| Citation: | XU M,LI Y,GAO J,et al. Design of aircraft anti-skid braking system integral sliding mode control system based on novel reaching law[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(4):1107-1116 (in Chinese) doi: 10.13700/j.bh.1001-5965.2023.0185

|
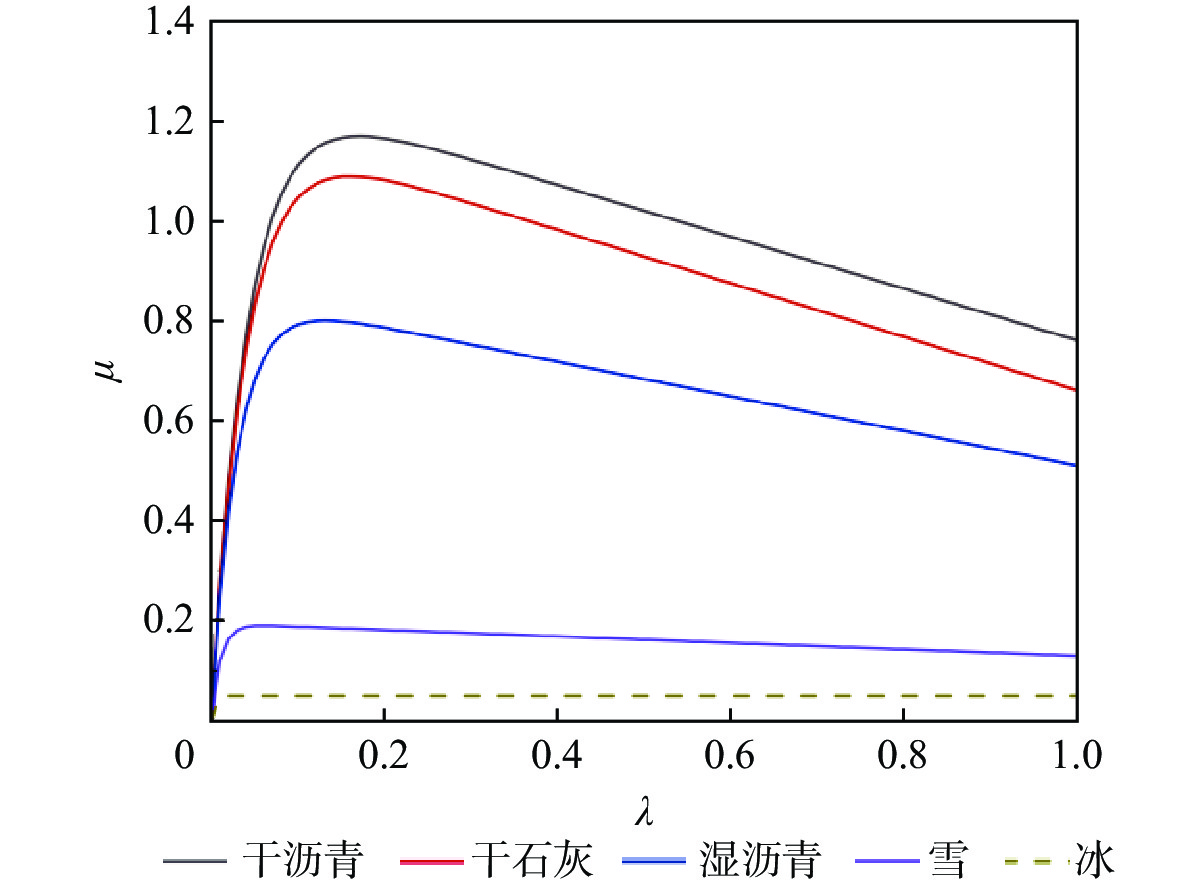
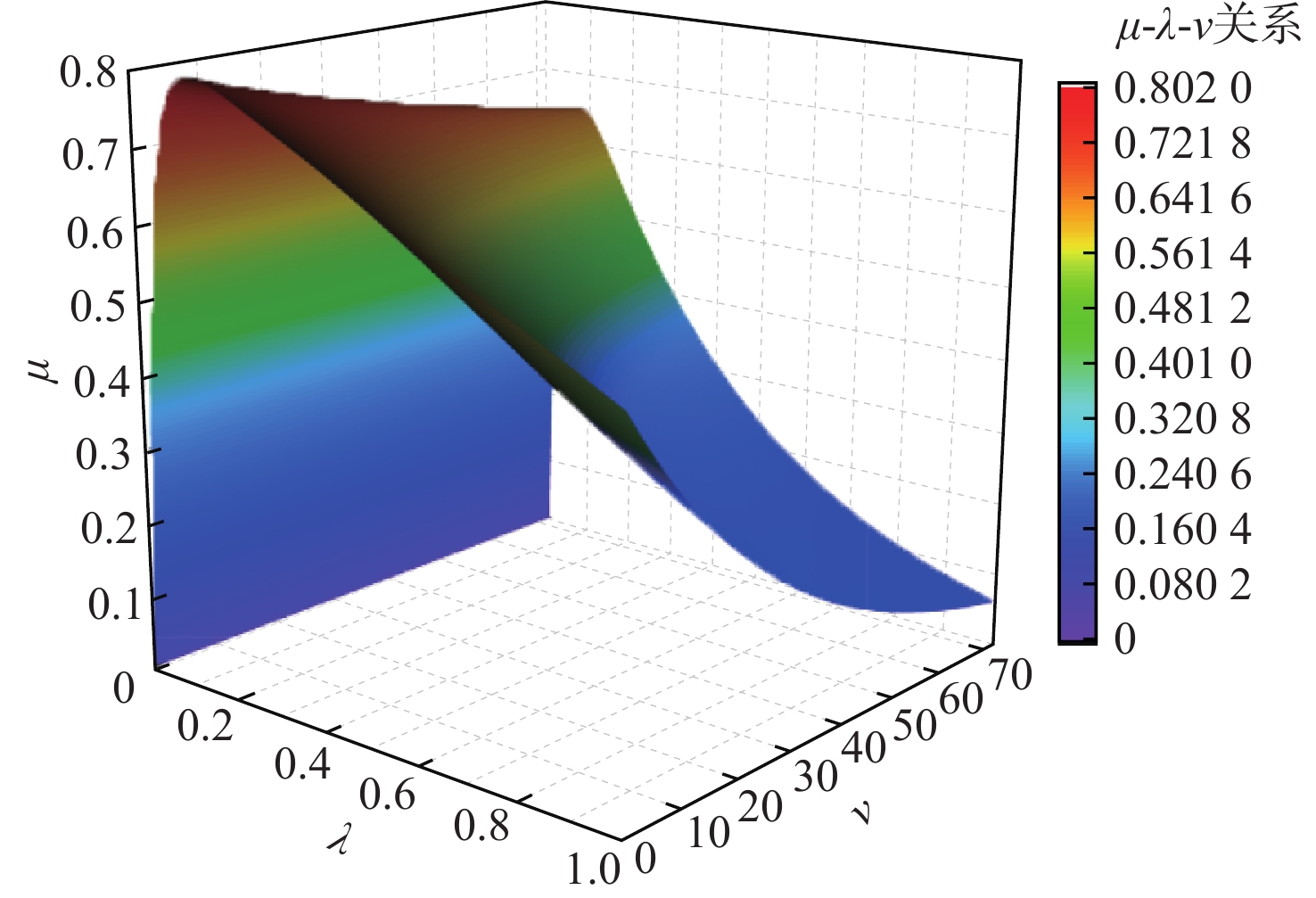
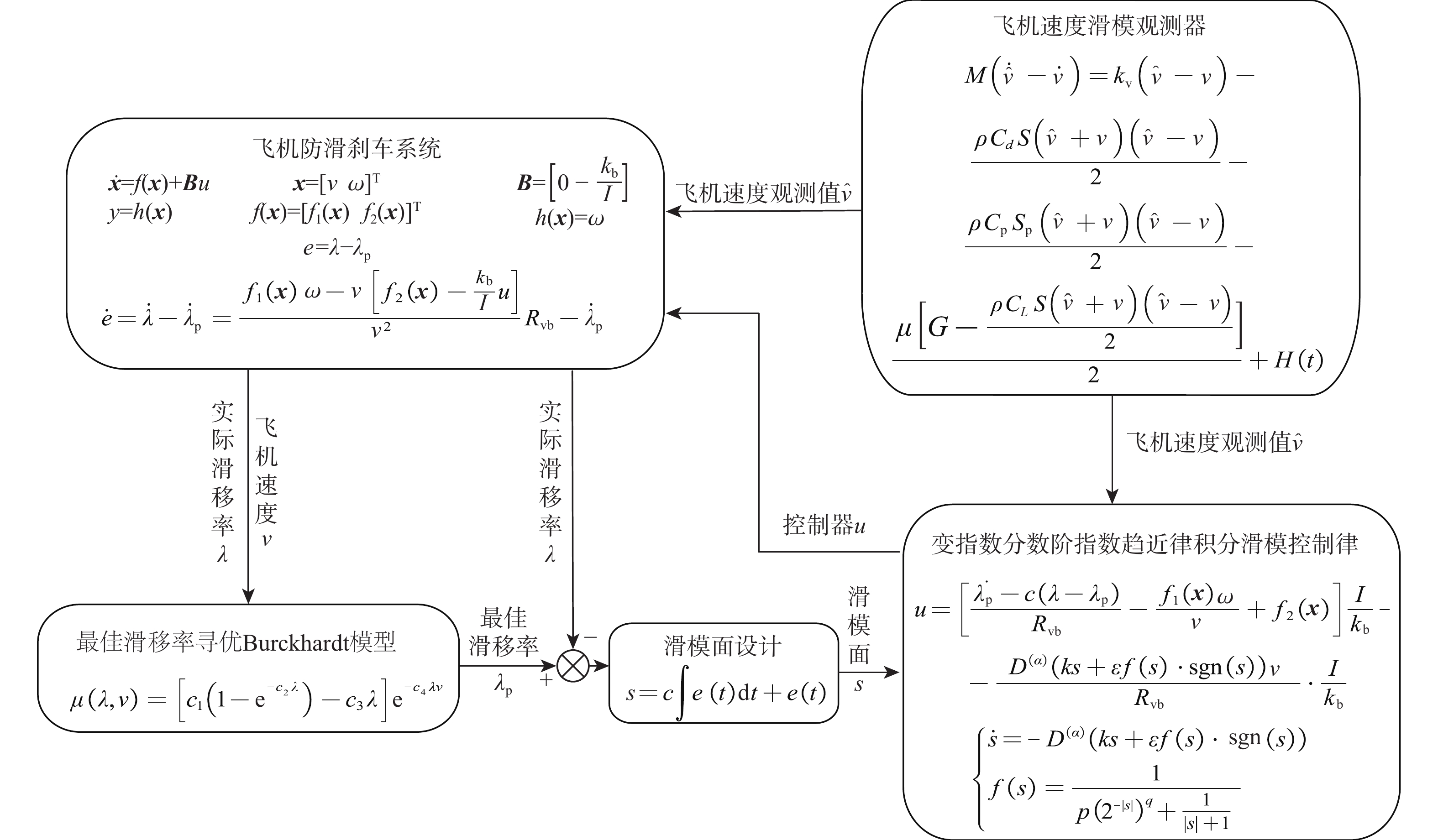
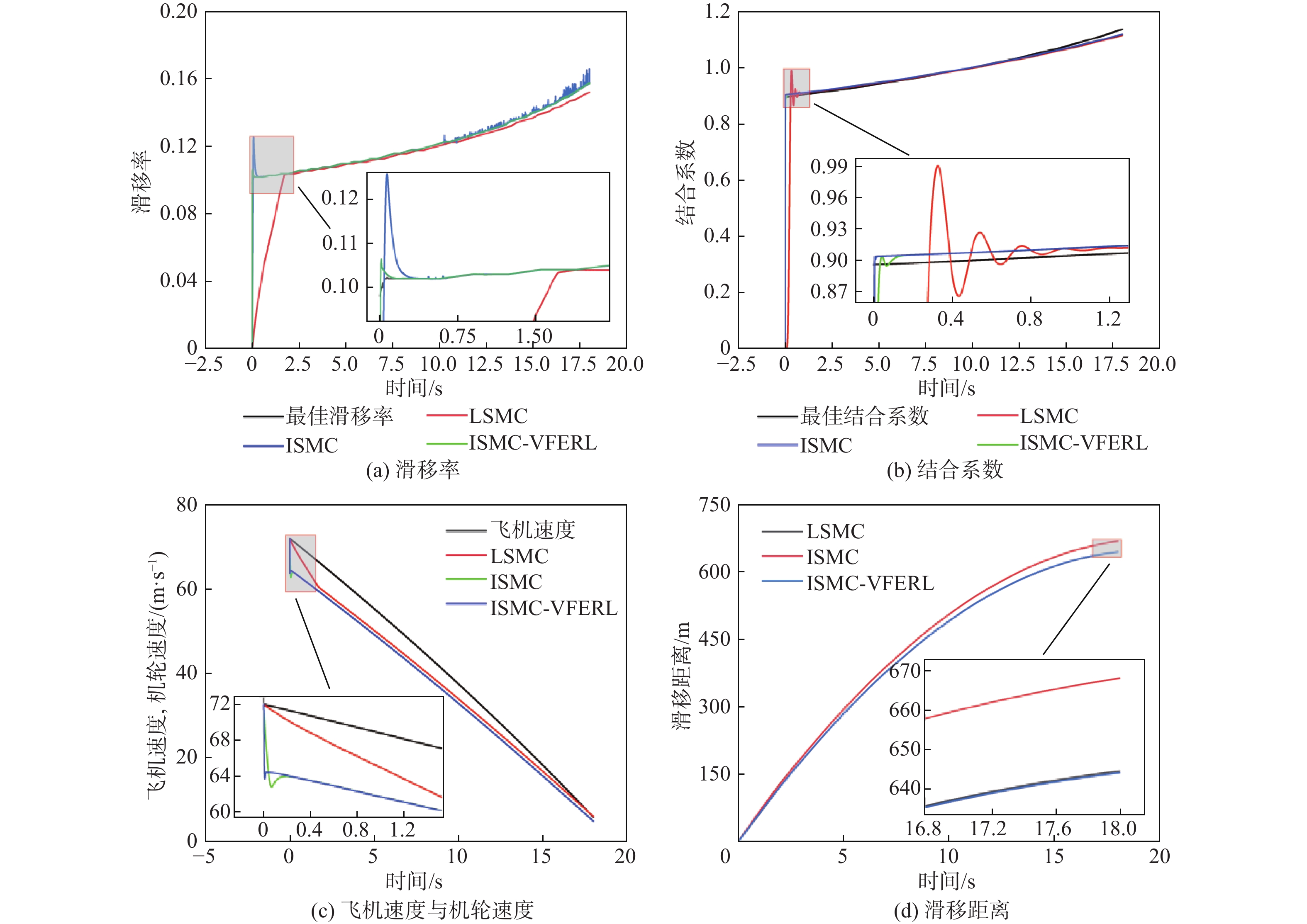
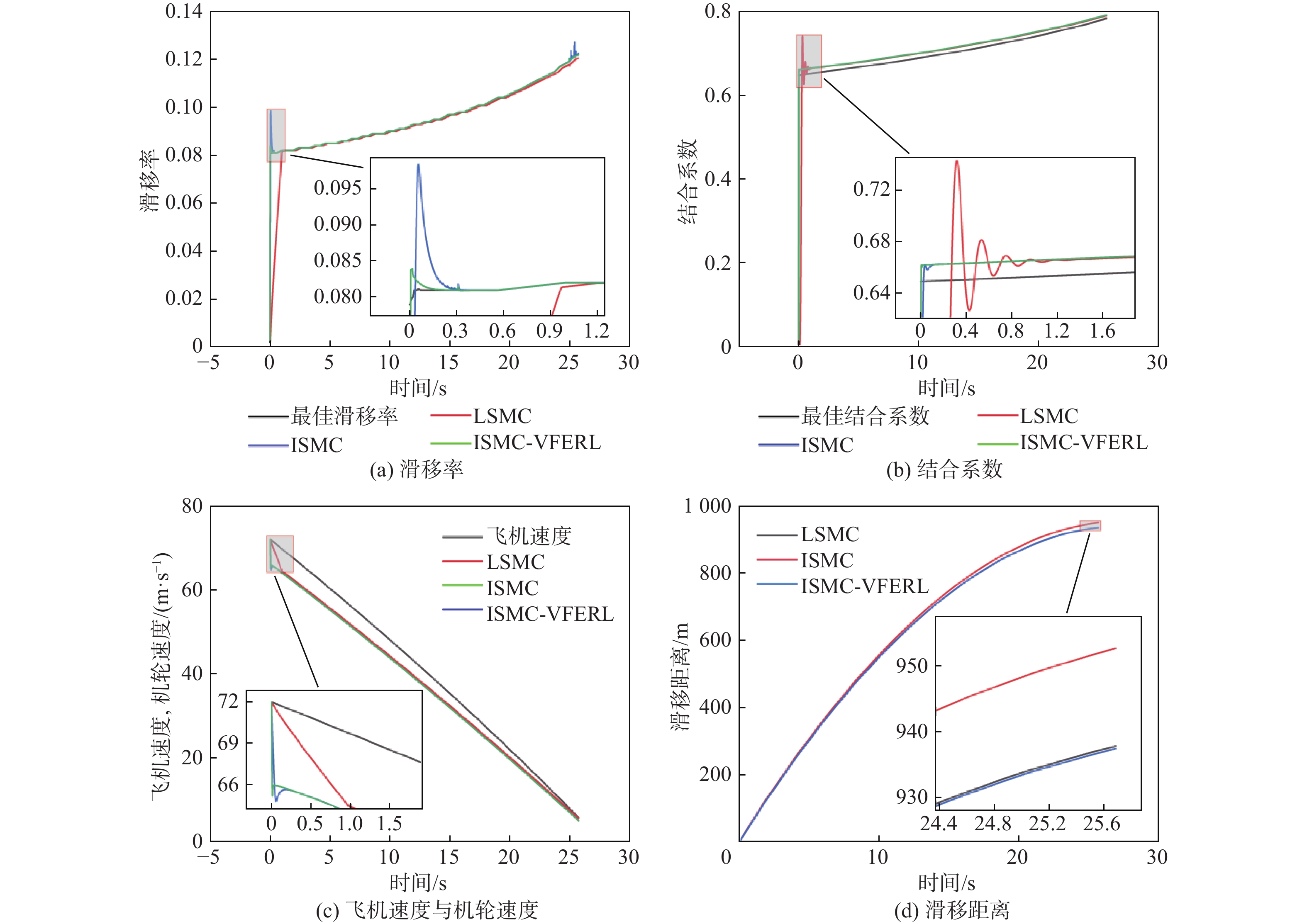
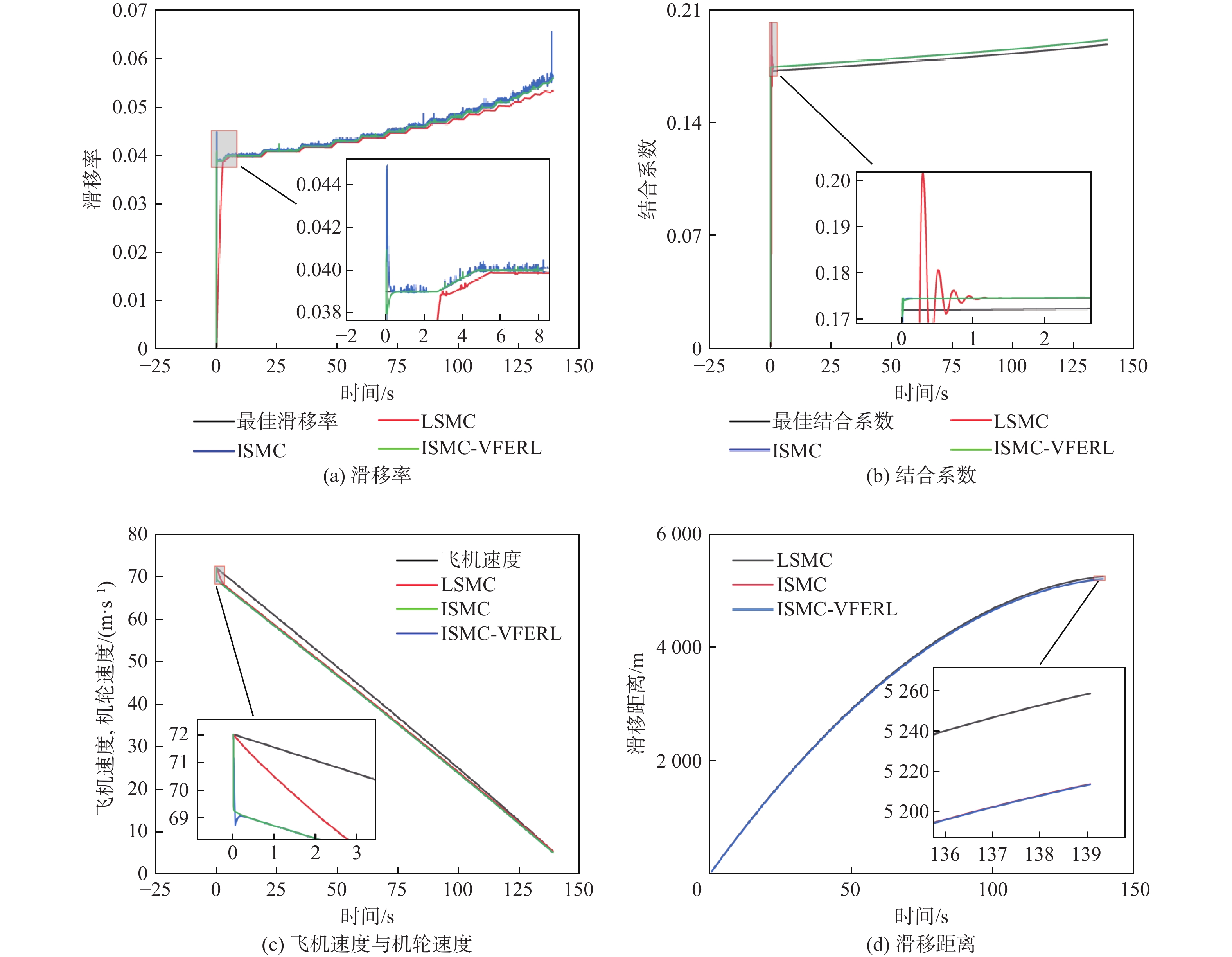
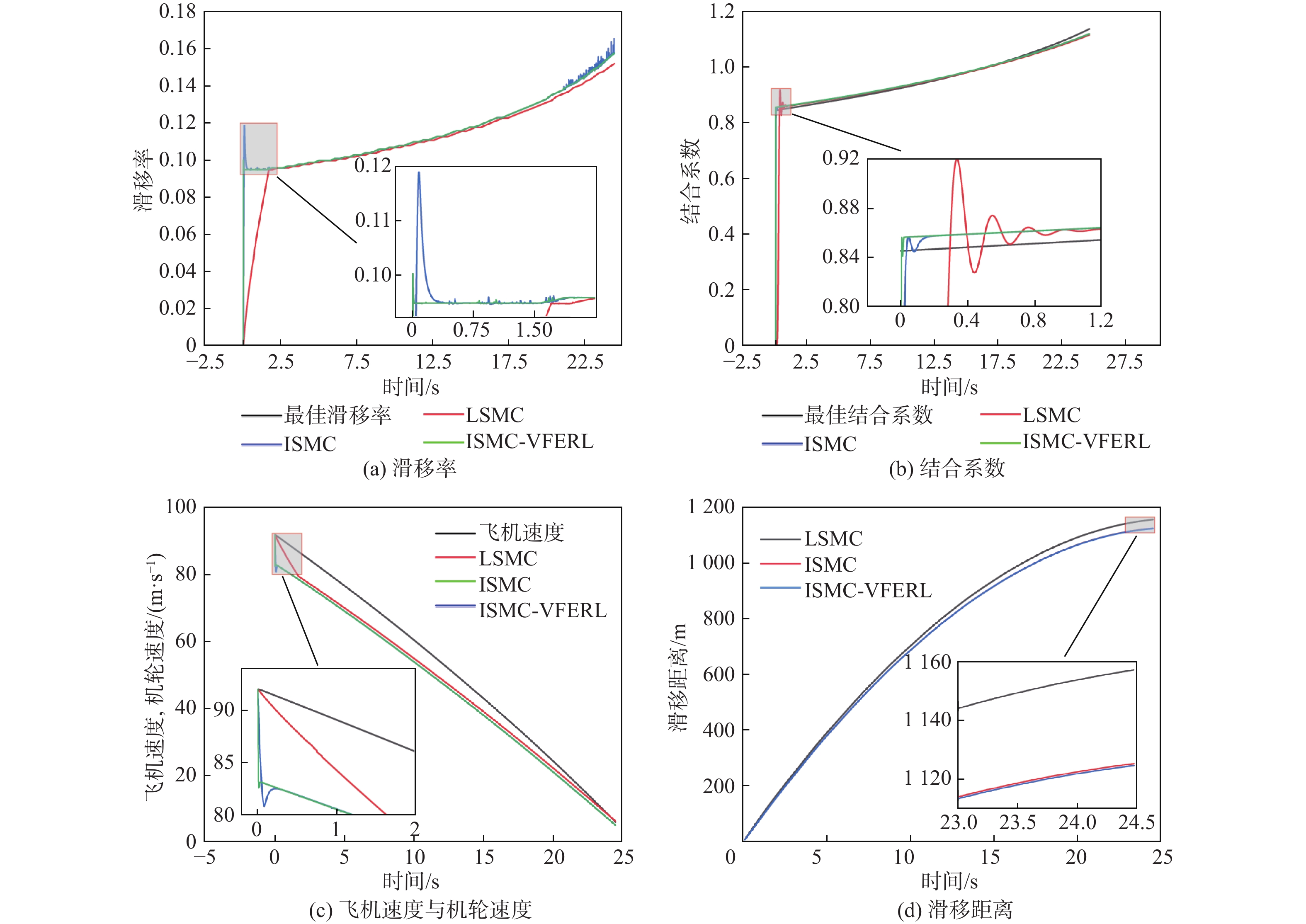
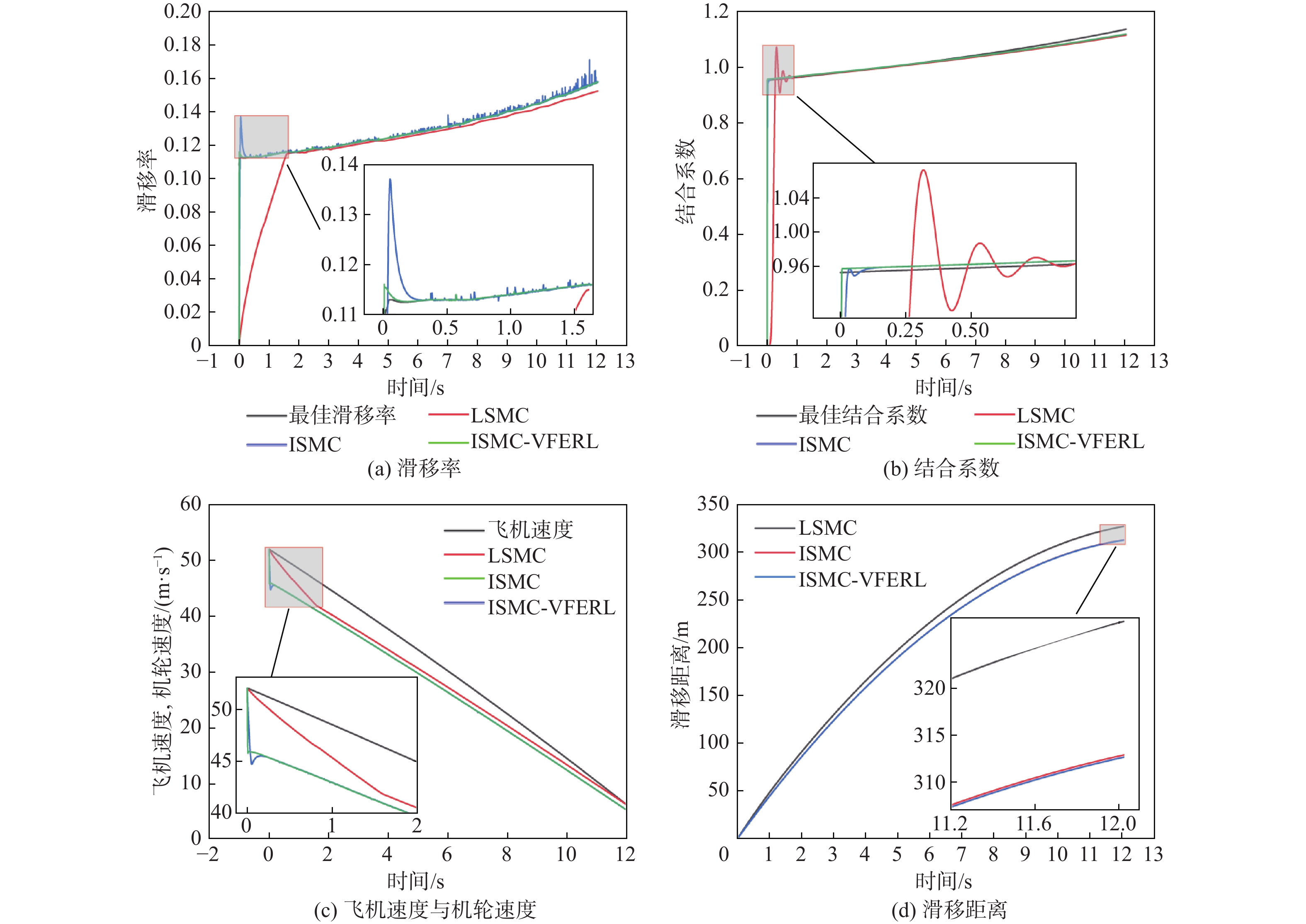
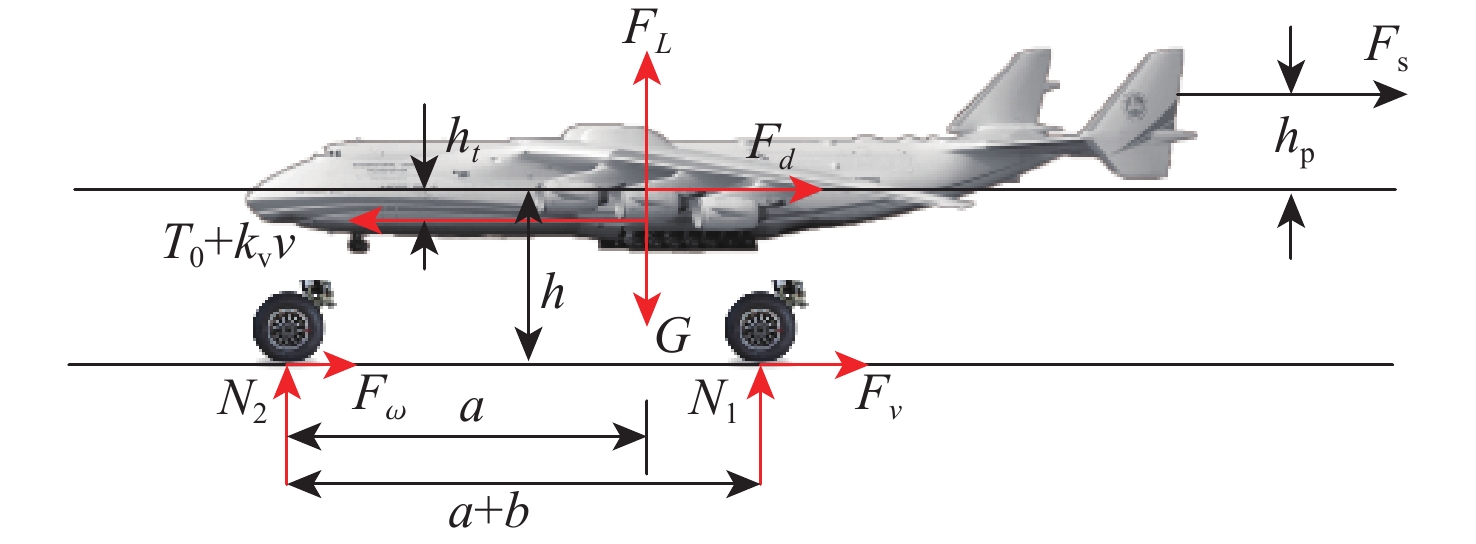
Aircraft anti-skid braking system (AABS) has the characteristics of strong time variability, strong unpredictability, and many internal and external interference factors. Therefore, an integral sliding mode control (ISMC) method of AABS with variable exponential fractional order exponential reaching law was proposed. Firstly, the dynamics model of the aircraft landing system was established. Secondly, in order to improve the rapidity and robustness of the system, a variable structure control method was introduced to realize the tracking of optimal slip rate and optimal binding coefficient. Then,by improving the ISMC law of the exponential fractional order reaching law, the chattering phenomenon was suppressed, and the tracking speed to the optimal slip rate was accelerated. In addition, a sliding mode observer was designed to observe the aircraft speed to reduce the internal and external nonlinear interference. Finally, the feasibility and effectiveness of the algorithm were verified by the MATLAB simulation platform. The simulation results show that the overall control effect of the designed integral sliding mode controller with variable exponential fractional order reaching law is better than the traditional linear sliding mode controller, and the sliding mode observer can accurately estimate the aircraft speed.The method improves the robustness of the overall system design and shortens the braking time and braking distance, and the control effect is great.
| [1] |
DU C L, LI F B, YANG C H, et al. Multiphase-based optimal slip ratio tracking control of aircraft antiskid braking system via second-order sliding-mode approach[J]. IEEE/ASME Transactions on Mechatronics, 2021, 27(2): 823-833.
|
| [2] |
MENG Y Z, JIANG B, QI R Y. Adaptive fault-tolerant attitude tracking control of hypersonic vehicle subject to unexpected centroid-shift and state constraints[J]. Aerospace Science and Technology, 2019, 95: 105515. doi: 10.1016/j.ast.2019.105515
|
| [3] |
JIAO Z X, SUN D, SHANG Y X, et al. A high efficiency aircraft anti-skid brake control with runway identification[J]. Aerospace Science and Technology, 2019, 91: 82-95. doi: 10.1016/j.ast.2019.05.001
|
| [4] |
QIU Y N, LIANG X G, DAI Z Y. Backstepping dynamic surface control for an anti-skid braking system[J]. Control Engineering Practice, 2015, 42: 140-152. doi: 10.1016/j.conengprac.2015.05.013
|
| [5] |
TANG Y G, ZHANG X Y, ZHANG D L, et al. Fractional order sliding mode controller design for antilock braking systems[J]. Neurocomputing, 2013, 111: 122-130. doi: 10.1016/j.neucom.2012.12.019
|
| [6] |
HUŠEK P. Adaptive sliding mode control with moving sliding surface[J]. Applied Soft Computing, 2016, 42: 178-183. doi: 10.1016/j.asoc.2016.01.009
|
| [7] |
SAVITSKI D, IVANOV V, AUGSBURG K, et al. Wheel slip control for the electric vehicle with in-wheel motors: variable structure and sliding mode methods[J]. IEEE Transactions on Industrial Electronics, 2019, 67(10): 8535-8544.
|
| [8] |
LI L B, SUN L L, ZHANG S Z. Mean deviation coupling synchronous control for multiple motors via second-order adaptive sliding mode control[J]. ISA Transactions, 2016, 62: 222-235. doi: 10.1016/j.isatra.2016.01.015
|
| [9] |
JIAO Z X, WANG Z Z, SUN D, et al. A novel aircraft anti-skid brake control method based on runway maximum friction tracking algorithm[J]. Aerospace Science and Technology, 2021, 110: 106482. doi: 10.1016/j.ast.2020.106482
|
| [10] |
D’AVICO L, TANELLI M, SAVARESI S M, et al. An anti-skid braking system for aircraft via mixed-slip-deceleration control and sliding mode observer[C]//Proceedings of the IEEE 56th Annual Conference on Decision and Control. Piscataway: IEEE Press, 2017: 4503-4508.
|
| [11] |
CHEN M Q, XU F R, LIANG X L, et al. MSD-based NMPC aircraft anti-skid brake control method considering runway variation[J]. IEEE Access, 2021, 9: 51793-51804. doi: 10.1109/ACCESS.2021.3070066
|
| [12] |
李繁飙, 黄培铭, 阳春华, 等. 基于非线性干扰观测器的飞机全电刹车系统滑模控制设计[J]. 自动化学报, 2021, 47(11): 2557-2569.
LI F B, HUANG P M, YANG C H, et al. Sliding mode control design of aircraft electric brake system based on nonlinear disturbance observer[J]. Acta Automatica Sinica, 2021, 47(11): 2557-2569(in Chinese).
|
| [13] |
BAKKER E, NYBORG L, PACEJKA H B. Tyre modelling for use in vehicle dynamics studies[R]. Warrendale: SAE International, 1987: 190-204.
|
| [14] |
KIENCKE U, NIELSON L. Automotive control systems: forengine, driveline, and vehicle[J]. Measurement Science and Technology, 2000, 11(12): 1828.
|
| [15] |
林程, 梁晟, 宫新乐, 等. 面向极限工况的分布式驱动电动汽车动力学集成控制方法[J]. 汽车工程, 2022, 44(9): 1372-1385.
LIN C, LIANG S, GONG X L, et al. Integrated dynamic control strategy for extreme maneuvers of 4WIDEVs[J]. Automotive Engineering, 2022, 44(9): 1372-1385(in Chinese).
|
| [16] |
EFE M O. Fractional fuzzy adaptive sliding-mode control of a 2-DOF direct-drive robot arm[J]. IEEE Transactions on Systems, Man, and Cybernetics Part B, Cybernetics, 2008, 38(6): 1561-1570. doi: 10.1109/TSMCB.2008.928227
|
| [1] | GUO Shiluo, CHANG Limin, TANG Rui, LI Dong, LI Feng. Adaptive robust CKF and its application in SINS dynamic alignment[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0765 |
| [2] | LI T,ZHAO Y Q,XU T,et al. Stability control of vehicles powered by non-pneumatic wheels based on robust optimal sliding mode[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(4):1342-1351 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0238. |
| [3] | LIU H,HUANG S,TU H Y. Quadrotor sliding mode control based on predefined time[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1665-1674 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0481. |
| [4] | FAN Zhi-wen, SONG Xiao-juan, LU: Shu-feng, YUE Bao-zeng. Fixed-time sliding mode fault-tolerant control for liquid-filled spacecraft[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0736 |
| [5] | LIU W,YAN S,WANG X B,et al. Consensus control of multi-agent systems with uncertain communication networks[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1463-1473 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0518. |
| [6] | ZHANG Yonghua, WANG Zheng, WANG Shiyu, BAI Yunfei, QIU Likuan. Robust Guidance Method for Reusable Rocket Landing Phase based on UMPSP[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0491 |
| [7] | LI H H,HAN Y H. Robust anti-swing technology for helicopter slung load based on wave control[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1629-1638 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0326. |
| [8] | MA Z W,BAI H,CHEN H B,et al. RBF neural network robust adaptive control of quadrotor aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(5):1620-1628 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0595. |
| [9] | YANG R R,ZHANG L,ZHAO J L,et al. Nonlinear variable damping integral sliding mode control for electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):163-172 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0252. |
| [10] | XIE M J,DUAN J Q,MA W R,et al. Sliding mode control for electric braking systems of aircraft based on prescribed performance[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(1):260-267 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0229. |
| [11] | REN Hao-yuan, CHENG Tao, ZHANG Cheng, CAI Yi-peng, LIU Fei, ZHANG Wei-qun. A flutter suppression method for multi-freepalys folding fin based on sliding mode control and fin shaft drive[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0466 |
| [12] | TAN Cao, HAO Ming-ji, LU Jia-yu, WEI Qing-kun, REN Hao-xin. Improved PMSM Fast Super-twisted Sliding Mode Position Tracking Control[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0612 |
| [13] | TANG Z Y,MA F Y,PEI Z C. Improved PSO-RBF neural network adaptive sliding mode control for quadrotor systems[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(7):1563-1572 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0477. |
| [14] | WANG C Y,YANG L M,LI Y H. A mapping leader formation control strategy for multiple mobile robots based on two-stage sliding mode control[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3108-3114 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0792. |
| [15] | LU P,ZHAO Z M,GAO T,et al. Thermal control design and verification for high resolution stereo mapping camera system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):768-779 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0854. |
| [16] | ZHANG H Y,WU W W,HUA H,et al. Evolution characteristics of China’s international air transport network under impact of COVID-19[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2699-2710 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0747. |
| [17] | XIAO R Y,YU J,MA Z X. Applicability of convolutional autoencoder in reduced-order model of unsteady compressible flows[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3445-3455 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0085. |
| [18] | XU Meng, LI Yan, GAO Jie, XU Hai, GAO Bing. Design of aircraft anti-skid braking system integrated sliding mode control based on novel convergence law[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.1085 |
| [19] | DENG B H,XU J F. Active disturbance rejection control of attitude of compound unmanned helicopter[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3100-3107 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0788. |
| [20] | XU Lingliang, CHEN Guiming, LI Qiaoyang. Ultra-local model-free speed predictive control based on ESO for PMSM[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2204-2214. doi: 10.13700/j.bh.1001-5965.2021.0085 |

Figures(10) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

ZENG Jian-ping, CHENG Peng, ZHANG Li-junet al. Improved Solvable Condition for H∞ Control Problem via State Feedback[J]. Journal of Beijing University of Aeronautics and Astronautics, 2002, 28(1): 4-7. (in Chinese)




 DownLoad:
DownLoad: