



-
摘要:
小型菱形翼无人机起飞滑跑面临着简陋跑道条件带来的干扰和自身非线性因素影响的问题,现有控制方法对无人机起飞滑跑的滚转控制重视不足。针对该问题,以某型菱形翼无人机的起飞滑跑试验为切入点,分析了该布局无人机起飞滑跑面临的问题和菱形翼布局的特点,设计了一种基于反步控制方法的菱形翼无人机地面起飞滑跑控制器。所提控制方法充分考虑了起飞条件带来的干扰及无人机本身非线性因素的影响,对无人机起飞滑跑的航向和滚转进行了有效控制。仿真和无人机起飞滑跑结果表明了所提控制方法的有效性。
Abstract:Small joined-wing UAVs always face the disturbance caused by simple runway conditions and the influence of their own nonlinear factors. The existing control methods do not pay enough attention to the rolling control of the UAV during takeoff taxiing. In order to solve these problems, this paper analyzes the problems faced by the takeoff taxiing and the characteristics of joined-wing layout from the example of a certain type of joined-wing UAV taxiing test, and then designs a joined-wing UAV takeoff taxiing controller based on the backstepping control method. The control method takes full account of the interference caused by the takeoff conditions and the influence of UAV nonlinear factors, and effectively controls the yaw and roll of the UAV's takeoff taxiing. Simulation and UAV taxiing test results show that the proposed design method is effective.
-
Key words:
- joined-wing UAV /
- taxiing control /
- backstepping control method /
- nonlinear effect /
- robustness
-

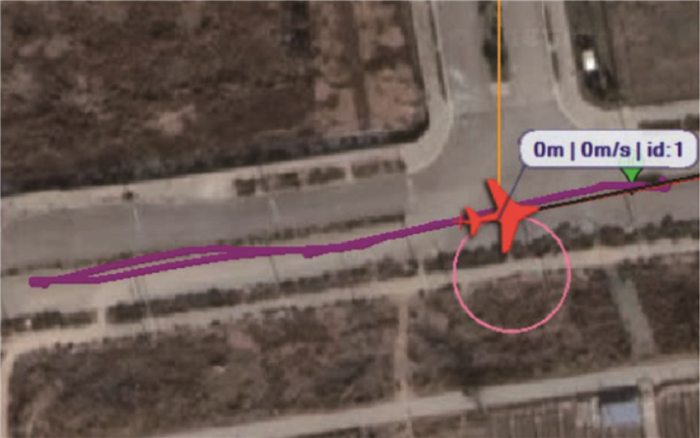
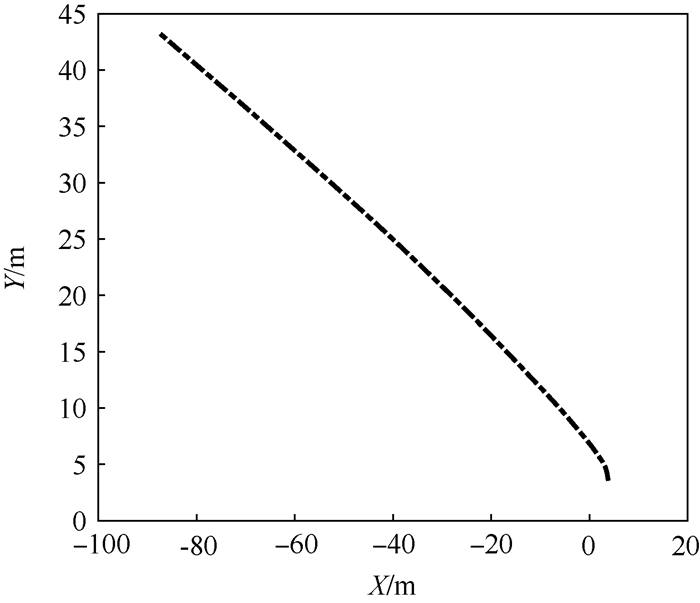
图 3 菱形翼无人机遥控起飞滑跑轨迹
Figure 3. Joined-wing UAV remote control takeoff taxiing trajectory

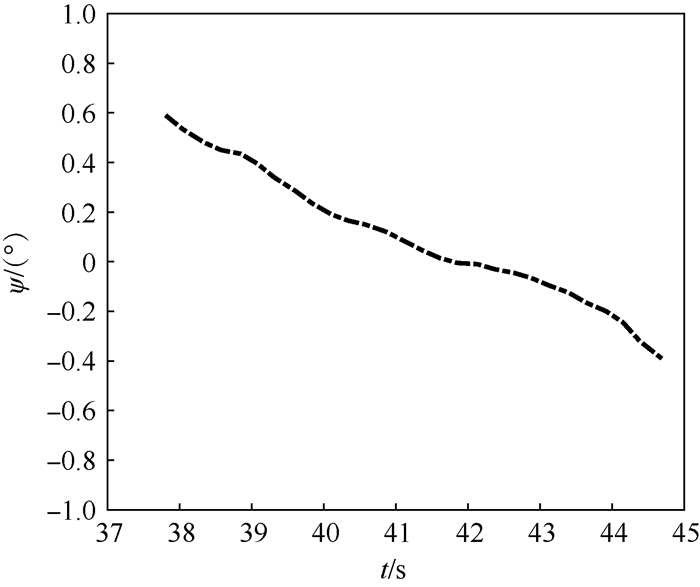
图 4 菱形翼无人机遥控起飞滑跑偏航角
Figure 4. Yaw angle of joined-wing UAV remote control takeoff taxiing

图 5 菱形翼无人机遥控起飞滑跑滚转角
Figure 5. Roll angle of joined-wing UAV remote control takeoff taxiing

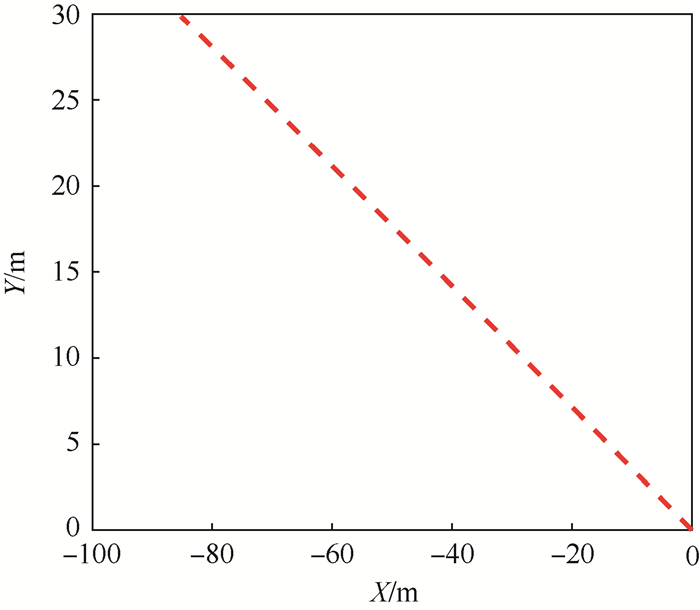
图 6 菱形翼无人机纵向-横向起飞滑跑轨迹
Figure 6. Longitudinal and horizontal takeoff taxiing trajectory of joined-wing UAV

图 7 菱形翼无人机地面起飞滑跑姿态角响应
Figure 7. Attitude angle response of joined-wing UAV ground takeoff taxiing

图 8 菱形翼无人机地面起飞滑跑控制舵面响应
Figure 8. Rudder response of joined-wing UAV ground takeoff taxiing control

图 9 具有控制器的菱形翼无人机起飞滑跑轨迹
Figure 9. Joined-wing UAV takeoff taxiing trajectory with controller
表 1 地面起飞滑跑试验菱形翼无人机气动参数偏移设置
Table 1. Aerodynamic parameter offset setup of joined-wing UAV for ground takeoff taxiing test
系数 ΔCβL ΔCβN CpL CrN η 偏移/% 15 -20 20 20 15  下载: 导出CSV
下载: 导出CSV
-
[1] 刘杰, 张曙光.连接翼布局纵向控制特性[J].航空学报, 2008, 29(5):91-96. http://www.cnki.com.cn/Article/CJFDTotal-HKXB2008S1014.htmLIU J, ZHANG S G.Longitudinal control features of joined-wing configuration[J]. Acta Aeronautica et Astronautica Sinica, 2008, 29(5):91-96(in Chinese). http://www.cnki.com.cn/Article/CJFDTotal-HKXB2008S1014.htm [2] 李继广, 陈欣, 李亚娟, 等.飞翼无人机机动飞行非线性鲁棒控制方法[J].北京航空航天大学学报, 2018, 44(1):89-98. doi: 10.13700/j.bh.1001-5965.2017.0014LI J G, CHEN X, LI Y J, et al.Nonlinear robust control method for maneuver flight of flying wing UAV[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(1):89-98(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0014 [3] CHANDAR D D J, DAMODARAN M.Computational study of unsteady low-Reynolds-number airfoil aerodynamics using moving overlapping meshes[J].AIAA Journal, 2008, 46(2):429-438. doi: 10.2514/1.31499 [4] 孙俊磊, 王和平, 周洲, 等.基于天线安装的菱形翼无人机翼型优化设计[J].航空学报, 2017, 38(11):1-14. http://d.old.wanfangdata.com.cn/Periodical/hkxb201711001SUN J L, WANG H P, ZHOU Z, et al.Aerodynamic optimization design of diamond-wing configuration UAV airfoil based on radar antenna installation[J].Acta Aeronautica et Astronautica Sinica, 2017, 38(11):1-14(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201711001 [5] 张琳, 龚喜盈, 庞俊锋.轮式起降无人机滑跑起飞阶段动力学仿真研究[J].航空工程进展, 2018, 9(3):371-375. http://d.old.wanfangdata.com.cn/Periodical/hkgcjz201803012ZHANG L, GONG X Y, PANG J F.Dynamics simulation research on tricycle landing gear UAV during taxiing and take-off phase[J].Advances in Aeronautical Science and Engineering, 2018, 9(3):371-375(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkgcjz201803012 [6] EVANS P, PERHINSCHI M, MULLINS S.Modeling and simulation of a tricycle landing gear at normal and abnormal conditions: AIAA-2010-7618[R].Reston: AIAA, 2010. [7] EVANS P E.Modeling and simulation of tricycle landing gear at normal and abnormal conditions[D].Morgantown: West Virginia University, 2010. [8] 王彦雄, 周洲, 邵壮, 等.飞翼布局无人机滑跑纠偏控制[J].西北工业大学学报, 2016, 34(4):593-601. http://d.old.wanfangdata.com.cn/Periodical/xbgydxxb201604007WANG Y X, ZHOU Z, SHAO Z, et al.Lateral deviation correction control for flying-wing UAV taxiing[J].Journal of Northwestern Polytechnical University, 2016, 34(4):593-601(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xbgydxxb201604007 [9] 王鹏, 周洲.飞翼无人机着陆滑跑建模和控制仿真研究[J].系统仿真学报, 2011, 23(1):118-122. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201101025WANG P, ZHOU Z.Study of modeling and control simulation for flying-wing UAV in ground motion during landing[J].Journal of System Simulation, 2011, 23(1):118-122(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201101025 [10] 吴成富, 闫冰, 邵朋院.基于模糊控制的无人机滑跑起飞控制方法研究[J].西北工业大学学报, 2015, 33(1):33-39. doi: 10.3969/j.issn.1000-2758.2015.01.007WU C F, YAN B, SHAO P Y.Exploring taxiing take-off control for unmanned aerial vehicle(UAV) based on fuzzy control[J].Journal of Northwest Polytechnic University, 2015, 33(1):33-39(in Chinese). doi: 10.3969/j.issn.1000-2758.2015.01.007 [11] 张震, 贾玉红.无人机地面滑跑方向稳定性模糊控制研究[J].飞机设计, 2016, 36(2):18-21. doi: 10.3969/j.issn.1674-9804.2016.02.004ZHANG Z, JIA Y H.Application of fuzzy control in UAV on-ground directional control system[J].Aircraft Design, 2016, 36(2):18-21(in Chinese). doi: 10.3969/j.issn.1674-9804.2016.02.004 [12] 宋荣志, 李艳辉, 厉明.无人机地面滑跑前轮方向舵联合纠偏控制系统设计[J].计算机测量与控制, 2015, 23(9):3056-3059. http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz201509038SONG R Z, LI Y H, LI M.Design of lateral deviation correction control for UAV taxing with node wheel and rudder[J].Computer Measurement & Control, 2015, 23(9):3056-3059(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjzdclykz201509038 [13] 郝现伟, 杨业, 贾志强, 等.无人机着陆滑跑数学模型与纠偏控制[J].电机与控制学报, 2014, 18(5):85-92. doi: 10.3969/j.issn.1007-449X.2014.05.014HAO X W, YANG Y, JIA Z Q, et al.Mathematic model and deviation-correction control for UAV taxiing[J].Electric Machines and Control, 2014, 18(5):85-92(in Chinese). doi: 10.3969/j.issn.1007-449X.2014.05.014 [14] 薛志鹏, 厉明, 李艳辉, 等.小型无人机三轮滑跑纠偏控制的建模与仿真[J].系统仿真学报, 2013, 25(11):2557-2560. http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201311008XUE Z P, LI M, LI Y H, et al.Modeling and lateral deviation controlling for small UAV with three wheels in ground motion[J].Journal of System Simulation, 2013, 25(11):2557-2560(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/xtfzxb201311008 [15] 王永全, 魏小辉, 尹乔之, 等.高速无人机着陆滑跑纠偏联合仿真研究[J].航空计算技术, 2016, 46(1):60-63. doi: 10.3969/j.issn.1671-654X.2016.01.015WANG Y Q, WEI X H, YIN Q Z, et al.Co-simulation research of deviation correction control for high-speed UAV taxiing[J].Aeronautical Computing Technique, 2016, 46(1):60-63(in Chinese). doi: 10.3969/j.issn.1671-654X.2016.01.015 [16] 孙俊磊, 王和平, 周洲, 等.螺旋桨滑流对菱形翼布局无人机气动的影响[J].航空学报, 2018, 39(1):136-149. http://d.old.wanfangdata.com.cn/Periodical/hkxb201801012SUN J L, WANG P, ZHOU Z, et al.Effects of propeller slipstream on aerodynamic performance of diamond joined-wing configuration UAV[J].Acta Aeronautica et Astronautica Sinica, 2018, 39(1):136-149(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201801012 [17] 张伸, 王青, 董朝阳, 等.基于跟踪微分器的高超声速飞行器减步控制[J].北京航空航天大学学报, 2017, 43(10):2054-2062. doi: 10.13700/j.bh.1001-5965.2016.0791ZHANG Y, WANG Q, DONG C Y, et al.Reduced step control of hypersonic vehicle based on tracking differentiator[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10):2054-2062(in Chinese). doi: 10.13700/j.bh.1001-5965.2016.0791 [18] MA G, CHEN C, LYU Y, et al.Adaptive backstepping-based neural network control for hypersonic reentry vehicle with input constraints[J].IEEE Access, 2018, 6:1954-1966. doi: 10.1109/ACCESS.2017.2780994 [19] 陈明, 张士勇.基于Backstepping的非线性系统预设性能鲁棒控制器设计[J].控制与决策, 2015, 30(5):877-881. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201505015CHEN M, ZHANG S Y.Prescribed performance robust controller design for nonlinear systems based on Backstepping[J].Control & Decision, 2015, 30(5):877-881(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201505015 [20] CHEN F Y, JIANG R Q, JIANG B, et al.Robust backstepping sliding mode control and observer-based fault estimation for a quadrotor UAV[J].IEEE Transactions on Industrial Electronics, 2016, 25(52):37-48. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=998f7f756d4e3624fa6b26ec025d48ea [21] SONG S, LIU J, WANG H.Adaptive fault tolerant control for a class of nonlinear switched systems[J].IEEE Access, 2018, 6:7728-7738. doi: 10.1109/ACCESS.2018.2802906 -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 725
- HTML全文浏览量: 77
- PDF下载量: 206
- 被引次数: 0
