



Trajectory tracking control and optimal computation of attraction domain for aircraft in perching maneuvers
-
摘要:
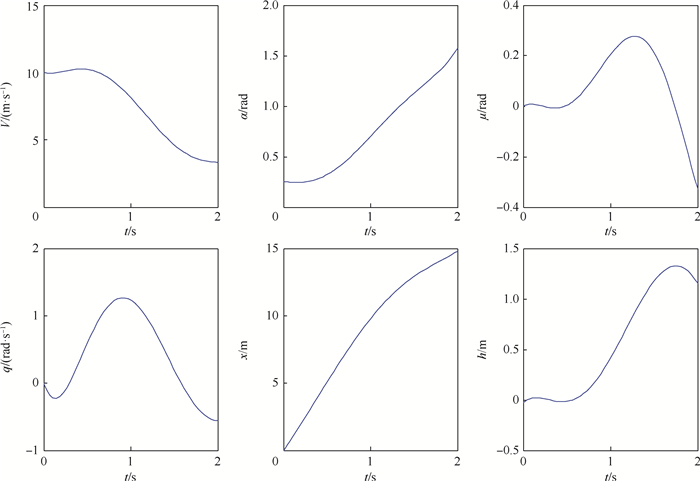
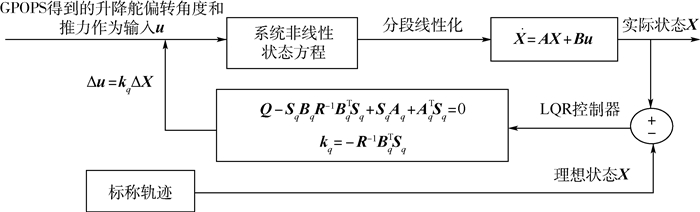
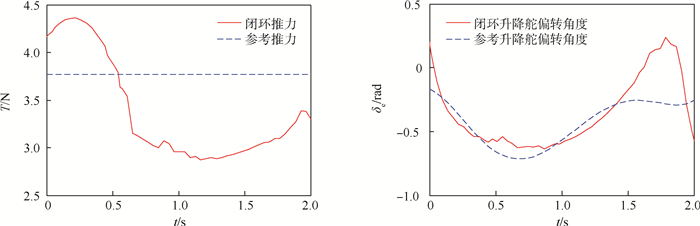
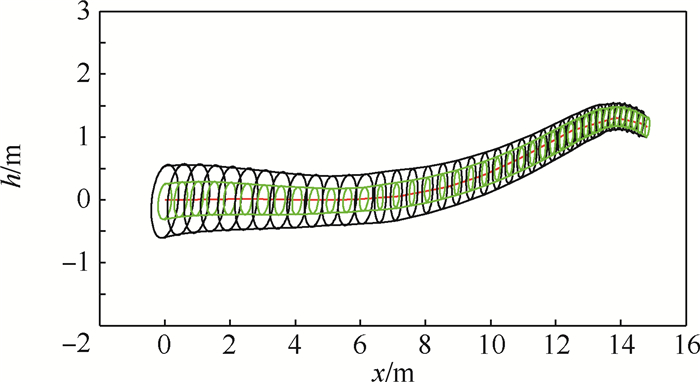
针对固定翼飞行器栖落机动的纵向运动,研究了栖落机动轨迹跟踪控制设计与吸引域优化计算方法。首先,根据栖落动力学模型和栖落过程中各个状态量的约束,用广义伪谱法生成标称轨迹,以此为基础设计了分段线性轨迹跟踪控制律。然后,在平方和(SOS)算法的基础上计算出栖落轨迹的吸引域,以保证吸引域内的飞行器能最终栖落在目标区域。最后,进一步改进吸引域的迭代优化计算方法以扩大吸引域范围。仿真结果验证了栖落机动轨迹跟踪控制律的有效性,并表明运用所设计的吸引域优化计算方法可以获得更大的吸引域。
-
关键词:
- 轨迹跟踪控制 /
- 广义伪谱法 /
- 吸引域 /
- 栖落机动 /
- 平方和(SOS)算法
Abstract:For the longitudinal movement of fixed-wing aircraft in perching maneuvers, the perching trajectory control design and the optimization method of attraction domains are investigated. First, according to the perching dynamics model and the constraints of states during the perching, the nominal trajectory was generated by using the general pseudo-spectral method. Then, based on this, a piecewise linear trajectory tracking control law was designed. Based on the Sum-of-Squares (SOS) method, the attraction domain of the trajectory control system is calculated to ensure that the UAV in the attraction domain can ultimately perch in the target area. Finally, the iterative computation algorithm of the attraction domain is further improved to expand the scope of the attraction domain. The simulation results verify the effectiveness of the trajectory tracking control law of the perching maneuver, and show that the attraction domain is enlarged by using the proposed computation algorithm of attraction domain.
-
表 1 状态变量过程约束
Table 1. Process constraints of state variables
状态变量 下限值 上限值 V/(m·s-1) 0 25 α/rad -π/2 π/2 μ/rad -π/4 π/4 q/(rad·s-1) -3.5 3.5 x/m 0 15 h/m 0 10 δe/rad -π/3 π/3  下载: 导出CSV
下载: 导出CSV
表 2 飞行器物理参数
Table 2. Physical parameters of UAV
参数 数值 质量m/kg 0.8 平均气动弦长c/m 0.25 展长b/m 1 升力面积Sl/m2 0.25 俯仰转动惯量Iy/(kg·m-2) 0.1
下载: 导出CSV
-
[1] POPE M, TKIMES C W, JIANG H, et al. A multimodal robot for perching and climbing on vertical outdoor surfaces[J]. IEEE Transactions on Robotics, 2017, 33(1): 38-48. doi: 10.1109/TRO.2016.2623346 [2] FEROSKHAN M, TIAUW H. Control strategy of sideslip perching maneuver under dynamic stall influence[J]. Aerospace Science and Technology, 2018, 72: 150-163. doi: 10.1016/j.ast.2017.11.002 [3] COLIN G, ANTONY W, THOMS R. Perched landing manoeuvres with a variable sweep wing UAV[J]. Aerospace Science and Technology, 2017, 71: 510-520. doi: 10.1016/j.ast.2017.09.034 [4] CORY R, TEDRAKE R.Experiments in fixedwing UAV perching[C]//Proceedings of the 33th Chinese Control Conference, 2014: 2047-2056. [5] 袁亮, 何真, 王月. 变体无人机栖落机动建模与轨迹优化[J]. 南京航空航天大学学报, 2018, 50(2): 267-275.YUAN L, HE Z, WANG Y. Modeling and trajectory optimization of perching maneuvers for morphing UAV[J]. Journal of Nanjing University of Aeronautics & Astronautics, 2018, 50(2): 267-275(in Chinese). [6] ROBEST J W, CORY R, TEDRAKE R.On the controlability of fixedwing perching[C]//American Control Conference, 2009: 2018-2023. [7] VENKAESWARA R, TIAUW H. Optimization stability analysis and trajectory tracking of perching maneuvers[J]. Journal of Guidance, Control, and Dynamics, 2014, 37(7): 879-888. doi: 10.2514/1.60787 [8] MIR F, TIAUW H G. Performance of sideslip perching maneuver with an adaptive gain control feature[J]. Aerospace Science and Technology, 2018, 78: 648-660. doi: 10.1016/j.ast.2018.05.026 [9] MIHIR V, SHAWN K, GONZALO G, et al.Fixed wing aircraft perching[C]//AIAA Guidance Navigation and Control Conference.Reston: AIAA, 2017: 14-34. [10] MARK M, IAN R, RUSS T.Invariant funnels around trajectories using sum-of-squares programming[C]//The International Federation of Automatic Control, 2014: 9218-9223. [11] TEDRAKE R, MANCHESTE I R, TOBENKIN M, et al. LQR trees: Feedback motion planning via sums-of-square verification[J]. International Journal of Robotics Research, 2010, 29(8): 1025-1038. doi: 10.1177/0278364910369189 [12] PUPPOLO M, REYNOLDS R, JACOB J.Comparison of three aerodynamic model used in simulation of high angle of attack UAV perching maneuver[C]//Proceedings of the AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition.Reston: AIAA, 2006: 1291-1302. [13] TAHK M J, HAN S, LEE B Y, et al.Trajectory optimization and control algorithm of longitudinal perch landing assisted by thruster[C]//Proceedings of the IEEE Control Conference.Piscataway: IEEE Press, 2017: 2247-2252. [14] 李达. 飞行器栖落机动飞行轨迹优化与控制[D]. 南京: 南京航空航天大学, 2017.LI D.Trajectory optimization and control of perching maneuvers for aircraft[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2017(in Chinese). [15] KAUSHIK H, MOHAN R, PRAKASH K A. Utilization of wind shear for powering unmanned aerial vehicles in surveillance application: A numerical optimization study[J]. Energy Procedia, 2016, 90: 349-359. doi: 10.1016/j.egypro.2016.11.202 [16] RAO A V, BENSON D A, DQRBY C, et al. Algorithm 902: GPOPS, a MATLAB software for solving multiple phase optimal control problems using the Gauss pseudospectral method[J]. ACM Transactions on Mathematical Software, 2010, 37(2): 163-172. http://dl.acm.org/citation.cfm?id=1731032 [17] BARAK B, KENLNER J, STEURER D.Dictionary learning and tensor decomposition via the sum-of-squares method[C]//Forty-Seventh ACM Symposium on Theory of Computing, 2015: 143-151. [18] ZHOU Y, KUANG C, SUN Y.Nonlinear H-infinity control for spacecraft attitude maneuver based on SOS optimization[C]//13th International Conference on Computer Science & Education, 2018: 46-51. [19] 隋吉超, 罗飞. 基于平方和规划法的一种估计系统吸引域的改进算法[J]. 科学技术与工程, 2012, 12(5): 978-980. doi: 10.3969/j.issn.1671-1815.2012.05.002SUI J C, LUO F. An improved algorithm for estimating the domain of attraction of a system based on the square sum programming[J]. Science Technology and Engineering, 2012, 12(5): 978-980(in Chinese). doi: 10.3969/j.issn.1671-1815.2012.05.002 [20] RADIAN F, YINGJEN C, MOTOYASU T. An SOS based control Lyapunov function design for polynomial fuzzy control of nonlinear systems[J]. IEEE Transactions on Fuzzy Systems, 2017, 25(4): 775-787. doi: 10.1109/TFUZZ.2016.2578339 [21] 李瑞莲. 一类非线性切换系统的吸引域估计及控制器设计[D]. 沈阳: 东北大学, 2009.LI R L.Domain of attraction estimation and control for a class of nonlinear switched systems[D].Shenyang: Northeastern University, 2009(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 1010
- HTML全文浏览量: 52
- PDF下载量: 85
- 被引次数: 0
