| Citation: | ZHANG Y,YU H,YANG X X,et al. Adaptive group formation tracking-containment control for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):97-109 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0264

|
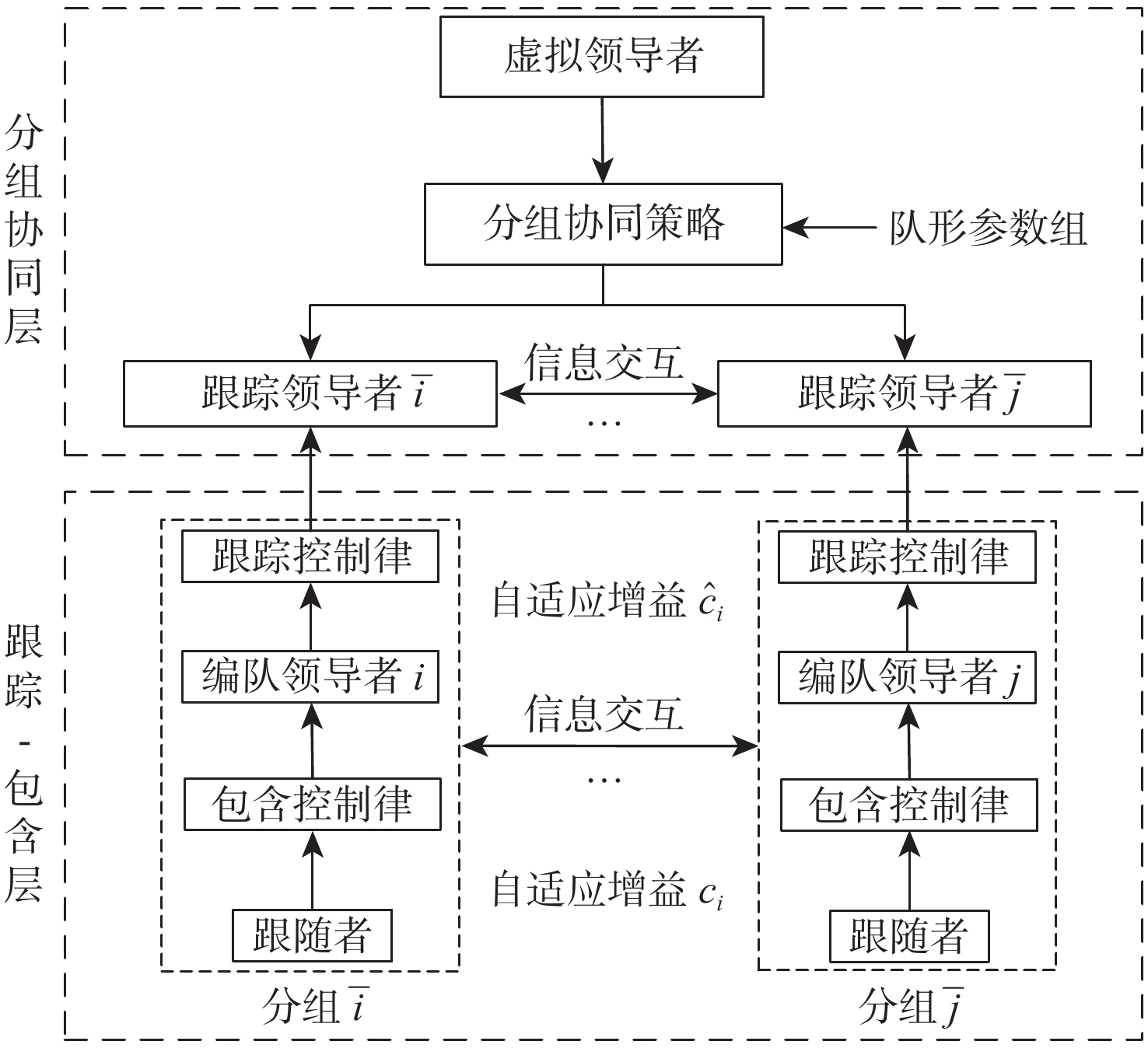
To address the group formation tracking-containment control problem of unmanned aerial vehicles (UAV) swarm, a hierarchical cooperative control architecture including group cooperation and tracking-containment is established. In order to highlight the top-level planning ability of swarm system, a group cooperative control strategy based on formation parameter group is proposed, which overcomes the defect that the existing multi formation control methods are difficult to realize formation transformation. On the basis of considering the communication coupling between groups, an adaptive group formation tracking-containment control law is designed to overcome the dependence of the control input on the eigenvalues of the Laplacian matrix, and the feasibility constraint of the expected formation is given. The saturation constraint is introduced into the control input, and the necessary and sufficient conditions for the stability of the system under the input saturation constraint are further derived to avoid the large-scale maneuver of the swarm. The results show that the proposed strategy can realize the group formation tracking-containment control of UAV swarm.

| [1] |
马雨微. 无人机集群作战系统的群智能任务分配方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2021.
MA Y W. Research on swarm intelligence task allocation method for UAV swarms combat system[D]. Harbin: Harbin Engineering University, 2021 (in Chinese).
|
| [2] |
乔琛. 面向无人机集群的协同编队控制算法与仿真实现[D]. 成都: 电子科技大学, 2021.
QIAO C. Collaborative formation control algorithm and simulation for UAV swarm[D]. Chengdu: University of Electronic Science and Technology of China, 2021 (in Chinese).
|
| [3] |
吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2021, 47(4): 814-827. doi: 10.13700/j.bh.1001-5965.2020.0026
WU A, YANG R N, LIANG X L, et al. Cooperative search algorithm based on pheromone decision for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(4): 814-827 (in Chinese). doi: 10.13700/j.bh.1001-5965.2020.0026
|
| [4] |
ALI Z A, HAN Z G. Multi-unmanned aerial vehicle swarm formation control using hybrid strategy[J]. Transactions of the Institute of Measurement and Control, 2021, 43(12): 2689-2701. doi: 10.1177/01423312211003807
|
| [5] |
SASKA M, HERT D, BACA T, et al. Formation control of unmanned micro aerial vehicles for straitened environments[J]. Autonomous Robots, 2020, 44(6): 991-1008. doi: 10.1007/s10514-020-09913-0
|
| [6] |
杨明月, 寿莹鑫, 唐勇, 等. 多四旋翼无人机编队保持与避碰控制[J]. 航空学报, 2022, 43(S1): 89-99. doi: 10.7527/S1000-6893.2022.26913
YANG M Y, SHOU Y X, TANG Y, et al. Multi-Quadrotor UAVs formation maintaining and collision avoidance control[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): 89-99(in Chinese). doi: 10.7527/S1000-6893.2022.26913
|
| [7] |
韩涛. 多智能体系统的编队与包含控制问题研究[D]. 武汉: 华中科技大学, 2017.
HAN T. Research on formation and containment control problems of multi-agent systems[D]. Wuhan: Huazhong University of Science and Technology, 2017 (in Chinese).
|
| [8] |
赵学远, 周绍磊, 王帅磊, 等. 切换拓扑条件下的多无人机系统编队包含控制[J]. 计算机科学, 2020, 47(S1): 577-582.
ZHAO X Y, ZHOU S L, WANG S L, et al. Formation containment control of multi-UAV system under switching topology[J]. Computer Science, 2020, 47(S1): 577-582 (in Chinese).
|
| [9] |
肖支才, 赵学远, 周绍磊, 等. 联合连通拓扑条件下多无人机系统编队包含控制[J]. 电光与控制, 2020, 27(3): 27-32.
XIAO Z C, ZHAO X Y, ZHOU S L, et al. Formation containment control of multi-UAV system under joint connected topology[J]. Electronics Optics & Control, 2020, 27(3): 27-32 (in Chinese).
|
| [10] |
HAN L, DONG X W, LI Q D, et al. Formation-containment control for second-order multi-agent systems with time-varying delays[J]. Neurocomputing, 2016, 218: 439-447. doi: 10.1016/j.neucom.2016.09.001
|
| [11] |
魏志强, 翁哲鸣, 化永朝, 等. 切换拓扑下异构无人集群编队-合围跟踪控制[J]. 航空学报, 2023, 44(2): 258-273.
WEI Z Q, WENG Z M, HUA Y Z, et al. Formation-containment tracking control for heterogeneous unmanned swarm systems with switching topologies[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(2): 258-273(in Chinese).
|
| [12] |
HUA Y Z, DONG X W, HAN L, et al. Formation-containment tracking for general linear multi-agent systems with a tracking-leader of unknown control input[J]. Systems & Control Letters, 2018, 122: 67-76.
|
| [13] |
李蒙. 基于固定时间收敛的多智能体系统编队包含控制研究[D]. 武汉: 湖北工业大学, 2021.
LI M. Research on formation-containment control of multi-agent systems based on fixed-time convergence[D]. Wuhan: Hubei University of Technology, 2021 (in Chinese).
|
| [14] |
田磊, 赵启伦, 董希旺, 等. 异构多智能体系统分组输出时变编队跟踪控制[J]. 航空学报, 2020, 41(7): 323727.
TIAN L, ZHAO Q L, DONG X W, et al. Time-varying output group formation tracking for heterogeneous multi-agent systems[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(7): 323727 (in Chinese).
|
| [15] |
LU Y Z, DONG X W, LI Q D, et al. Time-varying group formation-containment tracking control for general linear multiagent systems with unknown inputs[J]. IEEE Transactions on Cybernetics, 2022, 52(10): 11055-11067. doi: 10.1109/TCYB.2021.3058086
|
| [16] |
HU J Y, BHOWMICK P, LANZON A. Distributed adaptive time-varying group formation tracking for multiagent systems with multiple leaders on directed graphs[J]. IEEE Transactions on Control of Network Systems, 2019, 7(1): 140-150.
|
| [17] |
HAN L, XIE Y X, LI X D, et al. Time-varying group formation tracking control for second-order multi-agent systems with communication delays and multiple leaders[J]. Journal of the Franklin Institute, 2020, 357(14): 9761-9780. doi: 10.1016/j.jfranklin.2020.07.048
|
| [18] |
MENG Z Y, LIN Z L, REN W. Robust cooperative tracking for multiple non-identical second-order nonlinear systems[J]. Automatica, 2013, 49(8): 2363-2372. doi: 10.1016/j.automatica.2013.04.040
|
| [19] |
REN W, CAO Y C. Distributed coordination of multi-agent networks: Emergent problems, models, and issues[M]. London: Springer London, 2011.
|
| [20] |
ZAHREDDINE Z. An extension of the routh array for the asymptotic stability of a system of differential equations with complex coefficients[J]. Applicable Analysis, 1993, 49: 61-72. doi: 10.1080/00036819308840165
|
| [21] |
CURTIN T, BELLINGHAM J, CATIPOVIC J, et al. Autonomous oceanographic sampling networks[J]. Oceanography, 1993, 6(3): 86-94. doi: 10.5670/oceanog.1993.03
|
| [22] |
HU J Y, BHOWMICK P, LANZON A. Two-layer distributed formation-containment control strategy for linear swarm systems: Algorithm and experiments[J]. International Journal of Robust and Nonlinear Control, 2020, 30: 6433-6453. doi: 10.1002/rnc.5105
|
| [23] |
LIN Z L. Low gain feedback[M]. London: Springer London, 1999.
|

Figures(14)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.





 DownLoad:
DownLoad: