



-
摘要:
颤振是一种危险的气动弹性失稳形式,舵机动刚度对舵系统的颤振特性具有不可忽视的影响,因此舵机的精确建模与仿真分析十分有必要。针对此问题,提出了一种电动舵机模块化建模方法及动刚度计算机模拟方法。以“直流电机-减速齿轮-滚珠丝杠-拨叉副”典型结构的电动伺服舵机为对象,将其分解为具备核心功能的子模块,充分考虑了实际结构中可能出现的主要非线性因素,再根据子模块之间的连接关系来搭建整体的舵机模型。基于该舵机模型,提出了利用步进正弦扫频信号激励、最小二乘法数据处理得到动刚度的计算方法,并以某舵机为算例,开展了舵机主要线性参数及非线性因素对舵机动刚度影响的研究。电动舵机模块化建模方法通用性好,便于不同舵机的拓展。电机转子阻尼、减速器的传动比以及输出轴处的阻尼对舵机的动刚度影响很大,间隙、接触刚度和摩擦这3类非线性因素对舵机的动刚度特性也具有重要的影响。
Abstract:Flutter is a dangerous aeroelastic instability form. The influence of actuator dynamic stiffness on the fin-actuator system flutter characteristics cannot be ignored. Therefore, accurate actuator modeling and simulation are necessary. A modular modeling method and dynamic stiffness computer simulation method for electromechanical actuator are proposed. The object is the actuator composed of DC motor, reduction gear and ball screw-fork. It is divided into submodules with core functions. The main nonlinear factors that may appear are fully considered. Then the whole actuator model is built according to the connection between the submodules. Based on the above, a calculation method using step sine sweep signal as excitation and processing the data by least square method is proposed. Taking a certain actuator as an example, the influence of the actuator main linear and nonlinear parameters on the dynamic stiffness is studied. The modular modeling method has good generality, which is convenient for the modeling of different actuators. The damping of the motor rotor, the transmission ratio of the reducer and the damping at the output shaft have a great influence on the dynamic stiffness, and three nonlinear factors, clearance, contact stiffness and friction, also have important influence.
-
Key words:
- electromechanical actuator /
- modeling /
- dynamic stiffness /
- aeroservoelasticity /
- nonlinearity
-

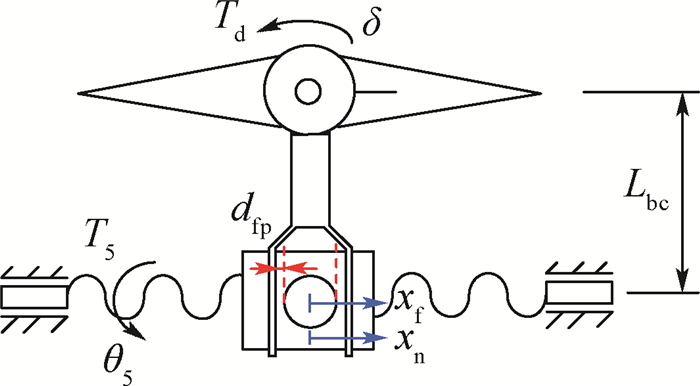
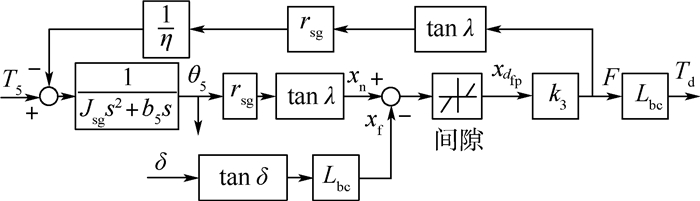
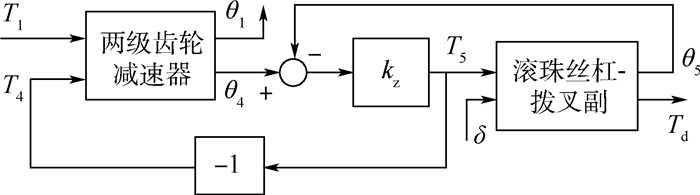
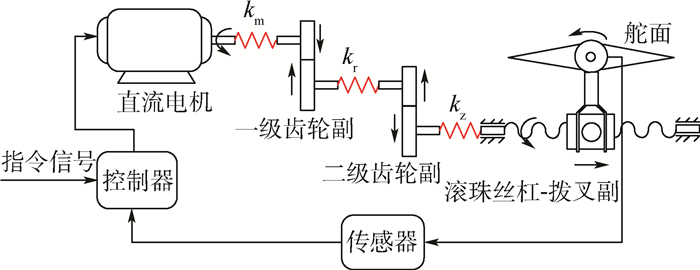
图 14 减速器与传动机构子模块简图
Figure 14. Simplified diagram of reducer and transmissionmechanism submodule

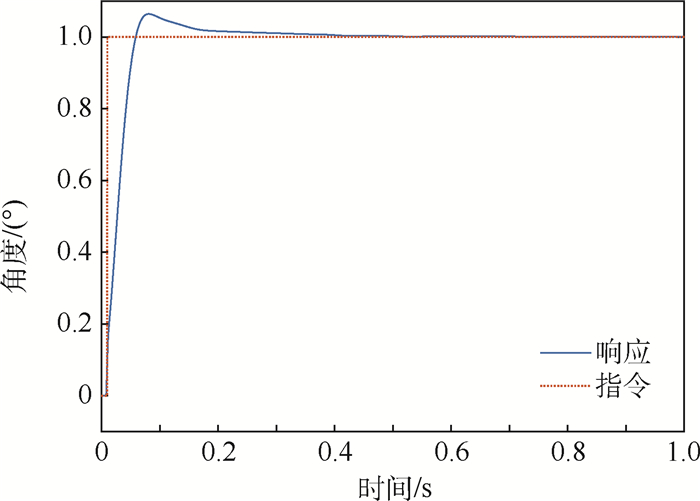
图 22 舵机模型指令信号与响应对比
Figure 22. Comparison of command signal and response of actuator model

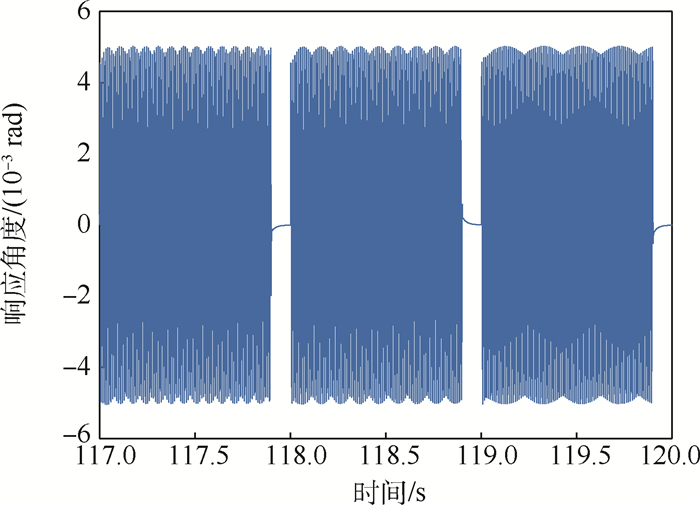
图 24 线性航机输出轴的响应(43~44.5 Hz)
Figure 24. Response of linear actuator output shaft (43~44.5 Hz)

图 26 线性航机输出轴的响应(98~99.5 Hz)
Figure 26. Response of linear actuator output shaft (98~99.5 Hz)

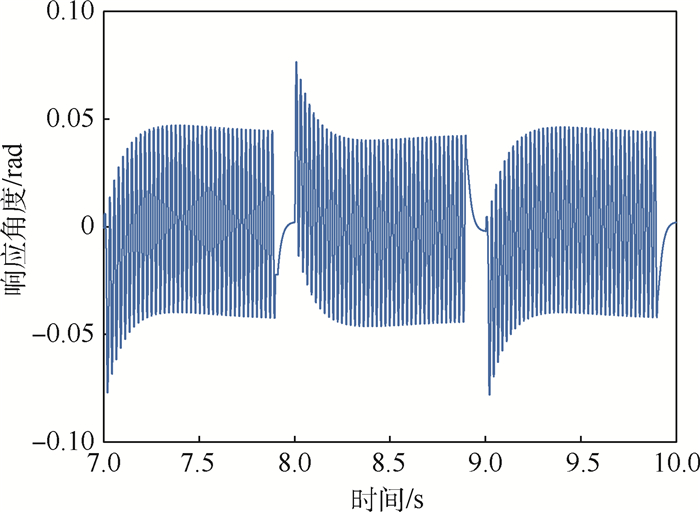
图 28 非线性舵机输出轴的响应(43~44.5 Hz)
Figure 28. Response of nonlinear actuator outputshaft (43~44.5 Hz)

图 29 非线性舵机输出轴的响应(98~99.5 Hz)
Figure 29. Response of nonlinear actuator outputshaft (98~99.5 Hz)

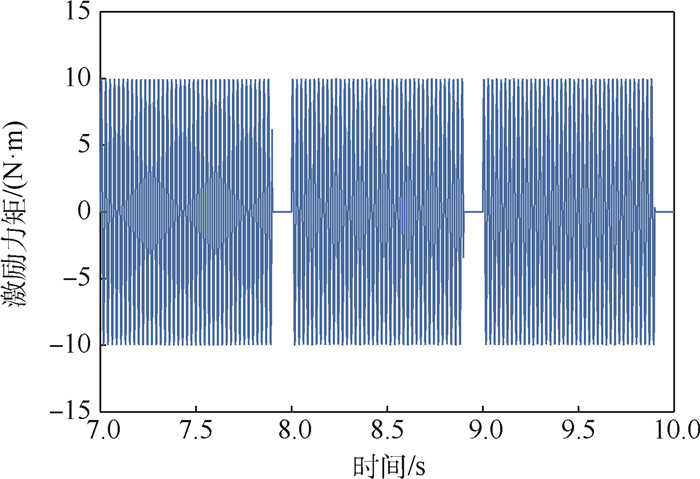
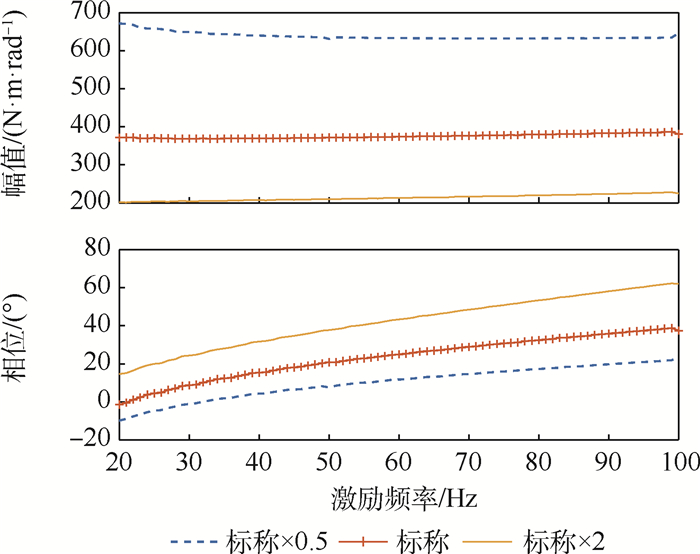
图 38 舵机仅包含间隙时激励幅值对动刚度的影响
Figure 38. Influence of excitation amplitude on dynamic stiffness of outuator with freeplay only

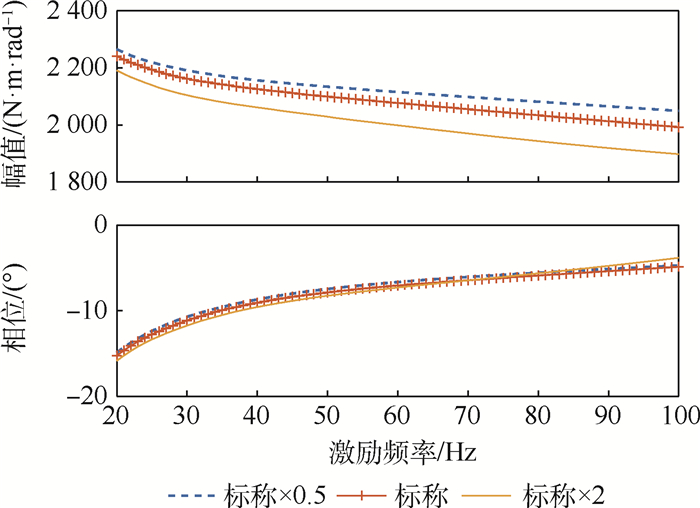
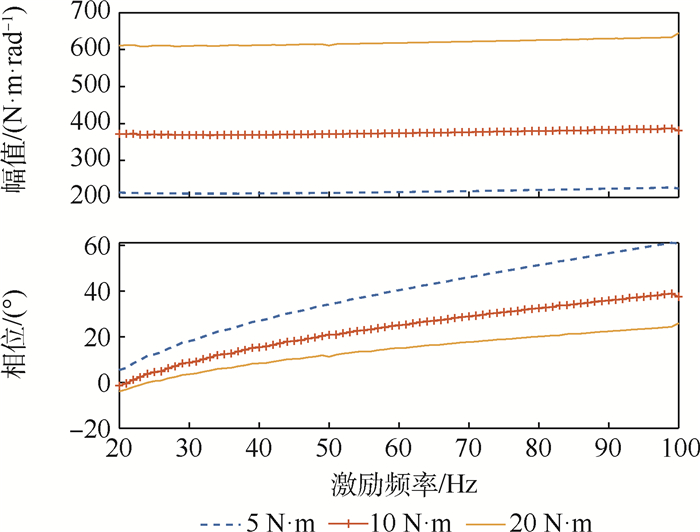
图 45 舵机仅包含摩擦时激励幅值对动刚度的影响
Figure 45. Influence of excitation amplitude on dynamic stiffness of outuator with friction only
参数 数值 电感L/mH 6.53×10-4 电阻R/Ω 1.1 力矩系数Km/(N·m·A-1) 0.024 反电动势系数Ce/(V·s·rad-1) 0.034 电机转子转动惯量Jm/(kg·m2) 1.09×10-6 电机转子黏性阻尼系数bm 0.003 电机与减速器连接刚度km/(N·m·rad-1) 1 000 小齿轮转动惯量J1/(kg·m2) 2.4×10-8 大齿轮转动惯量J2/(kg·m2) 4×10-6 小齿轮半径r1/m 0.005 大齿轮半径r2/m 0.022 5 齿轮啮合刚度kg/(kg·s2·rad-1) 108 齿轮与传动机构连接刚度kz/(N·m·rad-1) 1 000 滚珠丝杠转动惯量Jsg/(kg·m2) 1.12×10-5 滚珠丝杠螺旋角λ/(°) 6.06 滚珠丝杠半径rsg/m 0.006 滚珠丝杠效率η 0.85 拨叉长度Lbc/m 0.028 5 输出轴转动惯量Jshaft/(kg·m2) 4.1×10-5 接触刚度Kjc 6×10-6 间隙半宽度dfp/rad 0.000 5 库伦摩擦参数Fc/N 1 静摩擦系数Fs/N 1.5 动态摩擦参数σ0/(N·s·m-1) 105 切换速度Vs/(m·s-1) 0.001 动态摩擦参数σ1/(N·s·m-1) 316.23 黏性阻尼参数σ2/(N·s·m-1) 0.4  下载: 导出CSV
下载: 导出CSV
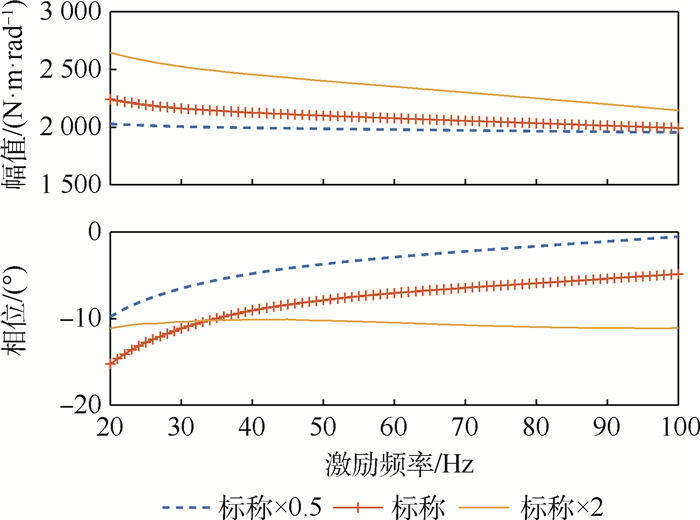
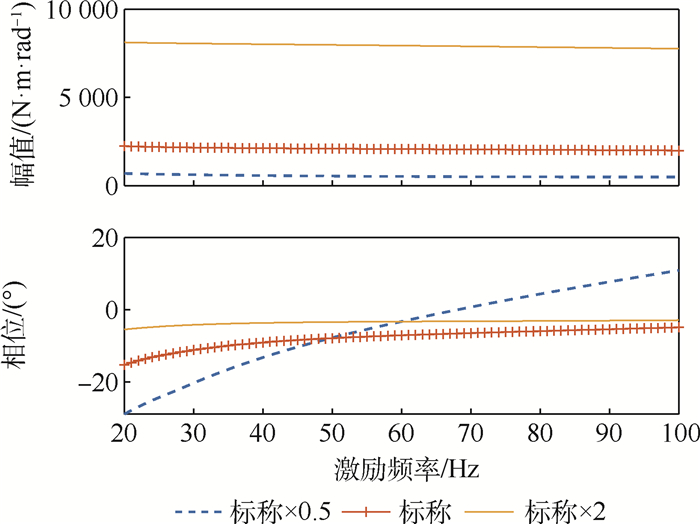
表 2 舵机参数对动刚度的影响
Table 2. Influence of actuator parameters on dynamic stiffness
参数 影响程度 幅值关系 相位关系 线圈电感 小 ↓ — 电阻 小 ↑ — 力矩系数 大 — — 反电动势系数 很小 — — 电机转子转动惯量 大 ↓ ↓ 电机转子黏性阻尼系数 大 ↓ ↑ 小齿轮转动惯量 很小 — — 大齿轮转动惯量 很小 — — 小齿轮半径 大 ↑ ↑ 大齿轮半径 大 ↓ ↓ 齿轮啮合刚度 很小 — — 齿轮与传动机构连接刚度 很小 ↑ — 滚珠丝杠转动惯量 小 ↓ ↓ 滚珠丝杠半径 大 ↑ ↑ 滚珠丝杠效率 大 ↓ ↓ 拨叉长度 很大 ↑ ↓ 输出轴滚珠惯量 小 ↓ ↑ 输出轴阻尼 很大 ↑ ↑
下载: 导出CSV
-
[1] LYSHEVSKI S E. Electromechanical flight actuators for advanced flight vehicles[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(2): 511-518. doi: 10.1109/7.766933 [2] 郭雪梅, 贾宏光, 冯长有. 直流无刷电机位置跟踪的模糊PID控制[J]. 长春理工大学学报(自然科学版), 2008, 31(1): 99-103. https://www.cnki.com.cn/Article/CJFDTOTAL-CGJM200801029.htmGUO X M, JIA H G, FENG C Y. Fuzzy PID control of brushless DC motor position tracking[J]. Journal of Changchun University of Science and Technology(Natural Science Edition), 2008, 31(1): 99-103(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-CGJM200801029.htm [3] 钟晓伟, 宋蛰存, 姜忠. 模糊PID控制器在无刷直流电机控制系统中的应用[J]. 化工自动化及仪表, 2010, 37(8): 87-89. https://www.cnki.com.cn/Article/CJFDTOTAL-HGZD201008023.htmZHONG X W, SONG Z C, JIANG Z. Application of fuzzy PID controller for BLDCM control system[J]. Control and Instruments in Chemical Industry, 2010, 37(8): 87-89(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HGZD201008023.htm [4] 张新榃, 吴志刚, 杨超. 考虑舵机动力学的舵系统颤振特性分析[J]. 北京航空航天大学学报, 2011, 37(8): 927-932. https://bhxb.buaa.edu.cn/CN/abstract/abstract12035.shtmlZHANG X T, WU Z G, YANG C. Flutter analysis for rudder considering actuator's dynamics[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(8): 927-932(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12035.shtml [5] KIM S H, TAHK M J. Dynamic stiffness transfer function of an electromechanical actuator using system identification[J]. International Journal of Aeronautical and Space Sciences, 2018, 19(1): 208-216. doi: 10.1007/s42405-018-0005-7 [6] ZHANG R, WU Z, YANG C. Dynamic stiffness testing-based flutter analysis of a fin with an actuator[J]. Chinese Journal of Aeronautics, 2015, 28(5): 1400-1407. doi: 10.1016/j.cja.2015.08.016 [7] WANG Y, MEGLI T, HAGHGOOIE M, et al. Modeling and control of electromechanical valve actuator: 2002-01-1106[R]. Michigan: SAE, 2002. [8] 刘敏, 刘藻珍, 王金柱. 某型电动舵机建模与仿真研究[J]. 弹箭与制导学报, 2004, 24(3): 123-125. https://www.cnki.com.cn/Article/CJFDTOTAL-DJZD2004S5009.htmLIU M, LIU Z Z, WANG J Z. Modeling and simulation researeh of a electromechanical actuator[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2004, 24(3): 123-125(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DJZD2004S5009.htm [9] 张奎轩, 曾庆华. 面向故障仿真的舵机系统建模方法研究[J]. 航空计算技术, 2015, 45(3): 95-98. https://www.cnki.com.cn/Article/CJFDTOTAL-HKJJ201503024.htmZHANG K X, ZENG Q H. Research on circuit simulation method for actuator system[J]. Aeronautical Computing Technique, 2015, 45(3): 95-98(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKJJ201503024.htm [10] 张开敏, 邓瑞清. 舵机传动机构动力学建模与分析[J]. 航空兵器, 2012(4): 34-37. https://www.cnki.com.cn/Article/CJFDTOTAL-HKBQ201204010.htmZHANG K M, DENG R Q. Dynamical modeling and analysis of actuator transmission system[J]. Aero Weaponry, 2012(4): 34-37(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKBQ201204010.htm [11] 黎海青, 郭百巍, 徐红. 基于ADAMS与SIMULINK的舵机虚拟样机建模和仿真[J]. 系统仿真学报, 2009, 21(21): 6886-6888. https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200921050.htmLI H Q, QUO B W, XU H. Virtual prototype modeling and simulation analysis of servo based on ADAMS and SIMULINK[J]. Journal of System Simulation, 2009, 21(21): 6886-6888(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTFZ200921050.htm [12] BEIER T. Prediction and measurement of the dynamic stiffness and damping of hydraulic servo-actuators[C]//18th Structural Dynamics and Materials Conference. Reston: AIAA, 1977: 107-116. [13] BLAIGNAN V B, SKORMIN V A. Stiffness enhancement of flight control actuator[J]. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(2): 380-390. http://ieeexplore.ieee.org/xpl/articleDetails.jsp?arnumber=210076 [14] THOMPSON D F, PRUYN J S, SHUKLA A. Feedback design for robust tracking and robust stiffness in flight control actuators using a modified QFT technique[J]. International Journal of Control, 1999, 72(16): 1480-1497. doi: 10.1080/002071799220128 [15] BALLESTEROS H M S, DAS NEVES CALVO R, ADADE FILHO A. Dynamic stiffness enhancement of a flight control actuator using control techniques[C]//2017 IEEE International Conference on Mechatronics. Piscataway: IEEE Press, 2017: 260-265. [16] SHIN W H, LEE I, SHIN Y S, et al. Nonlinear aeroelastic analysis for a control fin with an actuator[J]. Journal of Aircraft, 2007, 44(2): 597-605. http://www.zhangqiaokeyan.com/academic-journal-foreign_other_thesis/0204110960008.html [17] 张仁嘉, 吴志刚, 杨超. 电动伺服舵系统动力学建模及颤振分析[J]. 北京航空航天大学学报, 2016, 42(7): 1368-1376. doi: 10.13700/j.bh.1001-5965.2015.0448ZHANG R J, WU Z G, YANG C. Dynamic modeling and flutter analysis of a fin-actuator system[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(7): 1368-1376(in Chinese). doi: 10.13700/j.bh.1001-5965.2015.0448 [18] CROKE S, HERRENSCHMIDT J. More electric initiative-power-by-wire actuation alternatives[C]//Proceedings of the National Aerospace and Electronics Conference. Piscataway: IEEE Press, 1994: 1338-1346. [19] XIAO H, BRENNAN M J, SHAO Y. On the undamped free vibration of a mass interacting with a Hertzian contact stiffness[J]. Mechanics Research Communications, 2011, 38(8): 560-564. http://www.sciencedirect.com/science/article/pii/S0093641311001704 [20] 杨珍书. 飞控机电作动系统非线性建模和故障分析[D]. 天津: 中国民航大学, 2018: 33-34.YANG Z S. Nonlinear modeling and fault analysis of flight control electromechanical actuation system[D]. Tianjin: Civil Aviation University of China, 2018: 33-34(in Chinese). [21] 周金柱, 段宝岩, 黄进. LuGre摩擦模型对伺服系统的影响与补偿[J]. 控制理论与应用, 2008, 25(6): 990-994. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200806003.htmZHOU J Z, DUAN B Y, HUANG J. Effect and compensation for servo systems using LuGre friction model[J]. Control Theory & Applications, 2008, 25(6): 990-994(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY200806003.htm [22] CANUDAS D W C, OLSSON H, ASTROM K J, et al. A new model for control of systems with friction[J]. IEEE Transactions on Automatic Control, 1995, 40(3): 419-425. [23] 张仁嘉. 飞行器气动伺服弹性若干关键问题研究[D]. 北京: 北京航空航天大学, 2015: 33-34.ZHANG R J. Extensional research on several critical aeroservoelastic problems of air vehicles[D]. Beijing: Beihang University, 2015: 33-34(in Chinese). -

 下载:
下载:


























 点击查看大图
点击查看大图
计量
- 文章访问数: 808
- HTML全文浏览量: 311
- PDF下载量: 203
- 被引次数: 0
