| Citation: | ZHANG Y L,MA Z Z,SHI L,et al. Multi-agent coverage control based on communication connectivity maintenance constraints[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):519-528 (in Chinese) doi: 10.13700/j.bh.1001-5965.2022.0340

|
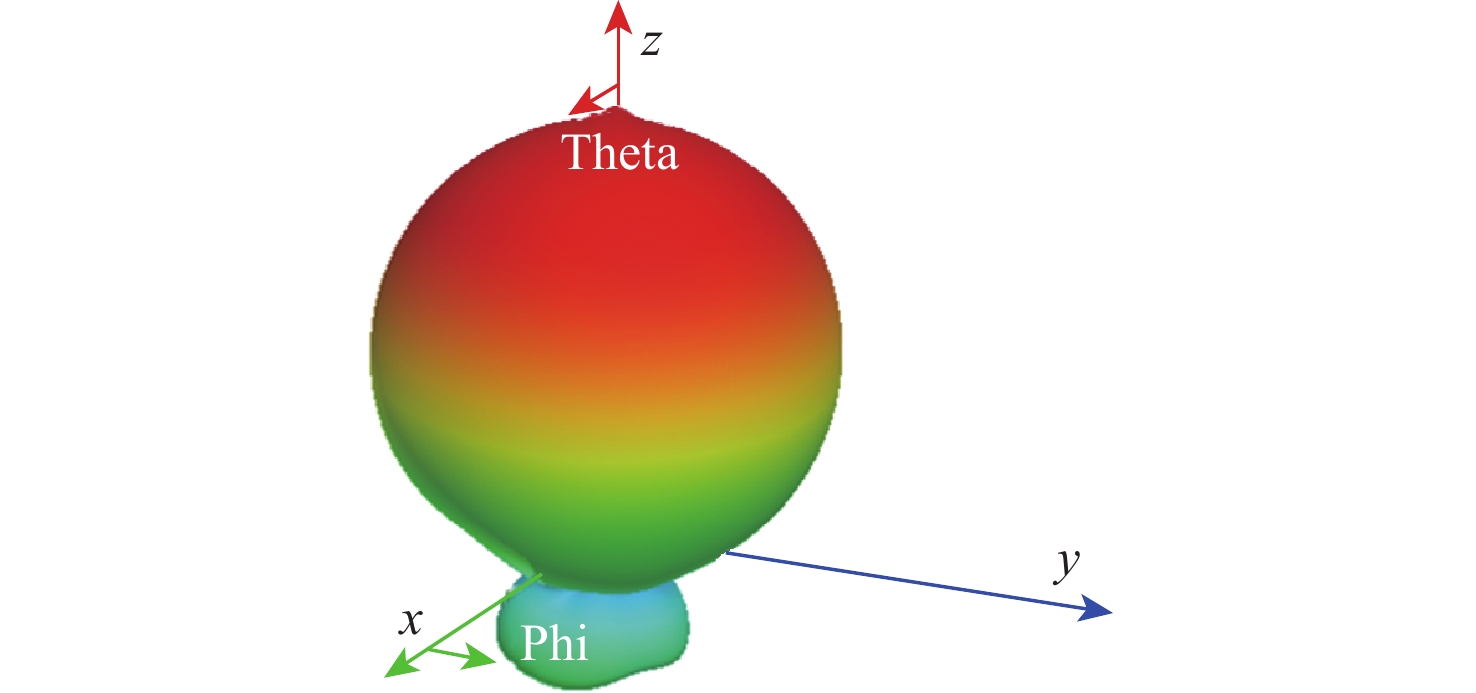
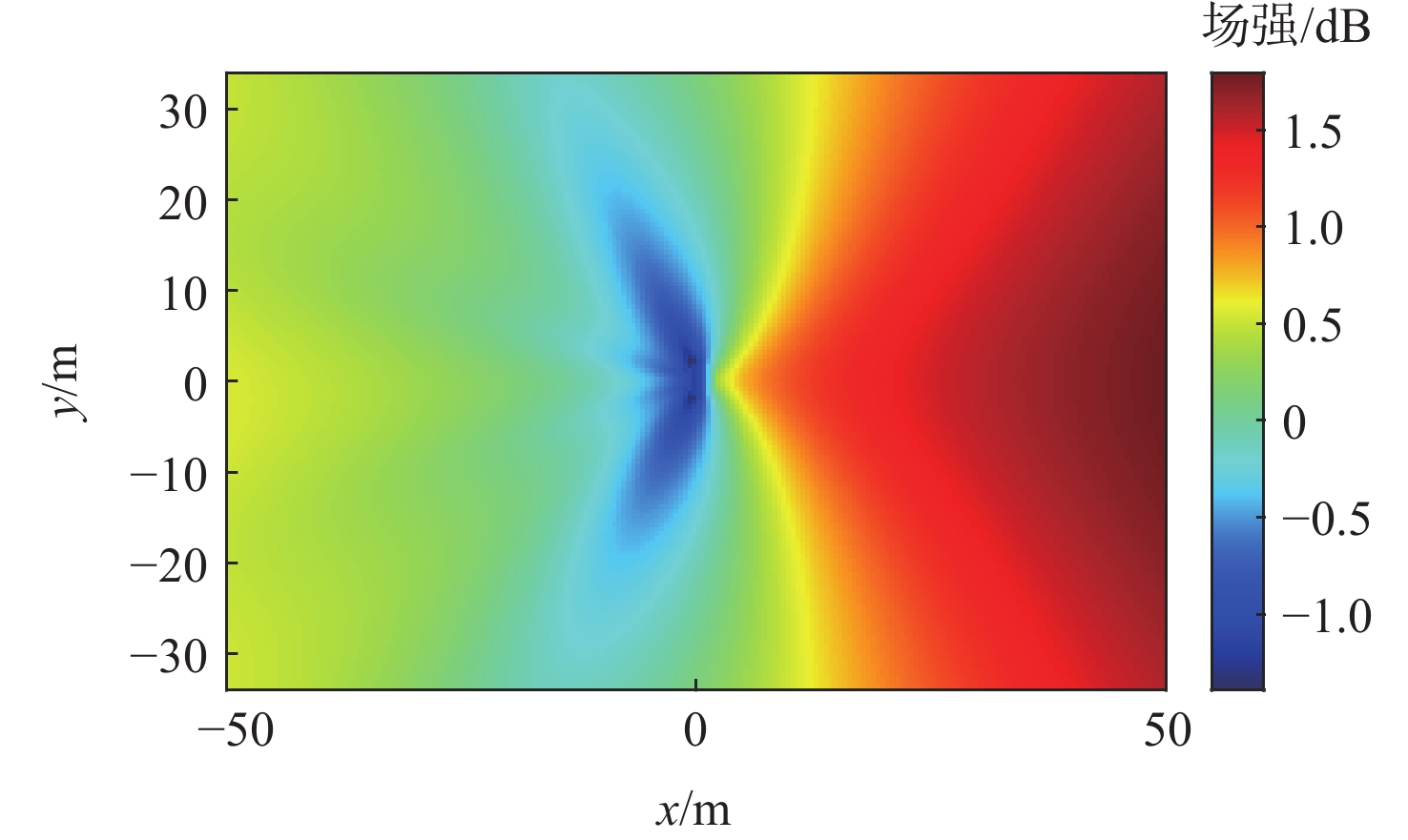
