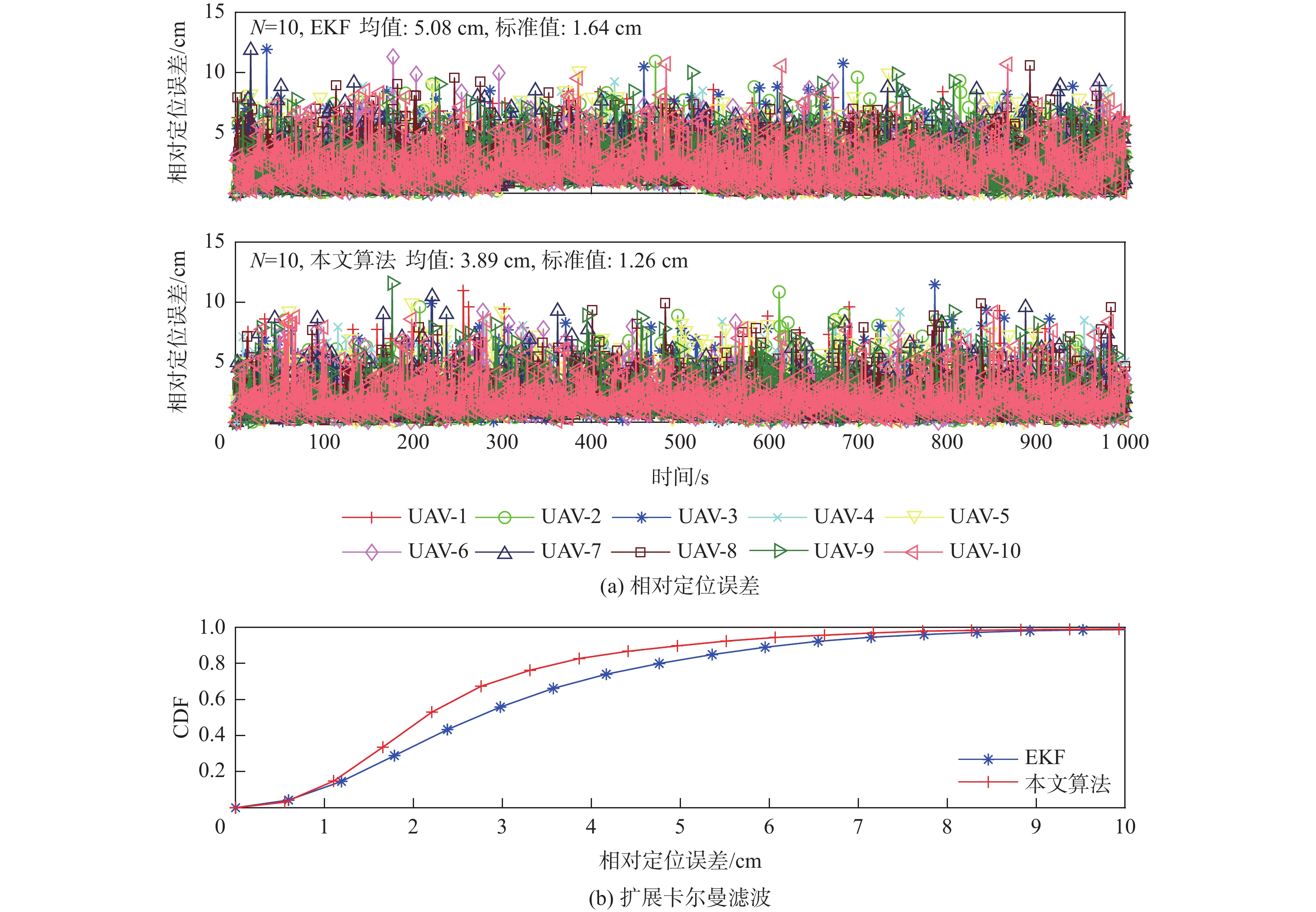
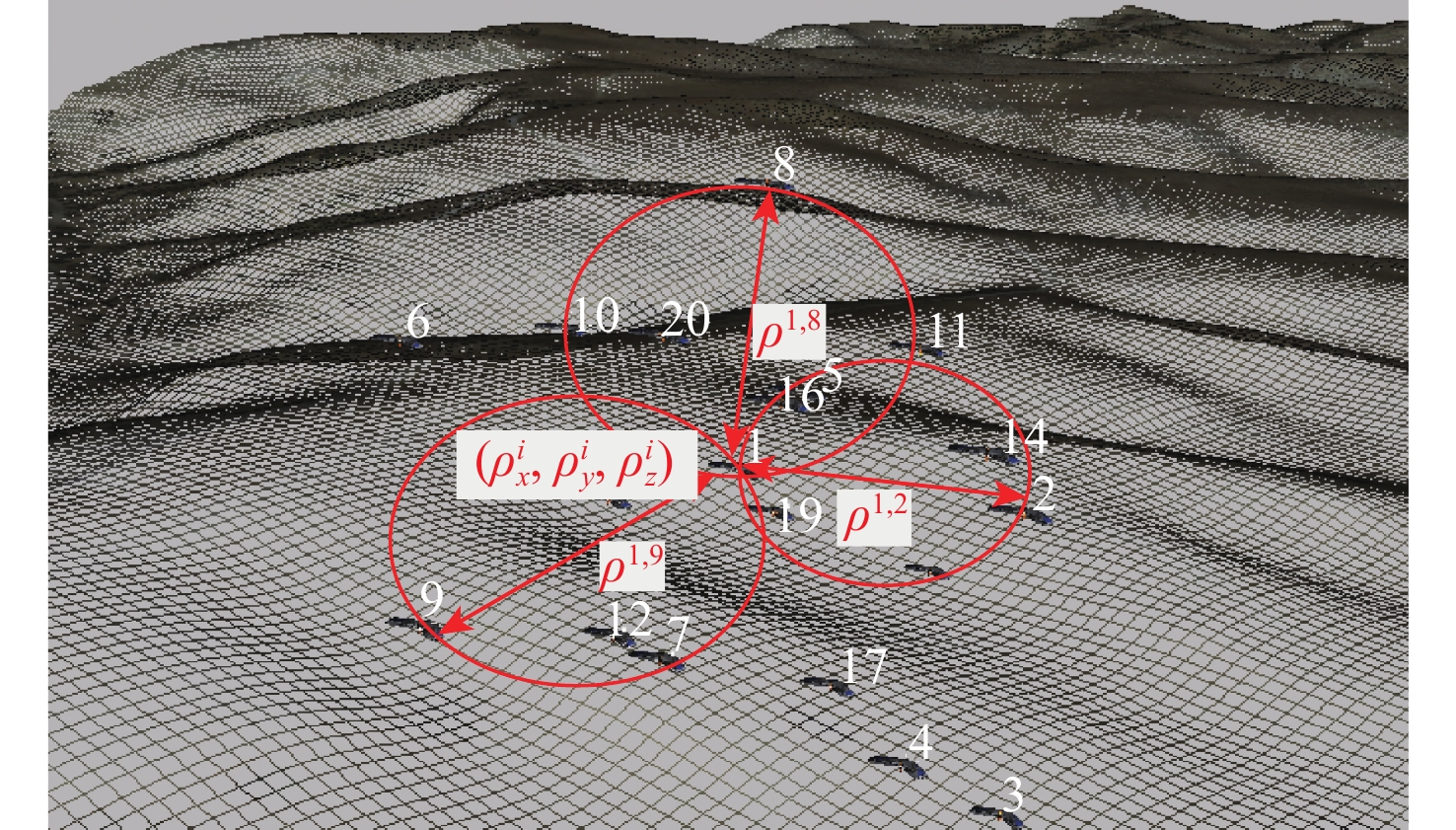
In response to the high-precision relative positioning requirements for precise collaborative operations involving distributed blast-off platforms, this research proposes a relative ranging and positioning model based on ultra wide band (UWB) sensors. It analyzes the error factors and noise components of UWB modules under non-ideal conditions with antenna phase center errors, ranging refresh rates, and hover stability. To improve the overall performance of ranging and positioning, the noise component in UWB measurements is identified and analyzed by Allan variance, and the colored noise model along with estimated parameters are integrated into the measurement update of the positioning algorithm. The relative positioning of distributed blast-off platforms is then obtained through improving the expanded Kalman filter. Simulation experiments show that when the UWB measurement noise follows a non-Gaussian distribution, the position estimation accuracy of the proposed algorithm is 23.43% higher than that of the traditional EKF algorithm. Compared to traditional algorithms, the proposed algorithm reduces the influence of measurement color noise, thereby increasing relative positioning accuracy in satellite navigation-denied environments.

| [1] |
FOX N. Precision electronic warfare (PREW): BAA 09-65 [R]: Arlington Strategic Technology Office of the US Dedense Advanced Research Projects Agency, 2009: 5-32.
|
| [2] |
李磊, 王彤, 蒋琪. 美国CODE项目推进分布式协同作战发展[J]. 无人系统技术, 2018, 1(3): 59-66.
LI L, WANG T, JIANG Q. DARPA CODE program promotes the development of distributed collaborative operations[J]. Unmanned Systems Technology, 2018, 1(3): 59-66 (in Chinese).
|
| [3] |
臧会凯, 雷欢, 但晓东, 等. 分布式雷达相参发射原理与性能分析[J]. 电子与信息学报, 2015, 37(8): 1801-1807.
ZANG H K, LEI H, DAN X D, et al. Theory and performance analysis of coherent transmission for distributed radars[J]. Journal of Electronics & Information Technology, 2015, 37(8): 1801-1807(in Chinese).
|
| [4] |
GOEL S, KEALY A, GIKAS V, et al. Cooperative localization of unmanned aerial vehicles using GNSS, MEMS inertial, and UWB sensors[J]. Journal of Surveying Engineering, 2017, 143(4): 04017007. doi: 10.1061/(ASCE)SU.1943-5428.0000230
|
| [5] |
王均晖, 孙蕊, 程琦, 等. 无人机组合导航直接法与间接法滤波方式比较[J]. 北京航空航天大学学报, 2020, 46(11): 2156-2167. doi: 10.13700/j.bh.1001-5965.2019.0578
WANG J H, SUN R, CHENG Q, et al. Comparison of direct and indirect filtering modes for UAV integrated navigation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(11): 2156-2167(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0578
|
| [6] |
LIU C, PRIOR S D , TEACY W L, et al. Computationally efficient visual-inertial sensor fusion for global positioning system-denied navigation on a small quadrotor[J]. Advances in Mechanical Engineering, 2016, 8(3): 1687-1698.
|
| [7] |
KOPPANYI Z, TOTH C K. INDOOR Ultra-wide band nerwork adjustment using maximum likelihood estimation[J]. ISPRS Annals of Photogrammetry, Remote Sensing & Spatial Information Sciences, 2014, 2(1): 31-35.
|
| [8] |
JOHNSON J, DEWBERRY B. Ultra-wideband aiding of GPS for quick deployment of anchors in a GPS-denied ad-hoc sensor tracking and communication system[C]//Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011). Washington: The Institute of Navigation, 2011: 3959-3966.
|
| [9] |
DIERENBACH K, OSTROWSKI S, JOZKOW G, et al. UWB for navigation in GNSS compromised environments[C]//Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015). Washington: The Institute of Navigation, 2015: 2380-2389.
|
| [10] |
熊骏, 熊智, 于永军, 等. UWB辅助的无人机近距离编队相对导航方法[C]// 中国惯性技术学会高端前沿专题学术会议论文集. 2017: 254-263.
XIONG J, XIONG Z, YU Y J, et al. Relative navigation algorithm for UAV close-formation flight aided by UWB[C]// Proceedings of the High-end Frontier Academic Conference of China Inertial Technology Society. 2017: 254-263 (in Chinese).
|
| [11] |
QUERALTA J P, AlMANSA C M, SCHIANO F, et al. Uwb-based system for UAV localization in gnss-denied environments: Characterization and dataset[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2020: 4521-4528.
|
| [12] |
SHULE W, ALMANSA C M, QUERALTA J P, et al. Uwb-based localization for multi-uav systems and collaborative heterogeneous multi-robot systems[J]. Procedia Computer Science, 2020, 175: 357-364.
|
| [13] |
GROBWINDHAGER B, BOANO C A, RATH M, et al. Enabling runtime adaptation of physical layer settings for dependable UWB communications[C]//2018 IEEE 19th International Symposium on" A World of Wireless, Mobile and Multimedia Networks". Piscataway, IEEE Press, 2018: 1-11.
|
| [14] |
DING W D, WANG J L, RIZOS C, et al. Improving adaptive Kalman estimation in GPS/INS integration[J]. Journal of Navigation, 2007, 60(3): 517-529. doi: 10.1017/S0373463307004316
|
| [15] |
LIU R, LIU F, LIU C, et al. Modified Sage-Husa adaptive Kalman filter-based SINS/DVL integrated navigation system for AUV[J]. Journal of Sensors, 2021, 2021: 9992041.
|
| [16] |
BOARD I S. IEEE standard definitions of physical quantities for fundamental frequency and time metrology-random instabilities: 1139-2008[S]. Piscataway: IEEE Press, 2008: 5-36.
|
| [17] |
VIG J R, FERRE-PIKAL E S, CAMPARO J C, et al. IEEE standard definitions of physical quantities for fundamental frequency and time metrology-random instabilities[S]. Piscataway: IEEE, 1999: 1139-1999.
|
| [18] |
HUANG Y, HUA L, WANG Q, et al. Visible light positioning and navigation using noise measurement and mitigation[J]. IEEE Transactions on Vehicular Technology, 2019, 68(11): 11094-11106. doi: 10.1109/TVT.2019.2943517
|
| [19] |
CHANG G. On Kalman filter for linear system with colored measurement noise[J]. Journal of Geodesy, 2014, 88(12): 1163-1170. doi: 10.1007/s00190-014-0751-7
|
| [20] |
DEMARCO K , SQUIRES E , DAY M , et al. Simulating collaborative robots in a massive multi-agent game environment (SCRIMMAGE)[C]//Springer Proceedings in Advanced Robotics. Switzerland, AJ: Springer Nature, 2019: 283-291.
|
| [21] |
PALA S , JAYAN S , KURUP D G. An accurate UWB based localization system using modified leading edge detection algorithm[J]. Ad Hoc Networks, 2020, 97: 102017
|
| [22] |
李荣冰, 王念曾, 刘建业, 等. 面向相对导航的UWB测距误差估计与补偿方法[J]. 仪器仪表学报, 2019, 40(5): 28-35.
LI R B, WANG N C, LIU J Y, et al. UWB ranging error estimation and compensation method for relative navigation[J]. Chinese Journal of Scientific Instrument, 2019, 40(5): 28-35 (in Chinese).
|
| [23] |
MIHAI I V, TAMAS R, SHARAIHA A. An UWB physical optics approach for Fresnel-zone RCS measurements on a complex target at non-normal incidence[J]. Sensors, 2019, 19(24): 5454-5470. doi: 10.3390/s19245454
|
| [24] |
GUO K, QIU Z, MIAO C, et al. Ultra-wideband-based localization for quadcopter navigation[J]. Unmanned Systems, 2016, 4(1): 23-34. doi: 10.1142/S2301385016400033
|
| [25] |
ZHOU J M. A design of micro-strip antenna in the RFID system and UWB system[J]. Recent Advances in Electrical & Electronic Engineering, 2016, 9(2): 119-123.
|
| [26] |
崔正阳, 王勇. 无人机固定时间路径跟踪容错制导控制[J]. 北京航空航天大学学报, 2021, 47(8): 1619-1627
CUI Z Y, WANG Y. Fault-tolerant fixed-time path following guidance control of UAV[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1619-1627(in Chinese).
|
| [27] |
匡银虎, 张虹波. 多旋翼无人飞行器悬停姿态精确控制仿真研究[J]. 计算机仿真, 2018, 35(3): 34-37. doi: 10.3969/j.issn.1006-9348.2018.03.008
KUANG Y H, ZHANG H B. Simulation study on accurate control of hovering attitude of multi-rotor unmanned aerial vehicle[J]. Compute Simulation, 2018, 35(3): 34-37 (in Chinese). doi: 10.3969/j.issn.1006-9348.2018.03.008
|
| [28] |
张奇. 一种飞行器悬停功能稳定性测试方法和系统: CN106742051A[P]. 2017-05-31.
ZHANG Q. Aircraft hovering function stability testing method and system: CN106742051A[P]. 2017-05-31(in Chinese).
|
| [29] |
MCGUIRE K, DE CROON G, DE WAGTER C, et al. Efficient optical flow and stereo vision for velocity estimation and obstacle avoidance on an autonomous pocket drone[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 1070-1076. doi: 10.1109/LRA.2017.2658940
|
| [30] |
耿梦梦, 任元, 樊亚洪, 等. MSCSG随机误差测试及误差源分析[J]. 北京航空航天大学学报, 2021, 47(8): 1697-1704. doi: 10.13700/j.bh.1001-5965.2020.0269
GENG M M, REN Y, FAN Y H, et al. Random error test and error source analysis of MSCSG[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1697-1704(in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0269
|
| [31] |
BROWN R G, HWANG P Y C. Introduction to random signals and applied Kalman filtering with Matlab exercises and solutions[M]. Hoboken: John Wiley & Sons, Inc., 1996: 87-125.
|
| [32] |
HUNGER R. Floating point operations in matrix-vector calculus[M]. Munich: Munich University of Technology, Inst. for Circuit Theory and Signal Processing, 2005.
|
| [33] |
张召友. 非线性Bayesian滤波及其在SINS/GPS紧耦合导航中的应用研究[D]. 哈尔滨: 哈尔滨工程大学, 2014.
ZHANG S Y. Research on nonlinear Bayesian filtering and its application for SINS/GPS tightly coupled navigation[D]. Harbin :Harbin Engineering University, 2014(in Chinese).
|
Figures(11) / Tables(2)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: