



Gust alleviation control for flying-wing UAV by control surface based on limited parameter variation rate
-
摘要:
飞翼无人机具有俯仰惯量低、纵向稳定性弱等问题,使其阵风响应对飞行参数的变化较为敏感,并且飞翼无人机的舵面较多,不同的控制策略下阵风减缓的效果不同。因此,对这类飞行器进行考虑参数变化率阵风减缓线性变参数(LPV)控制律设计,并对不同舵面组合方式的控制性能展开对比研究。结合参数依赖的Lyapunov函数方法和变参斜投影降阶算法,构建了同时考虑参数变化率限制和模型降阶条件的LPV阵风减缓控制器。基于该方法对Mini-MUTT飞翼无人机模型设计LPV阵风减缓控制器;探究了不同舵面控制策略对减缓效果的影响。结果表明:采用变参斜投影降阶算法得到的降阶模型可有效表征全阶模型的动力学特性;设计的LPV阵风减缓控制器能够保证阵风在较宽速度范围内有效减缓;在单一舵面阵风减缓中,置于外侧的舵面控制效果优于内侧舵面;而在双舵面阵风减缓中,双舵面的控制效果优于单一舵面,但控制所需输入能量也会增加。在工程应用中需要针对具体问题,综合考虑控制效果和能量消耗以确定合适的控制策略。
Abstract:The flying-wing UAV has problems such as low pitching inertia and weak longitudinal stability, and as a result, its gust alleviation characteristics are sensitive to the changes in flight parameters. Furthermore, the flying-wing UAV has multiple control surfaces, the control effects of different placements of control surfaces are generally various. Therefore, the Linear Parameter Varying (LPV) control law design considering parameter variation rate for gust alleviation of this kind of aircraft and the research on the effects of different control surface placements are of great significance. Combined with the parameter-dependent Lyapunov function method and the parameter-varying oblique projection reduction algorithm, an LPV gust alleviation controller considering both parameter variation rate and model reduction is constructed. Based