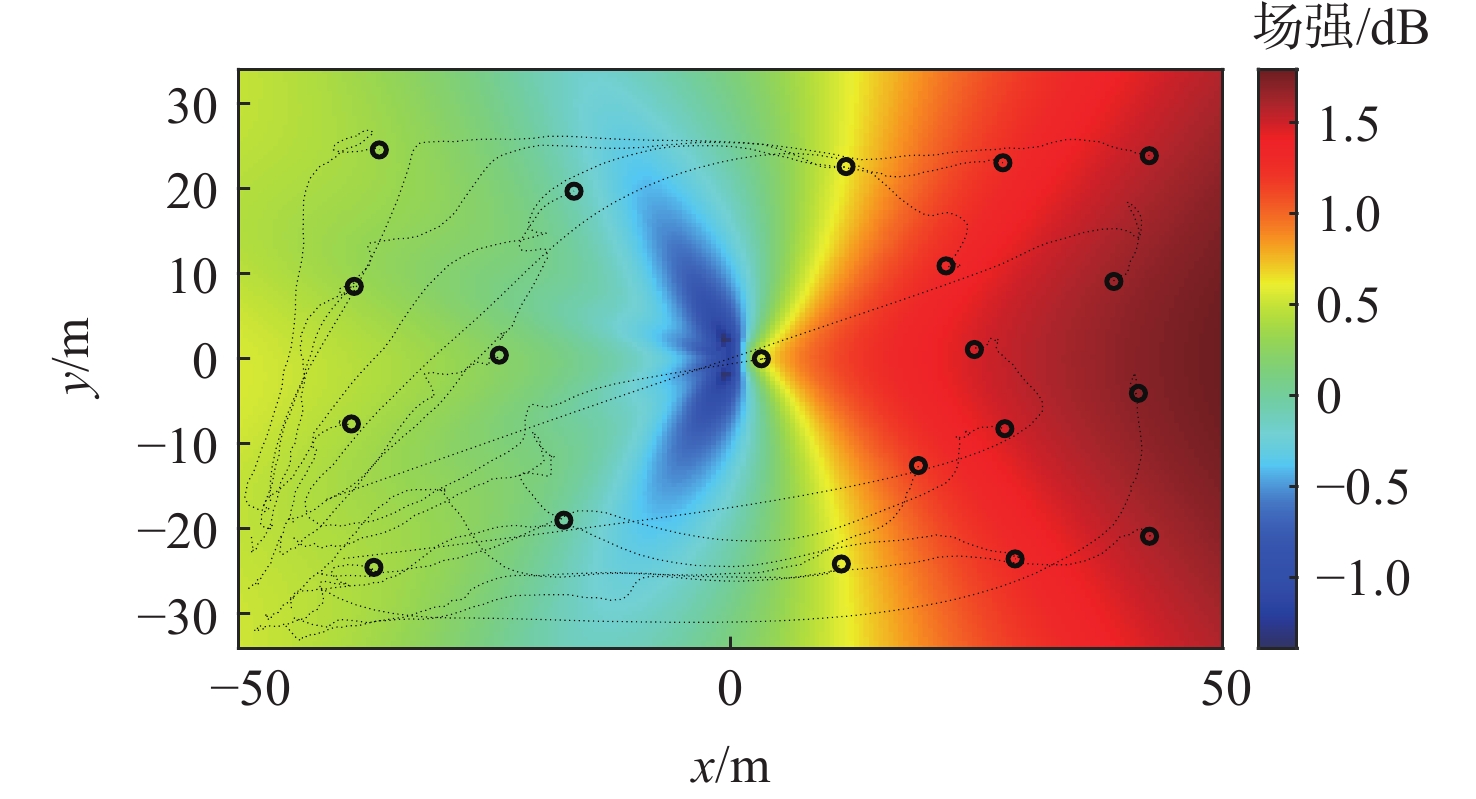
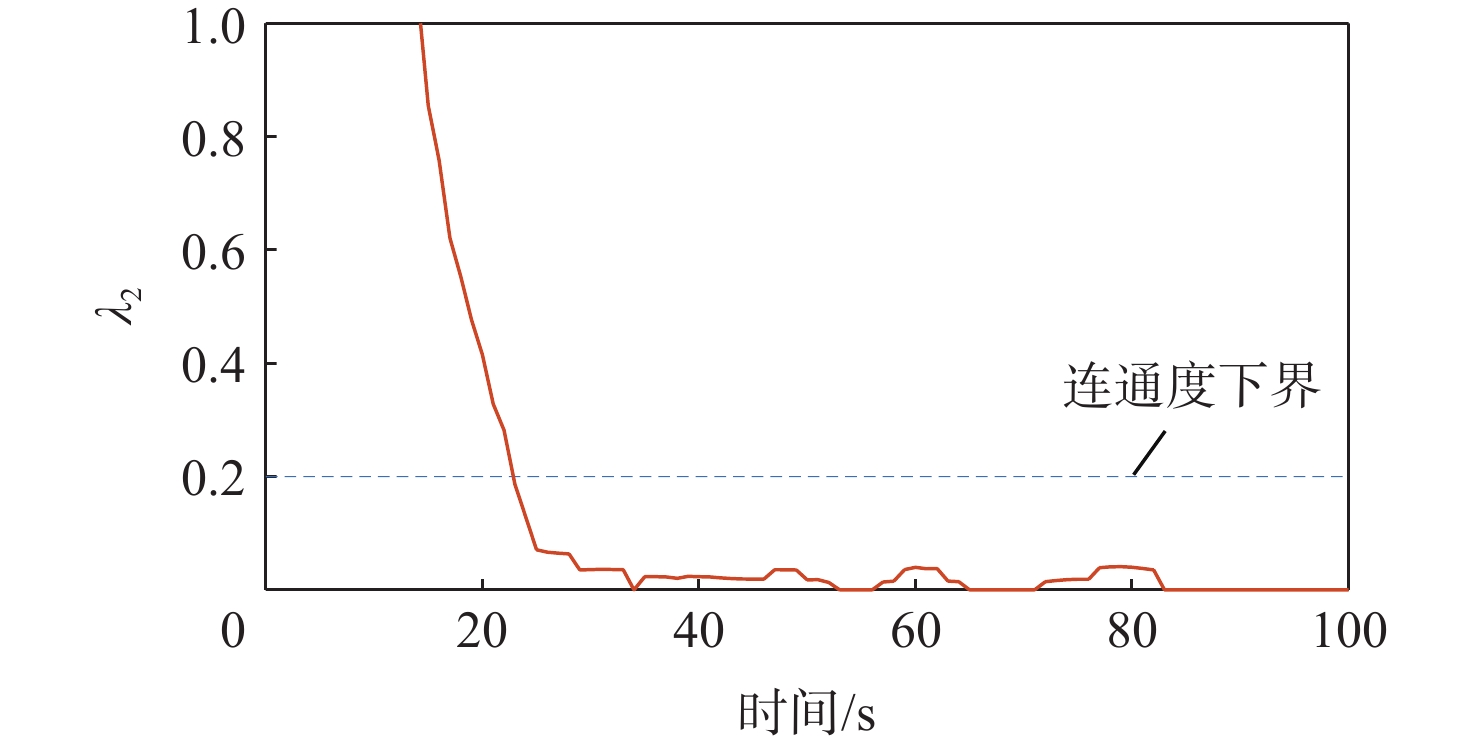
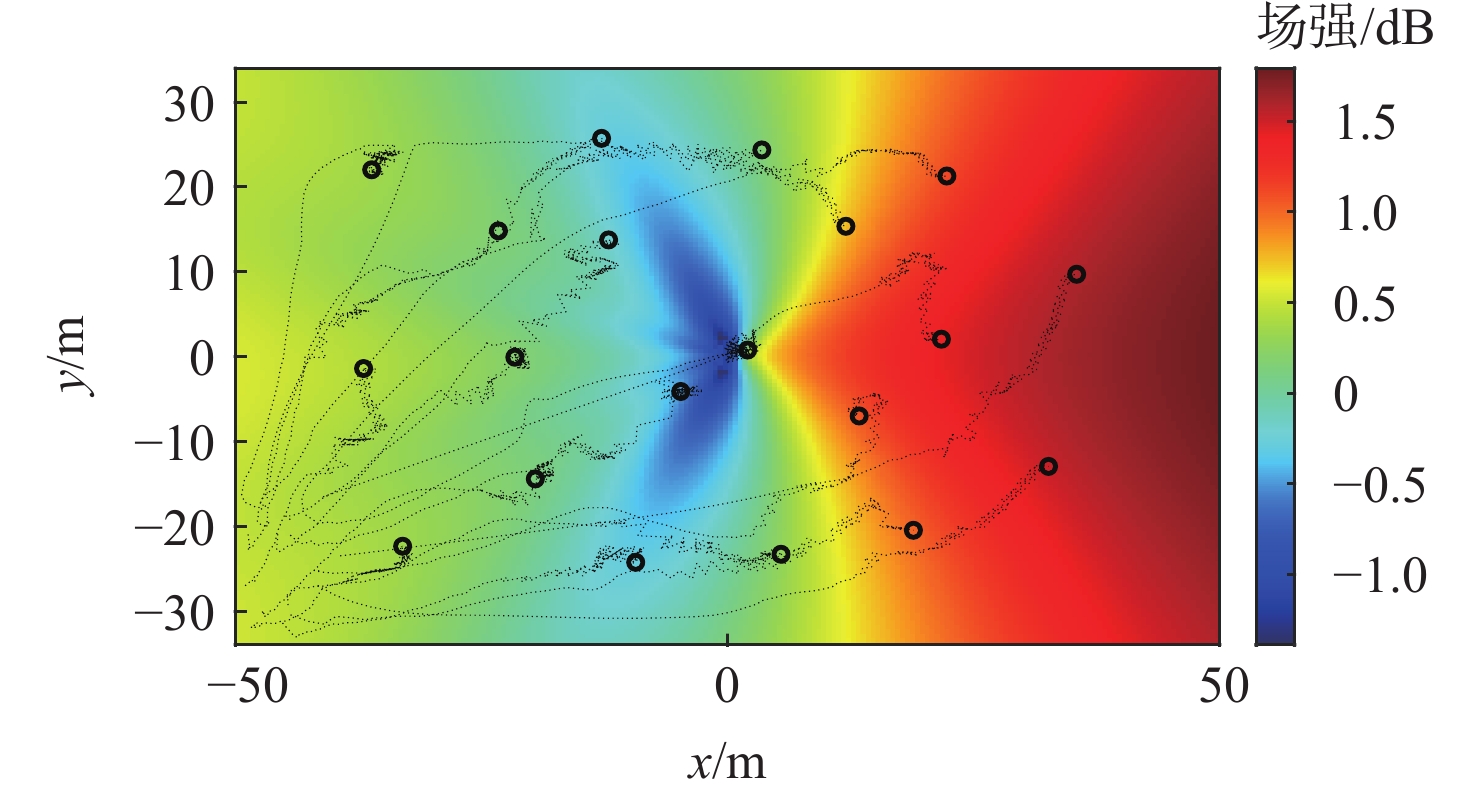
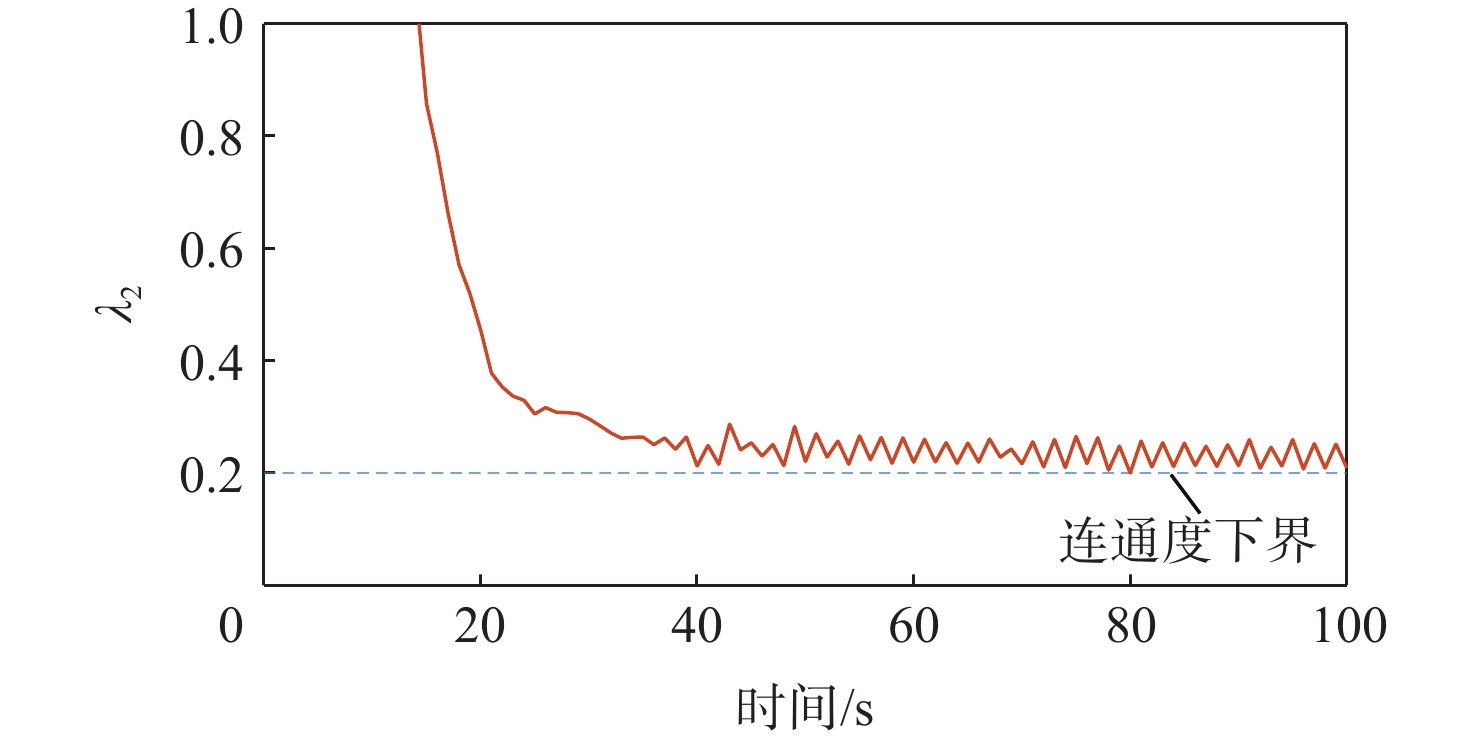
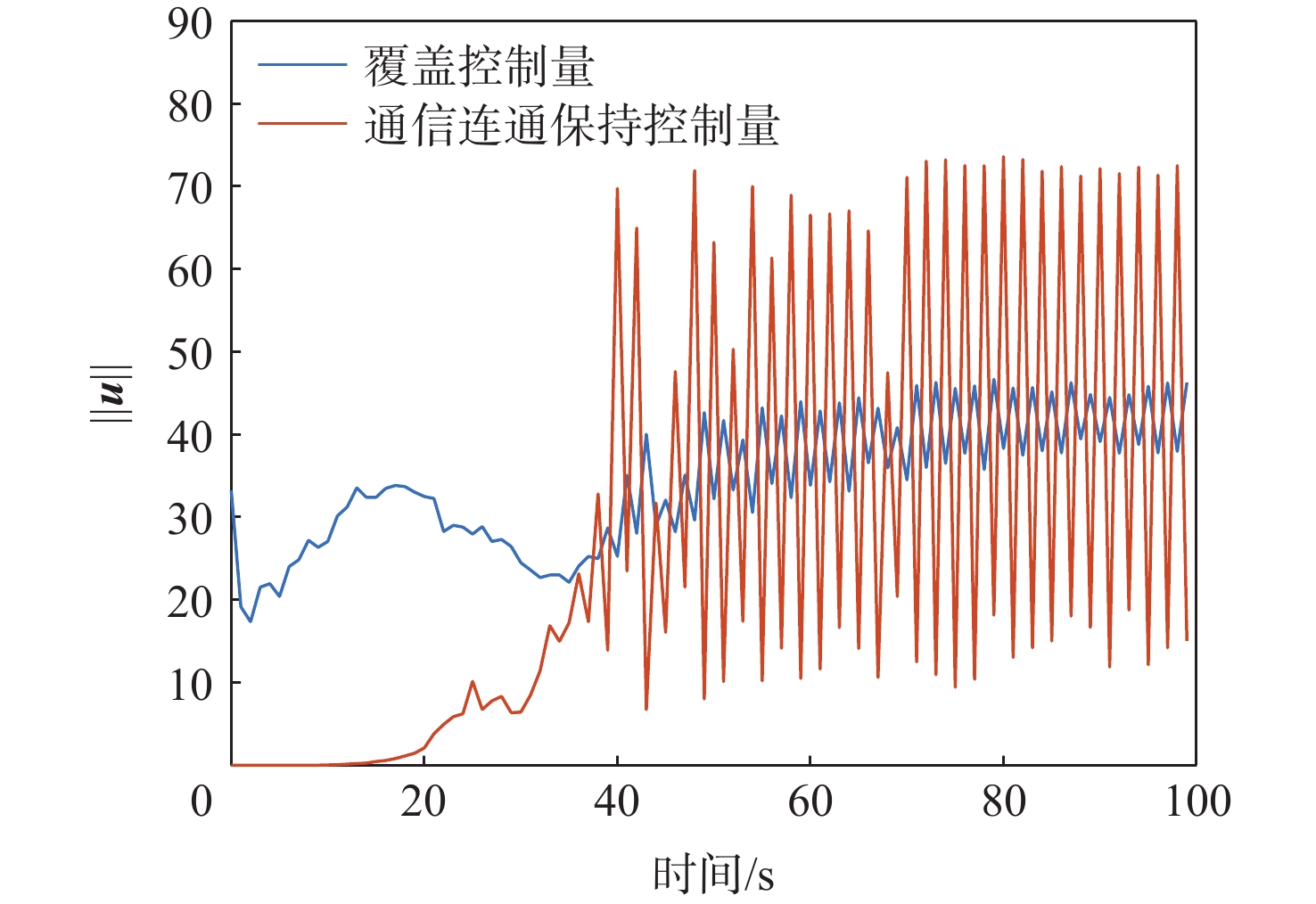
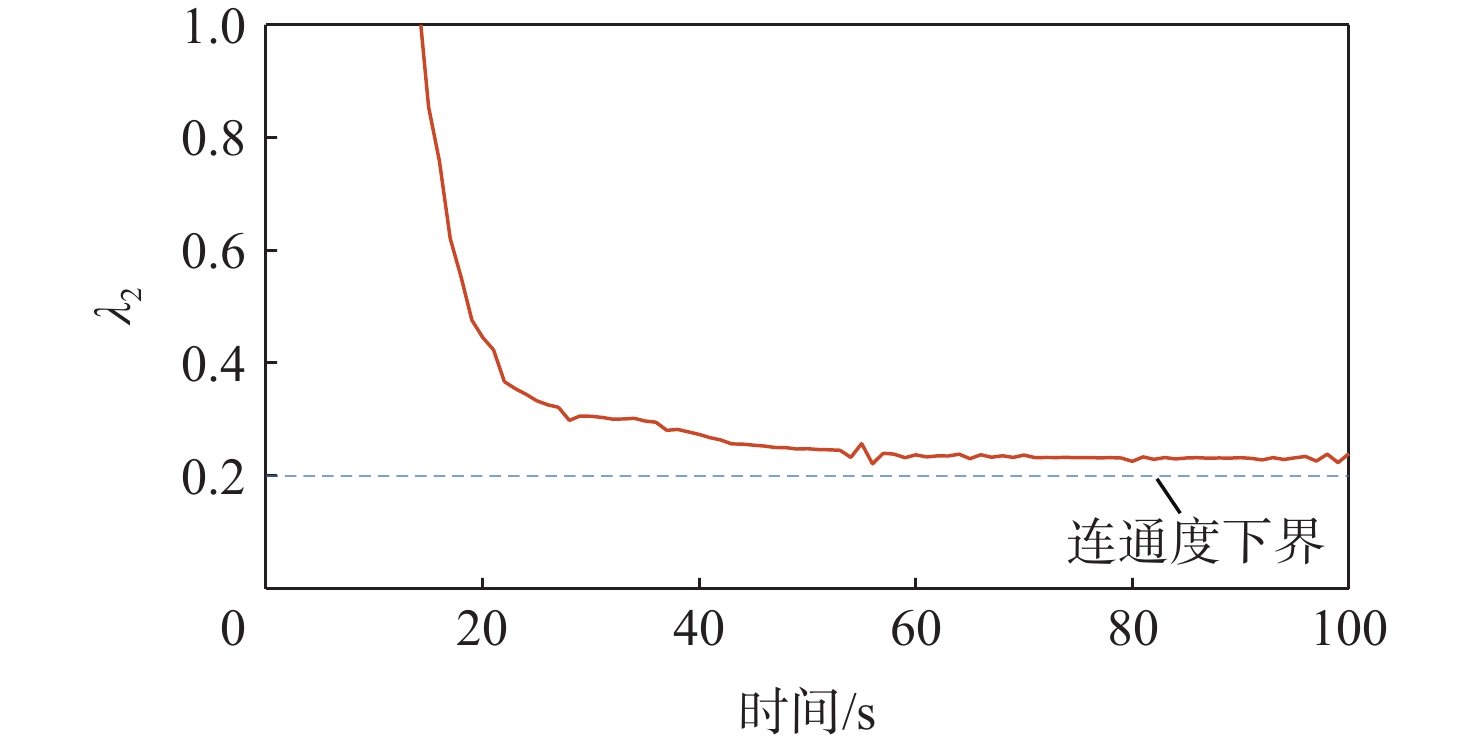
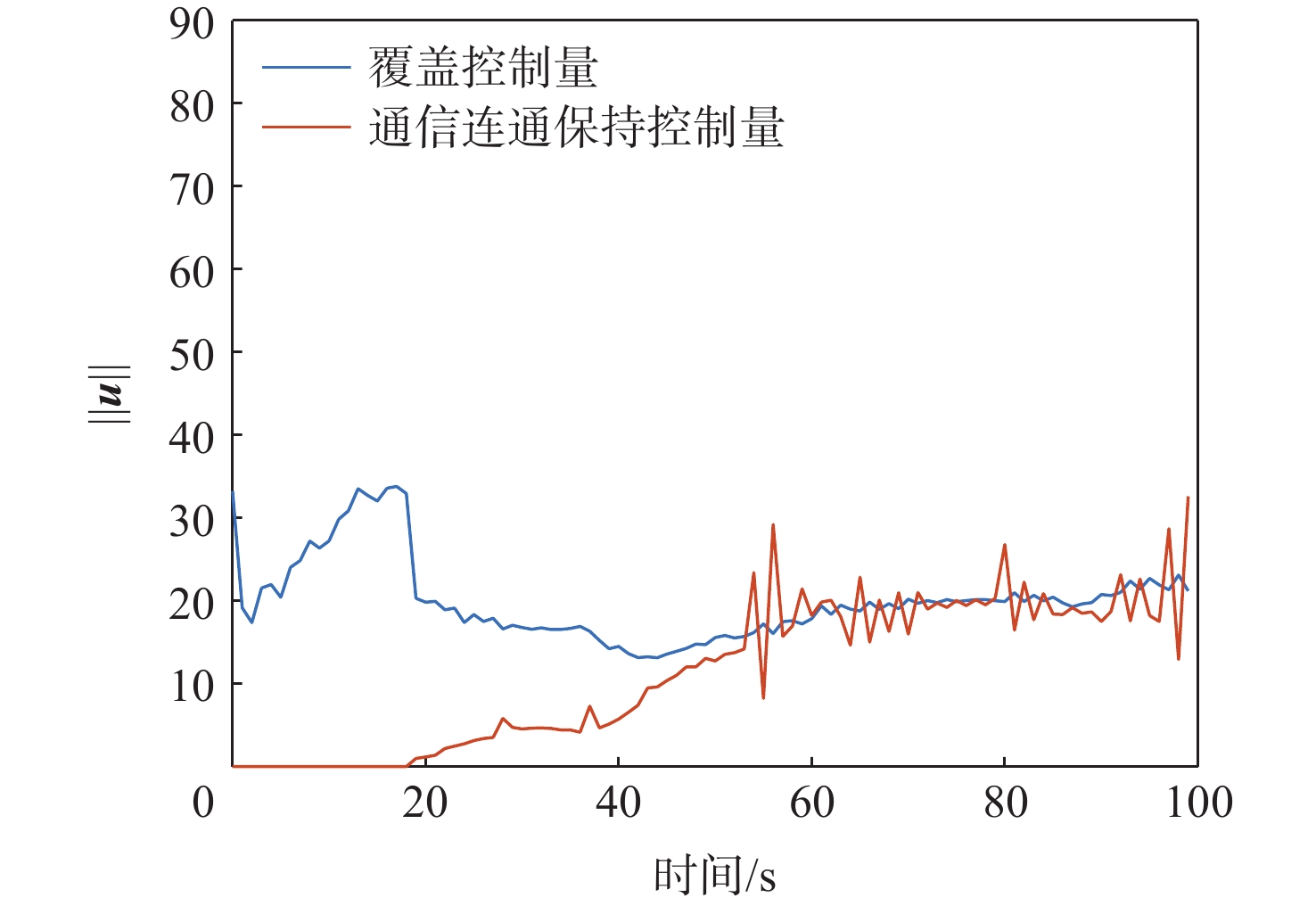
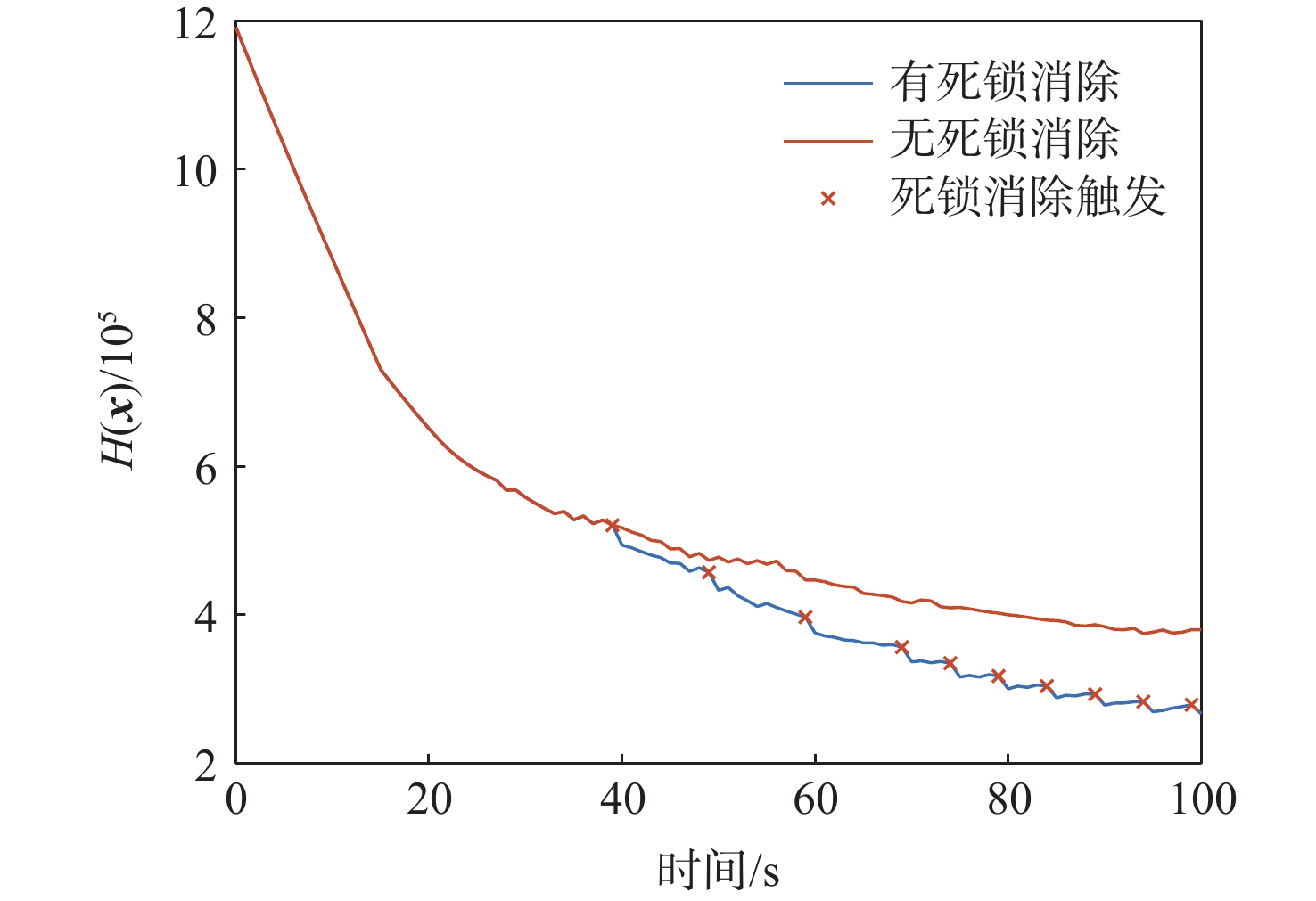
Coverage control will disperse the agents as much as possible according to the environmental information to achieve a better spatial coverage effect and realize the optimal monitoring of the task area. In this process, the cooperation between agents depends on the connected communication network. Limited by the finite communication range of agents in complex electromagnetic environments, the decentralized behavior in coverage control may cause the interruption of the communication network and task failure. Therefore, to ensure that the coverage cost function lowers while the network connectivity does not fall below the predetermined threshold, this study uses the connectivity of the communication network as a constraint and offers a bounded distributed control law based on the gradient descent approach. A segmented control strategy based on the identification of critical agents is also proposed in order to lessen the impact of communication link maintenance on the coverage effect. By dynamically allocating the control gains of coverage and communication connectivity maintenance, the control oscillation and redundancy caused by the opposite movement trend of the two are reduced. Finally, aiming at the deadlock phenomenon of falling into local optimization, this paper proposes a deadlock elimination control, which can eliminate the deadlock in time and improve coverage performance. The coverage simulation experiment of the signal field generated by high-frequency structure simulation (HFSS) software shows the effectiveness of the proposed control laws.

