



Design and realization of an improved active disturbance rejection quadrotor UAV control system
-
摘要:
针对提高四旋翼无人机姿态控制抗干扰能力的目标,设计了一种内外环嵌套结构的改进型自抗扰控制(ADRC)器。根据所搭建四旋翼无人机的实际参数,构建了四旋翼无人机姿态控制系统的数值仿真模型。通过与传统双闭环PID控制器进行对比,证明所设计的自抗扰控制系统在快速响应、无超调的前提下,具有很强的抗干扰能力以及较高的控制效率。将所设计的控制系统,应用于四旋翼无人机之上,在具有大偏载以及方向不确定的强干扰的飞行试验中,取得了良好的控制效果。
-
关键词:
- 四旋翼无人机 /
- 自抗扰控制(ADRC) /
- 干扰补偿 /
- 滑动平均低通滤波 /
- 内外环嵌套结构
Abstract:In order to improve the ability of disturbance rejection of quadrotor UAV attitude control, this paper presents an improved Active Disturbance Rejection Controller (ADRC) with nested structure of inner and outer loops. The numerical simulation model of quadrotor UAV attitude control system is constructed with parameters measured from an actual prototype. By comparing to traditional double closed-loop PID controller, it is shown that the improved ADRC has very strong ability of disturbance rejection and high control efficiency, with quick response and no overshoot. The quadrotor UAV has excellent control effect during flight test with big partial load and strong disturbance from unknown directions, using the same control algorithm as in simulation.
-

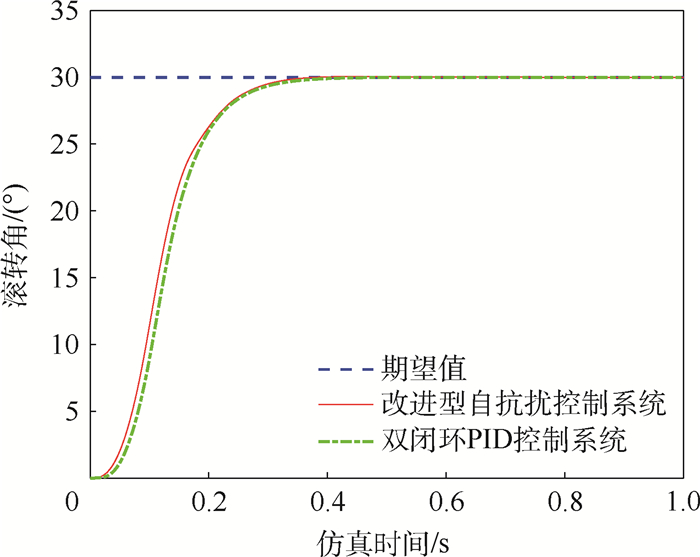
图 4 滚转通道无干扰时的阶跃响应对比
Figure 4. Comparison of step response of roll angle path under no disturbance

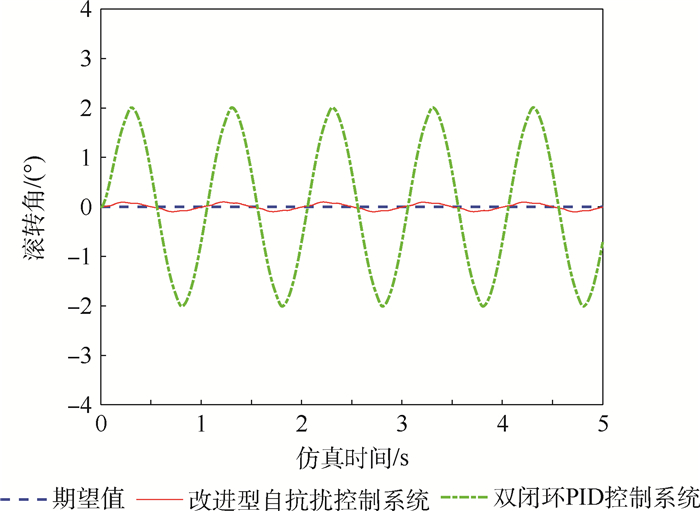
图 5 滚转通道正弦波干扰下的响应对比
Figure 5. Comparison of response of roll angle path under sine wave disturbance

图 6 滚转通道方波干扰下的响应对比
Figure 6. Comparison of response of roll angle path under square wave disturbance

图 7 滚转通道极限幅值方波干扰下的响应对比
Figure 7. Comparison of response of roll angle path under square wave disturbance of maximum amplitude

图 8 偏航通道无干扰时的阶跃响应对比
Figure 8. Comparison of step response of yaw angle path under no disturbance

图 9 偏航通道正弦波干扰下的响应对比
Figure 9. Comparison of response of yaw angle path under sine wave disturbance

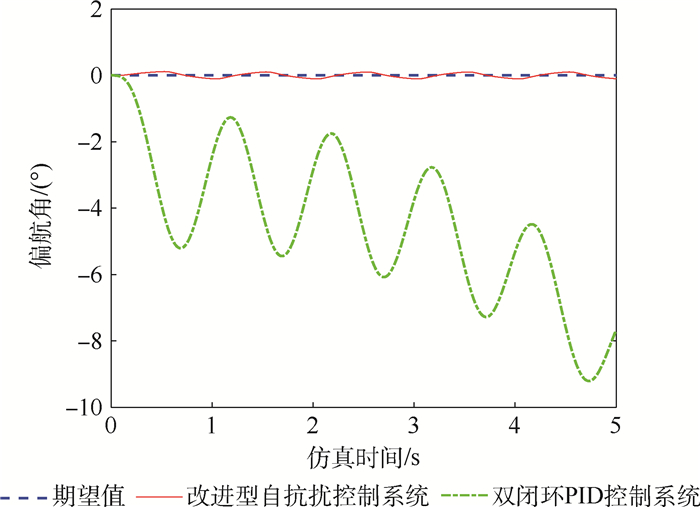
图 10 偏航通道方波干扰下的响应对比
Figure 10. Comparison of response of yaw angle path under square wave disturbance

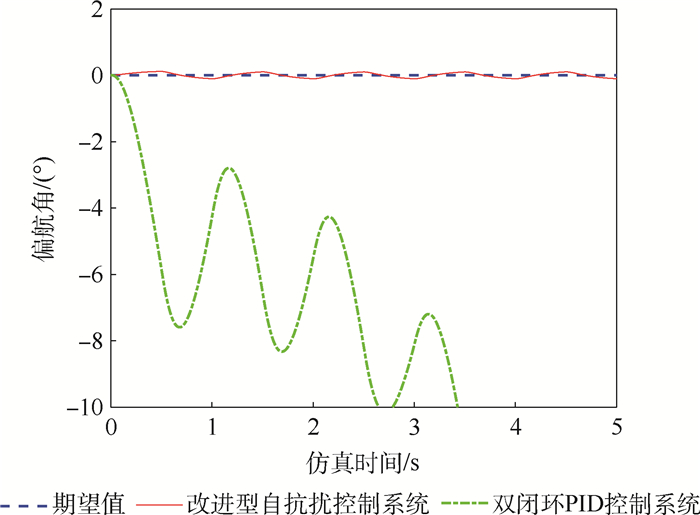
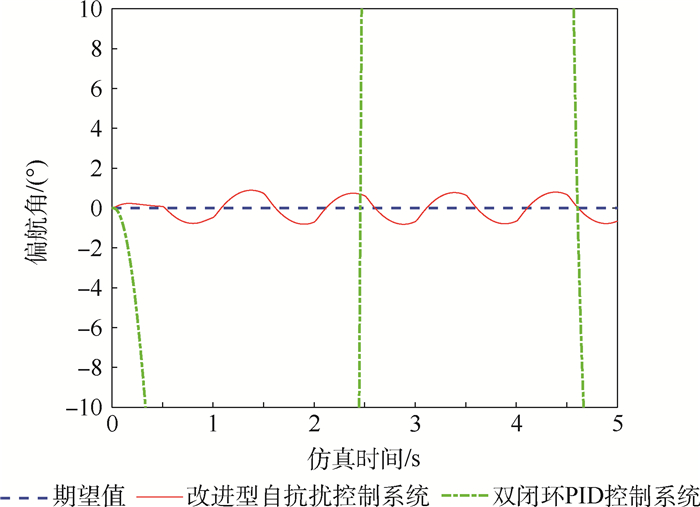
图 11 偏航通道极限幅值方波干扰下的响应对比
Figure 11. Comparison of response of yaw angle path under square wave disturbance of maximum amplitude
表 1 四旋翼无人机模型参数
Table 1. Parameters of quadrotor UAV model
参数 数值 总质量m/kg 1.311 臂长d/m 0.24 沿x轴转动惯量Ix/(kg·m2) 1.762×10-2 沿y轴转动惯量Iy/(kg·m2) 1.796×10-2 沿y轴转动惯量Iz/(kg·m2) 2.805×10-2 升力系数CT/(N·s2·rad-2) 9.138×10-6 反扭矩系数CM/(N·m·s2·rad-2) 1.368×10-7 电机时间常数Tm/s 0.015 7  下载: 导出CSV
下载: 导出CSV
表 2 滚转角/俯仰角控制器参数
Table 2. Parameters of roll/pitch angle controller
参数 数值 α 0.5 δtd 0.2 k0 8 h 0.001 r0 600 h0 0.004 b0 58.37 k1 0.5 k2 0.05 δeso 0.005 β1 1 000 β2 60 000
下载: 导出CSV
表 3 偏航角控制器参数
Table 3. Parameters of yaw angle controller
参数 数值 α 0.5 δtd 0.2 k0 3 h 0.001 r0 600 h0 0.002 b0 3.6 k1 5 k2 0.35 δeso 0.005 β1 1 000 β2 60 000
下载: 导出CSV
-
[1] 陈志明, 牛康, 李磊, 等. 基于BSP-ANN的四旋翼无人机轨迹跟踪方法[J]. 航空学报, 2018, 39(6): 177-184. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201806017.htmCHEN Z M, NIU K, LI L, et al. Trajectory tracking method for quadrotor UAV based on BSP-ANN[J]. Acta Aeronautica et Astronautica Sinica, 2017, 39(6): 177-184(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201806017.htm [2] 吕品, 赖际舟, 杨天雨, 等. 基于气动模型辅助的四旋翼飞行器室内自主导航方法[J]. 航空学报, 2015, 36(4): 1275-1284. https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201504028.htmLYU P, LAI J Z, YANG T Y, et al. Autonomous navigation me-thod aided by aerodynamics model for an indoor quadrotor[J]. Acta Aeronautics et Astronautica Sinica, 2015, 36(4): 1275-1284(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKXB201504028.htm [3] 郑东琦, 王培臻, 尹昱昊, 等. 农业植保四旋翼飞行器的模糊PID控制[J]. 中国科技信息, 2018(21): 29-31. https://www.cnki.com.cn/Article/CJFDTOTAL-XXJK201821012.htmZHENG D Q, WANG P Z, YIN Y H, et al. Fuzzy PID control of agricultural plant protection quadrotor[J]. China Science and Technology Information, 2018(21): 29-31(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XXJK201821012.htm [4] DJAMEL K, ABDELLAH M, BENALLEGUE A. Attitude opt-imal backstepping controller-based quaternion for a UAV[J]. Mathematical Problems in Engineering, 2016(4): 1-11. http://smartsearch.nstl.gov.cn/paper_detail.html?id=4393457c47307d4554e0701fd43a6ea3 [5] 李家豪. 自抗扰控制的改进及其在四旋翼无人机上的应用[D]. 厦门: 厦门大学, 2018: 8-22.LI J H. Improvement of ADRC with applications to quadrotor UAVs[D]. Xiamen: Xiamen University, 2018: 8-22(in Chinese). [6] 朱超, 张红欣, 陈磊. 基于ANFIS_PID的四旋翼姿态控制系统设计与仿真[J]. 机床与液压, 2019, 47(11): 163-167. https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201911040.htmZHU C, ZHANG H X, CHEN L. Design and simulation of quadrotor attitude control system based on ANFIS-PID[J]. Machine Tool & Hydraulics, 2019, 47(11): 163-167(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JCYY201911040.htm [7] 高洁. 四旋翼无人机模糊PID控制算法研究和电路设计[D]. 哈尔滨: 哈尔滨工业大学, 2017: 19-46.GAO J. Research on fuzzy PID control algorithm of quadrotor and circuit design[D]. Harbin: Harbin Institute of Technology, 2017: 19-46(in Chinese). [8] 付岩果. 四旋翼无人机模糊PID姿态控制研究[D]. 舟山: 浙江海洋大学, 2019: 27-36.FU Y G. Research on fuzzy PID attitude control of quadrotor UAV[D]. Zhoushan: Zhejiang Ocean University, 2019: 27-36(in Chinese). [9] 宿敬亚, 樊鹏辉, 蔡开元. 四旋翼飞行器的非线性PID姿态控制[J]. 北京航空航天大学学报, 2011, 37(9): 1054-1058. https://bhxb.buaa.edu.cn/CN/abstract/abstract12060.shtmlSU J Y, FAN P H, CAI K Y. Attitude control of quadrotor air-craft via nonlinear PID[J]. Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(9): 1054-1058(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract12060.shtml [10] 蒋林, 冷雪峰, 罗小华, 等. 基于模糊单神经元PID的四旋翼控制研究[J]. 计算机仿真, 2019, 36(10): 39-43. https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201910009.htmJIANG L, LENG X F, LUO X H, et al. Quadrotor control based on fuzzy-single neuron PID controller[J]. Computer Simulation, 2019, 36(10): 39-43(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSJZ201910009.htm [11] 余后明, 刘彦臣, 郑士振, 等. 基于改进型BP神经网络的四旋翼控制系统[J]. 甘肃科学学报, 2019, 31(2): 87-91. https://www.cnki.com.cn/Article/CJFDTOTAL-GSKX201902015.htmYU H M, LIU Y C, ZHENG S Z, et al. Four-rotor control sys-tem based on improved BP neural network[J]. Journal of Gansu Sciences, 2019, 31(2): 87-91(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-GSKX201902015.htm [12] 张莹, 刘子龙. 基于RBF神经网络的X型四旋翼飞行器优化控制[J]. 软件导刊, 2019, 18(12): 51-55. https://www.cnki.com.cn/Article/CJFDTOTAL-RJDK201912012.htmZHANG Y, LIU Z L. X-type quadrotor aircraft control based on RBF neural network PID[J]. Software Guide, 2019, 18(12): 51-55(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-RJDK201912012.htm [13] 韩京清. 自抗扰控制技术: 估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 243-288.HAN J Q. Active disturbance rejection control technique-The technique for estimating and compensating the uncertainties[M]. Beijing: National Defense Industry Press, 2008: 243-288(in Chinese). [14] 吕家启. 四旋翼无人机抗风控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2019: 1-16.LV J Q. Research on wind resistance control technology of quadrotor unmanned aerial vehicle[D]. Harbin: Harbin Institute of Technology, 2019: 1-16(in Chinese). [15] YANG H J, CHENG L, XIA Y Q, et al. Active disturbance rejection attitude control for a dual closed-loop quadrotor under gust wind[J]. IEEE Transactions on Control Systems Technology, 2018, 26(4): 1400-1405. http://www.onacademic.com/detail/journal_1000039936782510_520e.html [16] 张勇, 陈增强, 张兴会, 等. 四旋翼无人机系统PD-ADRC串级控制[J]. 系统工程与电子技术, 2018, 40(9): 2055-2061. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201809023.htmZHANG Y, CHEN Z Q, ZHANG X H, et al. PD-ADRC cascade control for quadrotor system[J]. Systems Engineering and El-ectronics, 2018, 40(9): 2055-2061(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201809023.htm [17] 闫桂林, 李彦. 基于改进自抗扰的四旋翼飞行器姿态控制[J]. 电子测量技术, 2019, 42(16): 71-77. https://www.cnki.com.cn/Article/CJFDTOTAL-DZCL201916014.htmYAN G L, LI Y. Attitude control of quadrotor based on impr-oved auto disturbance rejection[J]. Electronic Measurement Technology, 2019, 42(16): 71-77(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-DZCL201916014.htm [18] 刘栩粼, 郭玉英. 四旋翼无人机时延模糊自抗扰容错控制[J]. 测控技术, 2020, 39(1): 55-60. https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS202001010.htmLIU X L, GUO Y Y. Fault-tolerant control of quadrotor UAV based on fuzzy active disturbance rejection control and time delay control[J]. Measurement & Control Technology, 2020, 39(1): 55-60(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-IKJS202001010.htm [19] 章志诚. 基于ADRC的四旋翼飞行器自主避障控制系统研究[D]. 杭州: 浙江大学, 2017.ZHANG Z C. Research on autonomous obstacle avoidance of quadrotor system based on ADRC[D]. Hangzhou: Zhejiang University, 2017(in Chinese). [20] WONG T L, KHAN R R, LEE D. Model linearization and H∞ controller design for a quadrotor unmanned air vehicle: Simulation study[C]//2013 13th International Conference on Control, Automation, Robotics & Vision. Piscataway: IEEE Press, 2014: 1490-1495. -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 827
- HTML全文浏览量: 197
- PDF下载量: 180
- 被引次数: 0