on this method, the LPV gust alleviation controller is designed for the Mini-MUTT flying-wing UAV model, and the influence of different strategies of control surface placement on the control performance is studied. The result shows that the reduced-order model obtained by the parameter-varying oblique projection reduction algorithm can effectively represent the dynamic characteristics of the full-order model. The designed LPV controller can guarantee the effective alleviation of the gust in a wide speed range. In the strategy that single control surface is considered, the control effect of the outboard control surface is superior to that of the inboard one. In addition, the control effect of double control surfaces is better than that of the single one, but the energy of control input of double control surfaces is greater than that of the single one. As a result, the control effect and energy consumption should be considered comprehensively to determine the appropriate control strategy for specific problems in engineering application.
-

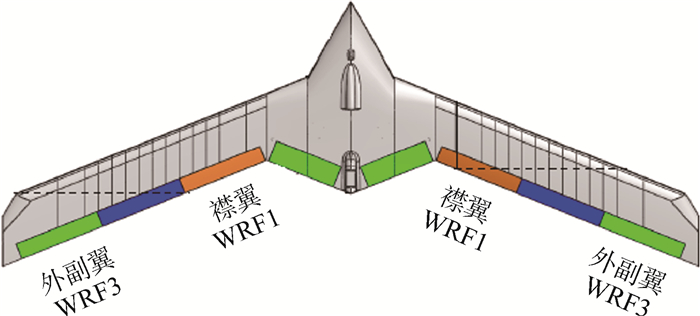
图 1 Mini-MUTT飞翼无人机传感器及舵面配置
Figure 1. Sensors and control surface placement of Mini-MUTT flying-wing UAV

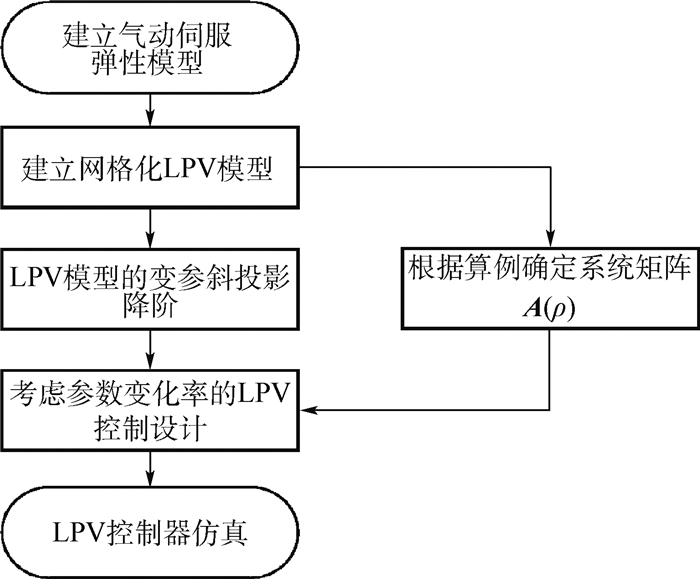
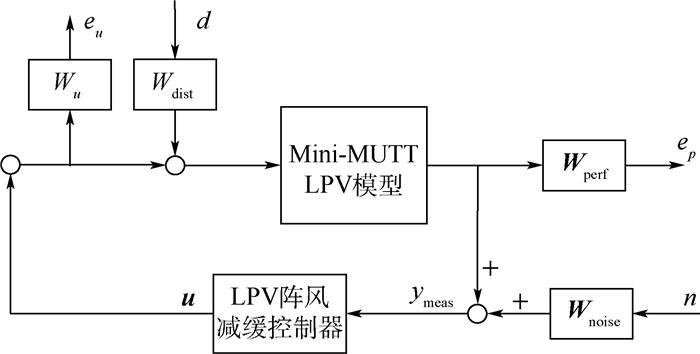
图 2 LPV阵风减缓控制器建模与计算流程
Figure 2. LPV gust alleviation controller modelling andcalculation process

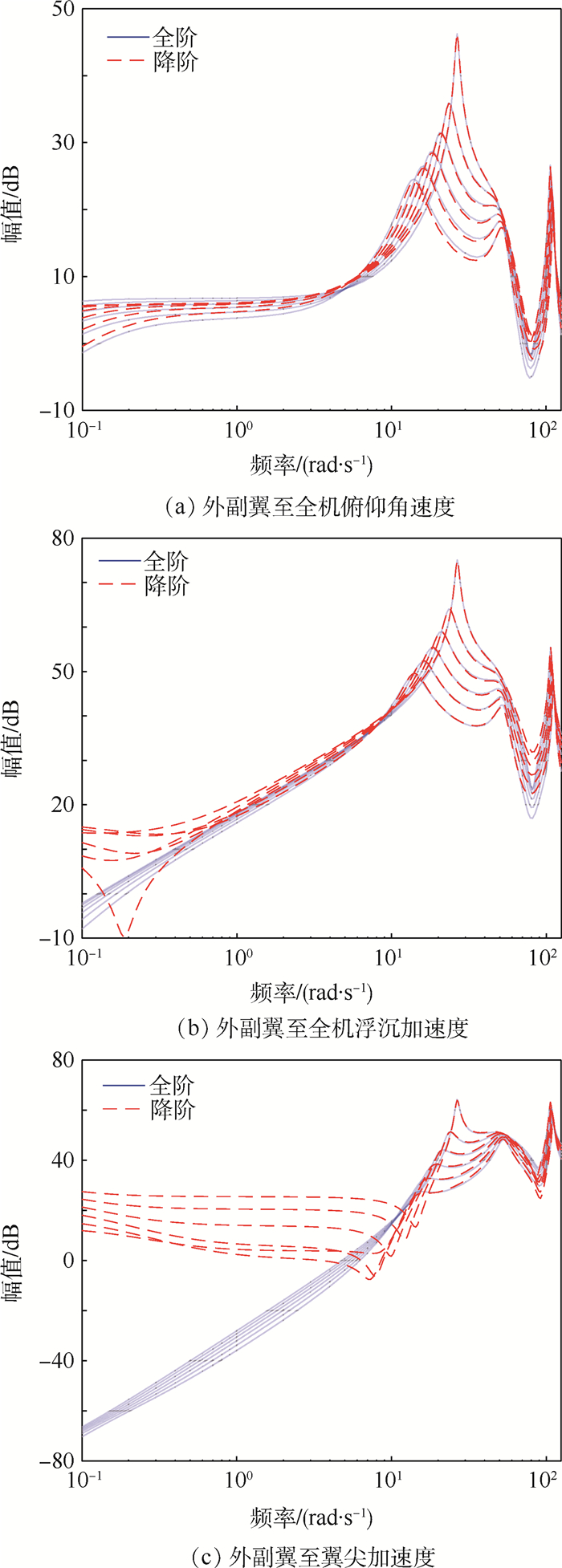
图 5 全阶模型和降阶模型的幅频特性对比
Figure 5. Comparison of amplitude-frequency characteristics between full-order and reduced-order model

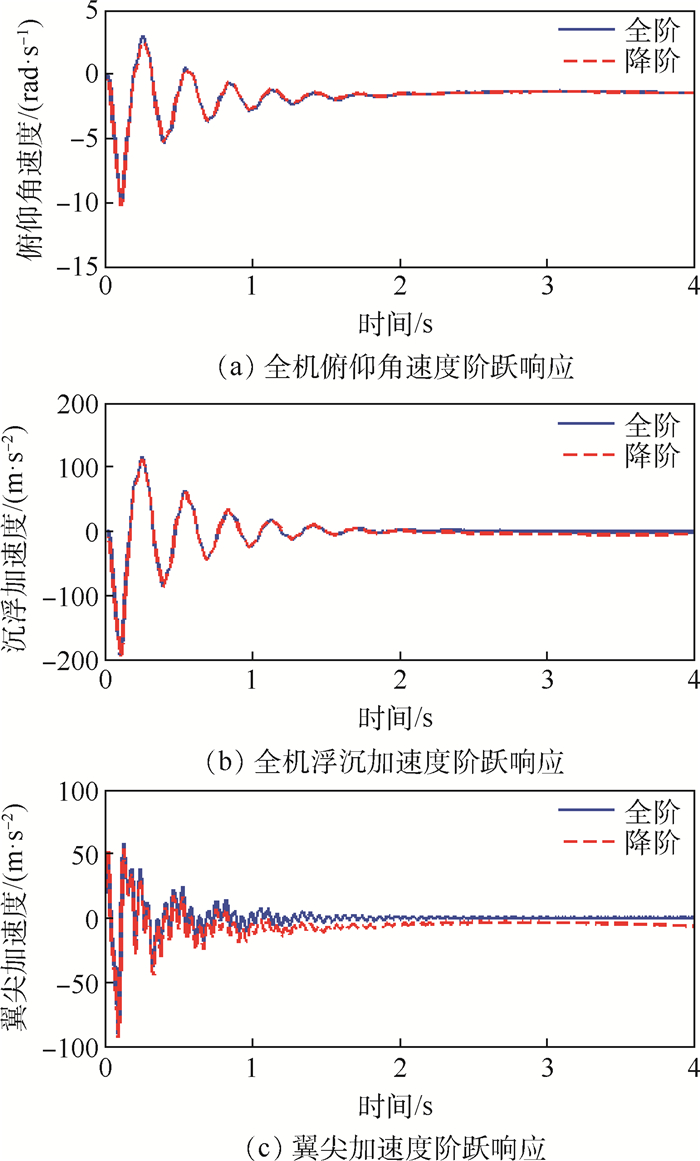
图 7 全阶模型和降阶模型的阶跃响应对比
Figure 7. Comparison of step response between full-order and reduced-order model

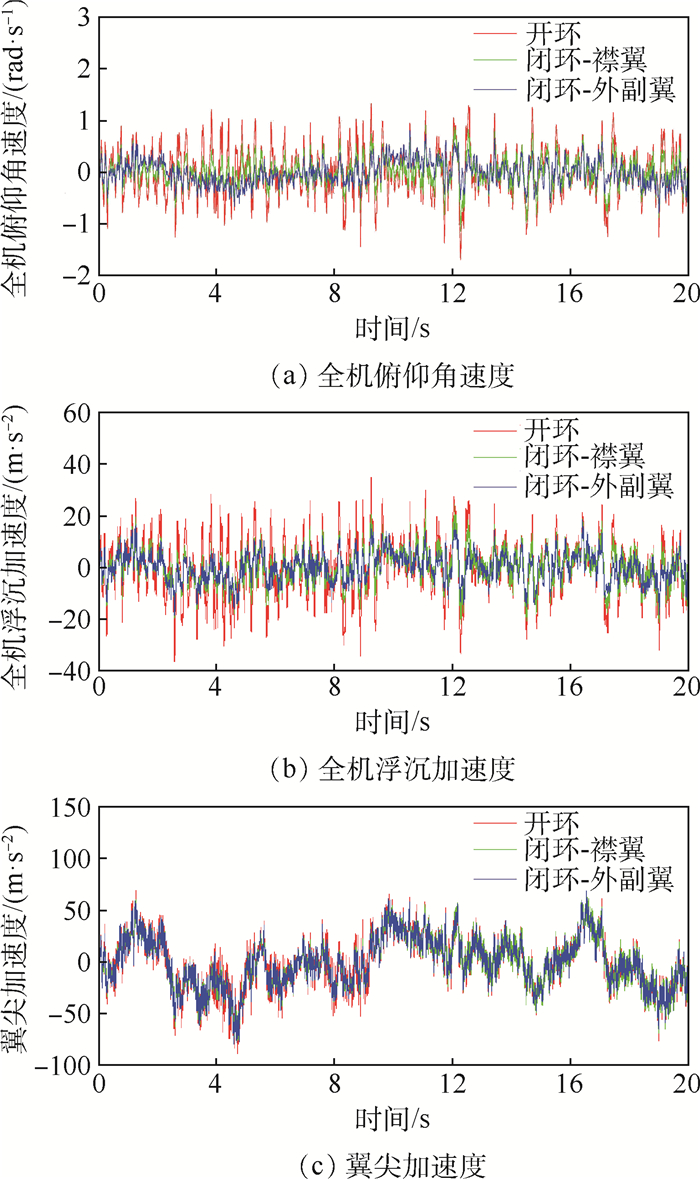
图 11 开环系统与闭环系统2种舵面输出响应对比
Figure 11. Comparison of output response for two kinds of control surface between open-loop and closed-loop system

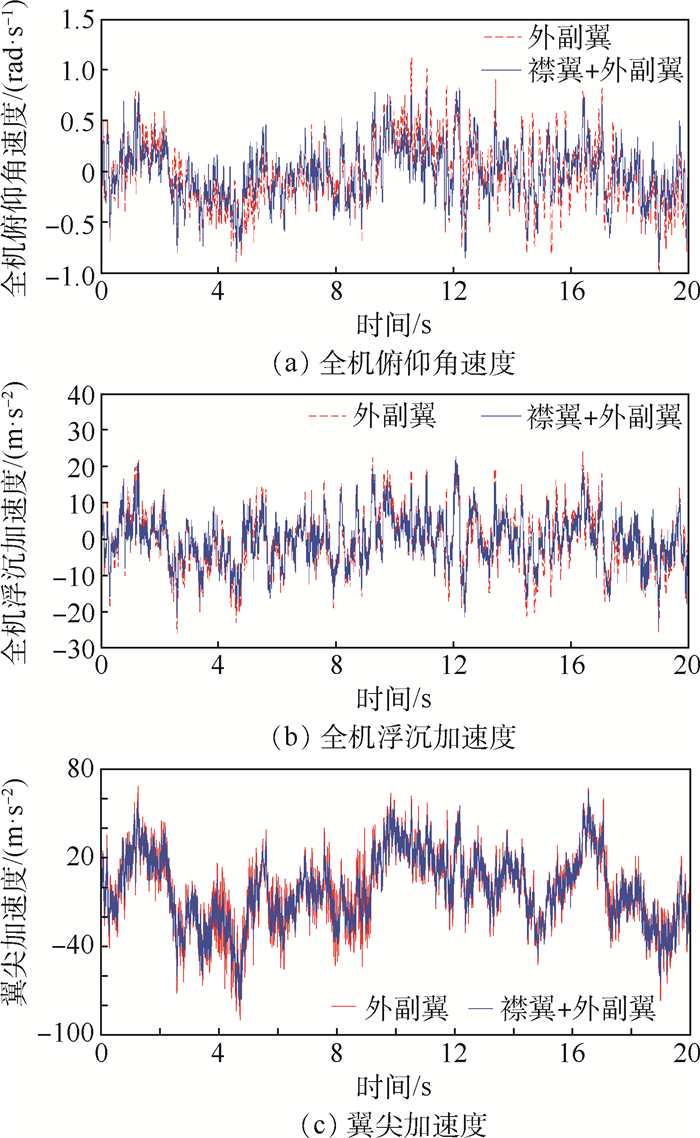
图 12 单舵面与双舵面控制输出响应对比
Figure 12. Comparison of output responses between single control surface and double control surfaces control

图 13 单舵面与双舵面控制输出响应功率谱对比
Figure 13. Comparison of power spertrum of output responses between single control surface and double control surfaces control

图 14 单舵面与双舵面控制输入对比
Figure 14. Comparison of input between single control surface and double control surfaces control
动力学参数 数值 刚体机身质量/kg 2.9877 刚体机身静矩Sx/(kg·m) 0.4270 刚体机身静矩Sz/(kg·m) 0 刚体机身惯量Iy/(kg·m2) 0.1994 机翼总质量/kg 2.397 2 机翼弯曲刚度EIz/(N·m2) 97.66 机翼扭转刚度GJx/(N·m2) 56.49 机翼单位长度质量μ/(kg·m-1) 0.60 机翼单位长度转动惯量Iwing/(kg·m) 0.0031 机翼半弦长b/m 0.14 机翼刚心无量纲距离a -0.0922 注:E和G分别为刚度系数和扭转系数;Iz和Jx分别为机翼截面绕z轴惯性矩和机翼截面绕x轴极惯性矩。  下载: 导出CSV
下载: 导出CSV
表 2 2种控制方式的幅值减缓率对比
Table 2. Comparison of amplitude reduction rate between two control strategies
控制方式 幅值减缓率/% 全机俯仰角速度 全机刚体浮沉加速度 翼尖加速度 外副翼 40.12 35.73 10.56 襟翼+外副翼 44.86 38.93 11.73
下载: 导出CSV
表 3 2种控制形式的能量减缓率对比
Table 3. Comparison of energy reduction rate between two control strategies
能量减缓率 能量减缓率/% 全机俯仰角速度 全机刚体浮沉加速度 翼尖加速度 外副翼 58.39 56.92 8.78 襟翼+外副翼 64.36 61.08 10.56
下载: 导出CSV
-
[1] SOHRAB H.Multidisciplinary design optimization of a highly flexible aeroservoelastic wing[D].Toronto: University of Toronto, 2012. [2] OLDS S D.Modeling and LQR control of two-dimensional airfoil[D].Blacksbur: Virginia Polytechnic Institute and State University, 1997. [3] BAIL T R.A disturbance-rejection problem for a 2-d airfoil[D].Blacksbur: Virginia Polytechnic Institute and State University, 1997. [4] BARKER J M, BALAS G J.Comparing linear parameter-varying gain-scheduled control techniques for active flutter suppression[J].Journal of Guidance, Control, and Dynamics, 2000, 23(5):948-955. doi: 10.2514/2.4637 [5] BALAS G J, CLAUDIA M, PETER J S.Robust aeroservoelastic control utilizing physics-based aerodynamic sensing[C]//AIAA Guidance, Navigation and Control Conference.Reston: AIAA, 2012: 4897-4907. [6] MCKENZIE J R.B-52 control configured vehicles ride control analysis and flight test: AIAA-1973-782[R].Reston: AIAA, 1973. [7] DISNEY T E.C-5A active load alleviation system[J].Journal of Spacecraft and Rockets, 1977, 14(2):81-86. doi: 10.2514/3.57164 [8] WINTHER B A, SHIRLEY W A, HEIMBAUGH R M.Windtunnel investigation of active control technology applied to a DC-10 deribative: AIAA-1980-0771[R].Reston: AIAA, 1980. [9] KARPEL M, MOULIN B, FELDGUN V.Active alleviation of gust loads using special control surfaces: AIAA-2006-1833[R].Reston: AIAA, 2006. [10] 许晓平, 周洲, 王军利.基于直接力控制的阵风响应及阵风减缓研究[J].空气动力学学报, 2012, 30(1):101-107. doi: 10.3969/j.issn.0258-1825.2012.01.018XU X P, ZHOU Z, WANG J L.Research on gust response and gust mitigation based on direct force control[J].Acta Aerodynamica Sinina, 2012, 30(1):101-107(in Chinese). doi: 10.3969/j.issn.0258-1825.2012.01.018 [11] 杨俊斌, 吴志刚, 戴玉婷, 等.飞翼布局飞机阵风减缓主动控制风洞试验[J].北京航空航天大学学报, 2017, 43(1):184-192. doi: 10.13700/j.bh.1001-5965.2016.0079YANG J B, WU Z G, DAI Y T, et al.Flying wing layout aircraft gust mitigation active control wind tunnel test[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(1):184-192(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0079 [12] 陈磊, 吴志刚, 杨超, 等.多控制面机翼阵风减缓主动控制与风洞试验验证[J].航空学报, 2009, 30(12):2250-2256. doi: 10.3321/j.issn:1000-6893.2009.12.002CHEN L, WU Z G, YANG C, et al.Active control and wind tunnel test verif ication of multi-control surfaces wing for gust alleviation[J].Acta Aeronautica et Astronautica Sinica, 2009, 30(12):2250-2256(in Chinese). doi: 10.3321/j.issn:1000-6893.2009.12.002 [13] EDWARD B, CHRIS A, JEFF B, et al.NDOF simulation model for flight control development with flight test correlation[C]//AIAA Modeling and Simulation Technologies Conference.Reston: AIAA, 2010: 7780-7794. [14] ABHINEET G, CLAUDIA P M, HARALD P, et al.Updating a finite element based structural model of a small flexible aircraft[C]//AIAA Modeling and Simulation Technologies Conference.Reston: AIAA, 2015: 1-14. [15] 孙智伟.高空长航时无人机多学科设计若干问题研究[D].西安: 西北工业大学, 2016.SUN Z W.Investigation of the problems in multidisciplinary design of high altitude long endurance unmanned aerial vehicle[D].Xi'an: Northwestern Polytechnical University, 2016(in Chinese). [16] ANDY P.Gain scheduling via linear fractional transformations[J].Systems and Control Letters, 1994, 22(2):79-92. doi: 10.1016/0167-6911(94)90102-3 [17] WU F.Control of linear parameter varying systems[D].Berkeley: University of California, 1995. [18] SUN X, POSTLETHWAITE I.Affine LPV modeling and its use in gain-scheduled helicopter control[C]//UKACC International Conference on Control.[S.l.]: Institution of Engineering and Technology, 1998: 1504-1509. [19] THEIS J, SEILER P, WERNER H.Model order reduction by parameter-varying oclique projection[C]//American Control Conference.Piscataway: IEEE Press, 2016: 4586-4591. [20] WU F, YANG X H, ANDY P, et al.Induced L2-norm control for LPV systems with bounded parameter variation rates[C]//American Control Conference.Piscataway: IEEE Press, 2002: 983-998. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 817
- HTML全文浏览量: 175
- PDF下载量: 162
- 被引次数: 0