| [1] |
PHAM H X, LA H M, FEIL-SEIFER D, et al. A distributed control framework of multiple unmanned aerial vehicles for dynamic wildfire tracking[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2020, 50(4): 1537-1548.
|
| [2] |
SERAJ E, GOMBOLAY M. Coordinated control of UAVs for human-centered active sensing of wildfires[C]//2020 American Control Conference. Piscataway: IEEE Press, 2020: 1845-1832.
|
| [3] |
KANTOR G, SINGH S, PETERSON R, et al. Distributed search and rescue with robot and sensor teams[M]//Springer Tracts in Advanced Robotics. Berlin, Heidelberg: Springer Berlin Heidelberg, 2006: 529-538.
|
| [4] |
CORTES J, MARTINEZ S, KARATAS T, et al. Coverage control for mobile sensing networks[J]. IEEE Transactions on Robotics and Automation, 2004, 20(2): 243-255. doi: 10.1109/TRA.2004.824698
|
| [5] |
SCHWAGER M, RUS D, SLOTINE J J. Decentralized, adaptive coverage control for networked robots[J]. The International Journal of Robotics Research, 2009, 28(3): 357-375. doi: 10.1177/0278364908100177
|
| [6] |
WU Y L, REN X G, ZHOU H, et al. A survey on multi-robot coordination in electromagnetic adversarial environment: challenges and techniques[J]. IEEE Access, 2020, 8: 53484-53497. doi: 10.1109/ACCESS.2020.2981408
|
| [7] |
LUO W H, SYCARA K. Voronoi-based coverage control with connectivity maintenance for robotic sensor networks[C]//2019 International Symposium on Multi-Robot and Multi-Agent Systems. Piscataway: IEEE Press, 2019: 148-154.
|
| [8] |
董鑫, 李晓丽, 富锦芸. 具有盲区的有向视觉传感器网络连通保持覆盖控制[J]. 计算机应用研究, 2021, 38(10): 3137-3142. doi: 10.19734/j.issn.1001-3695.2021.01.0028
DONG X, LI X L, FU J Y. Dcrected vision sensor network with blind spots keeps conneted and maintains coverage control[J]. Application Research of Computers, 2021, 38(10): 3137-3142(in Chinese). doi: 10.19734/j.issn.1001-3695.2021.01.0028
|
| [9] |
SILIGARDI L, PANERATI J, KAUFMANN M, et al. Robust area coverage with connectivity maintenance [C]//2019 International Conference on Robotics and Automation. New York: ACM, 2019: 2202-2208.
|
| [10] |
KAWAJIRI S, HIRASHIMA K, SHIRAISHI M. Coverage control under connectivity constraints[C]//Proceedings of the 20th International Conference on Autonomous Agents and Multi Agent Systems. Richland: International Foundation for Autonomous Agents and Multiagent Systems, 2021: 1554-1556.
|
| [11] |
KHATERI K, POURGHOLI M, MONTAZERI M, et al. A comparison between decentralized local and global methods for connectivity maintenance of multi-robot networks[J]. IEEE Robotics and Automation Letters, 2019, 4(2): 633-640. doi: 10.1109/LRA.2019.2892552
|
| [12] |
WU S G, PU Z Q, LIU Z, et al. Multi-target coverage with connectivity maintenance using knowledge-incorporated policy framework [C]//2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2021: 8772-8778.
|
| [13] |
LIU Q W, ZHOU S L, GIANNAKIS G B. Cross-layer combining of adaptive modulation and coding with truncated ARQ over wireless links[J]. IEEE Transactions on Wireless Communications, 2004, 3(5): 1746-1755. doi: 10.1109/TWC.2004.833474
|
| [14] |
LIU Q C, YE M B, SUN Z Y, et al. Coverage control of unicycle agents under constant speed constraints[J]. IFAC-PapersOnLine, 2017, 50(1): 2471-2476.
|
| [15] |
SCHWAGER M A. gradient optimization approach to adaptive multi-robot control[D]. Boston: Massachusetts Institute of Technology, 2009: 42-44.
|
| [16] |
YANG P, FREEMAN R A, GORDON G J, et al. Decentralized estimation and control of graph connectivity for mobile sensor networks[J]. Automatica, 2010, 46(2): 390-396. doi: 10.1016/j.automatica.2009.11.012
|
| [17] |
SABATTINI L, CHOPRA N, SECCHI C. Decentralized connectivity maintenance for cooperative control of mobile robotic systems[J]. International Journal of Robotics Research, 2013, 32(12): 1411-1423. doi: 10.1177/0278364913499085
|
| [18] |
BLANCHINI F. Set invariance in control[J]. Automatica, 1999, 35(11): 1747-1767. doi: 10.1016/S0005-1098(99)00113-2
|
| [19] |
CAPELLI B, SABATTINI L. Connectivity maintenance: Global and optimized approach through control barrier functions [C]//2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE Press, 2020: 5590-5596.
|
| [20] |
HUNG P D, VINH T Q, NGO T D. Hierarchical distributed control for global network integrity preservation in multirobot systems[J]. IEEE Transactions on Cybernetics, 2020, 50(3): 1278-1291. doi: 10.1109/TCYB.2019.2913326
|

Figures(11) / Tables(4)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.






 DownLoad:
DownLoad: