



Interval type-2 adaptive fuzzy sliding mode control design of reentry attitude for reusable launch vehicles
-
摘要:
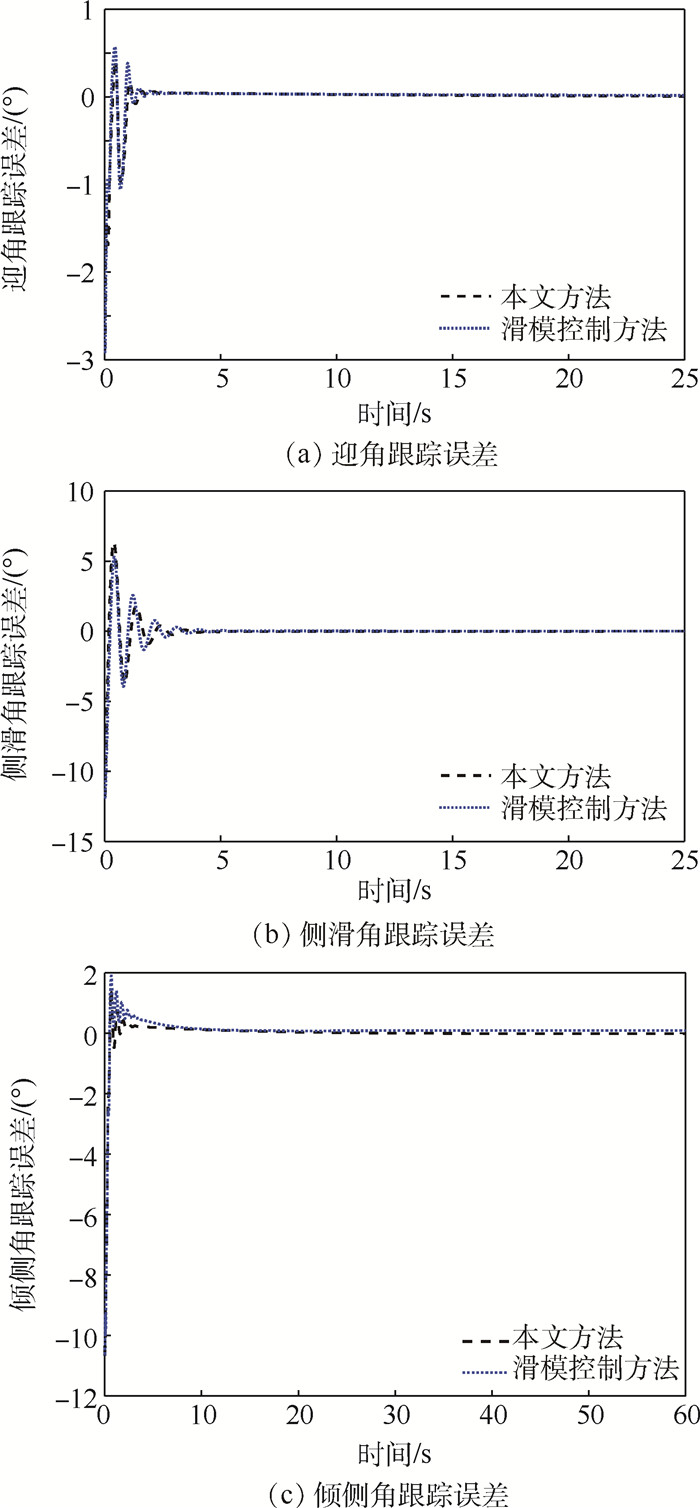
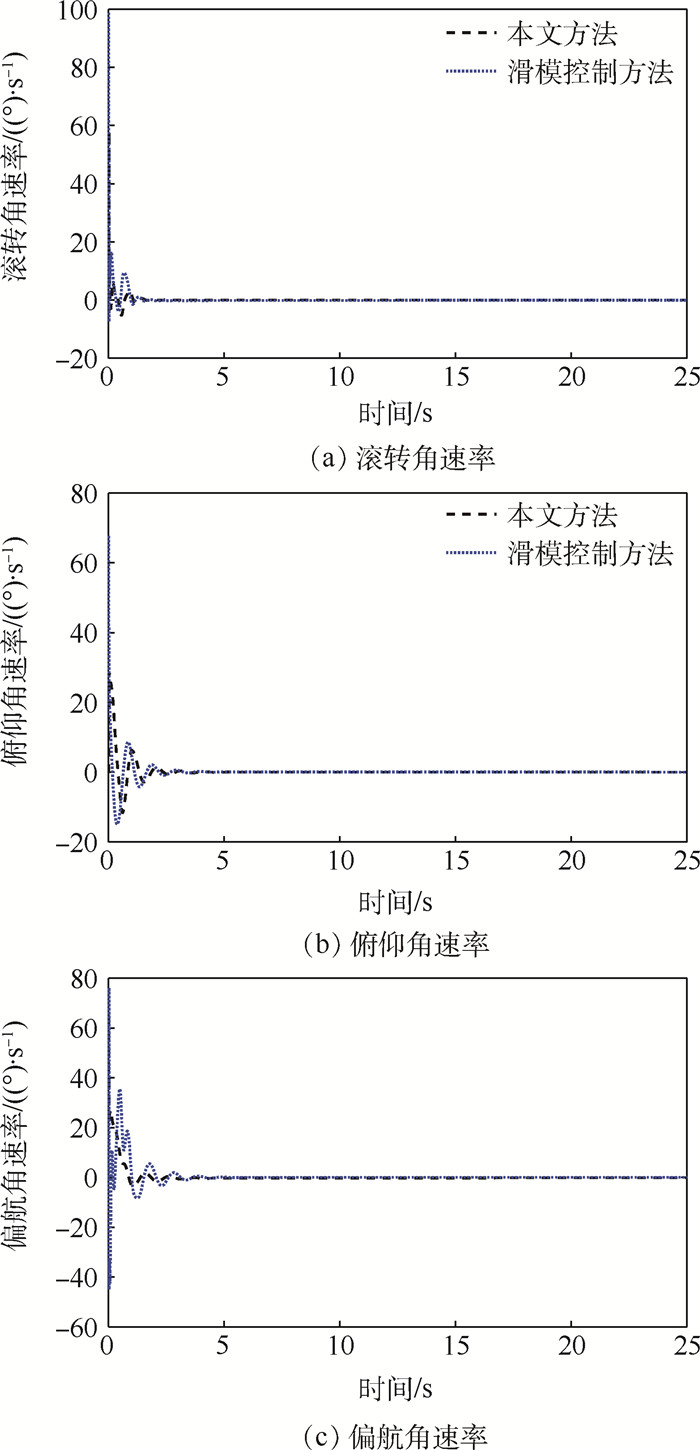
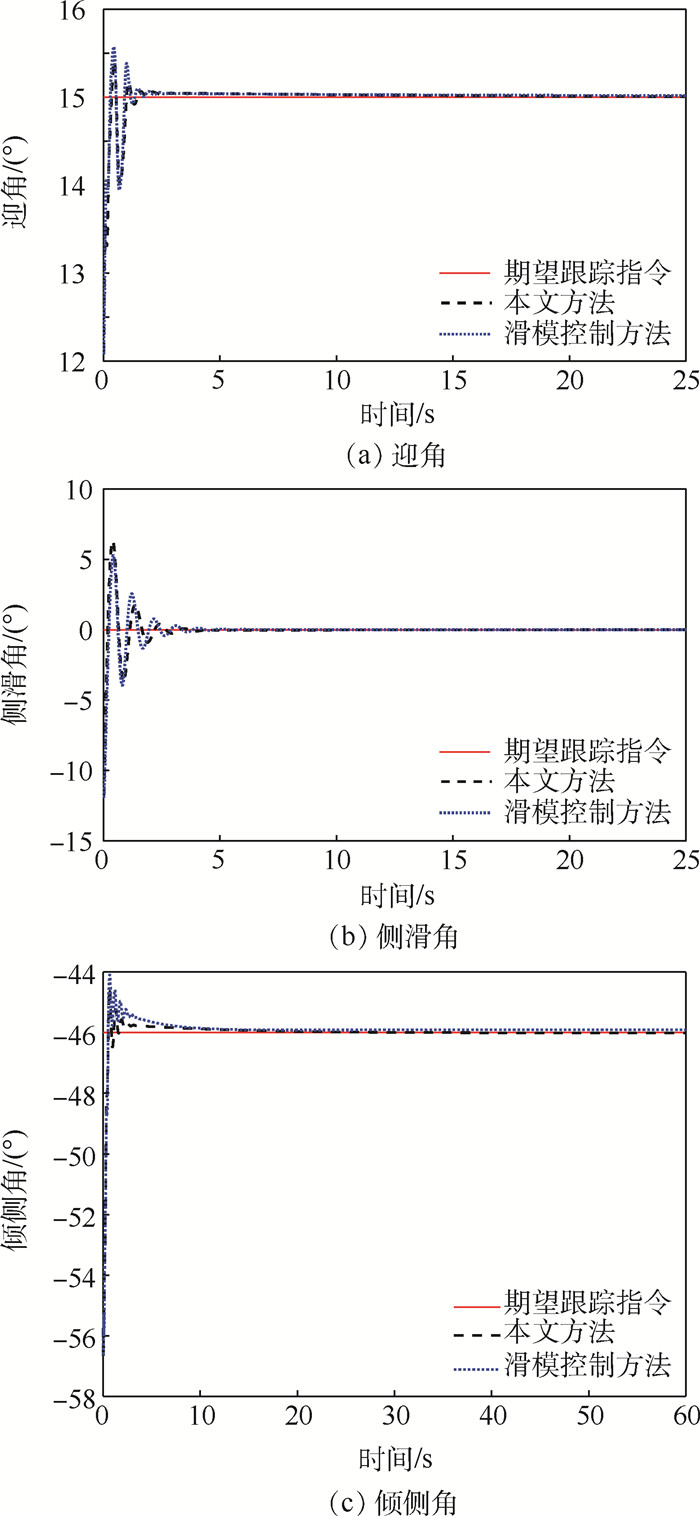
针对具有强非线性、多变量耦合特性的可重复使用飞行器(RLV),同时考虑模型参数不确定性和外界干扰对飞行器再入姿态跟踪的影响,提出了一种基于区间二型自适应模糊滑模的姿态控制方法。首先,建立飞行器再入动态模型,并基于反步思想将控制模型转化为姿态角和角速率相关子系统。其次,将模型参数不确定性和外界干扰视作子系统非线性项的一部分。再次,采用区间二型模糊系统逼近子系统非线性项,并结合自适应技术和滑模控制方法分别设计虚拟控制量和实际控制量。此外,引入一阶低通滤波器用以处理子系统虚拟控制律。通过Lyapunov方法的分析证明了闭环控制系统的稳定性,且飞行器姿态跟踪误差可收敛于原点附近的小邻域。最后,利用飞行器的数值仿真验证了所设计控制方法能有效跟踪飞行器参考指令,且对外界干扰有较强的鲁棒性。
-
关键词:
- 可重复使用飞行器(RLV) /
- 姿态控制 /
- 再入段 /
- 区间二型自适应模糊系统 /
- 滑模控制
Abstract:Considering the attitude tracking problem for reusable launch vehicles (RLVs) during reentry phase with high nonlinear and multi-variable coupling characteristics in the presence of parameter uncertainties and external disturbances, an interval type-2 adaptive fuzzy sliding mode based attitude control method is proposed in this paper. Firstly, the dynamic model for the RLV is developed, which is further transformed into attitude angle and angular rate subsystems using backstepping method. Secondly, the parameter uncertainties and external disturbances of the RLV model are regarded as part of the nonlinear terms of the subsystems. Thirdly, the nonlinear terms of the subsystems are approximated by the interval type-2 fuzzy system, while the virtual control signal and the actual control signal can be obtained respectively by combining the adaptive technique and sliding mode control method. Besides, the first-order low-pass filter is used to deal with the virtual control law of subsystem. The stability of the closed-loop control system is guaranteed via Lyapunov theory and the attitude tracking error can converge to a small neighborhood around the origin. Finally, the numerical simulation on the reentry vehicle is conducted to verify that the developed control method can track the reference commands effectively and have strong robustness again external disturbances.
-
表 1 再入RLV初始参数值
Table 1. Initial parameter values of reentry RLV
参数 数值 高度h/ft 260 000 速度v/(ft·s-1) 24 061 纬度ϕ/(°) 0 经度θ/(°) 0 航迹角γ/(°) 0 航向角χ/(°) 0 α/(°) 12.60 β/(°) 11.46 μ/(°) -57.29 p/((°)·s-1) 0 q/((°)·s-1) 0 r/((°)·s-1) 0  下载: 导出CSV
下载: 导出CSV
-
[1] HALBE O, RAJA R G, PADHI R.Robust reentry guidance of a reusable launch vehicle using model predictive static programming[J].Journal of Guidance, Control, and Dynamics, 2014, 37(1):134-148. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=0d5ec783c601896babdde2bea08afbef [2] 窦立谦, 毛奇, 苏沛华.基于自适应模糊控制的可重复使用运载器再入姿态控制[J].控制与决策, 2018, 37(7):1181-1189. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201807003DOU L Q, MAO Q, SU P H.Adaptive fuzzy attitude control design for reentry RLV[J].Control and Decision, 2018, 37(7):1181-1189(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kzyjc201807003 [3] GAO Z, JIANG B, SHI P, et al.Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique[J].Journal of the Franklin Institute, 2012, 349(4):1543-1560. doi: 10.1016/j.jfranklin.2011.11.003 [4] XU B, ZHANG Y.Neural discrete back-stepping control of hypersonic flight vehicle with equivalent prediction model[J].Neurocomputing, 2015, 154:337-346. doi: 10.1016/j.neucom.2014.11.059 [5] GROVES K P, SIGTHORSSON D O, SERRANI A, et al.Reference command tracking for a linearized model of an air-breathing hypersonic vehicle[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit.Reston: AIAA, 2005: 2901-2914. [6] GEORGIE J, VALASEK J.Evaluation of longitudinal desired dynamics for dynamic-inversion controlled generic reentry vehicles[J].Journal Guidance, Control, and Dynamics, 2003, 26(5):811-819. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=aaf227e20b65fc8e13eb10588602b332 [7] FIORENTINI L, SERRANI A, BOLENDER M A, et al.Nonlinear robust adaptive control of flexible air-breathing hypersonic vehicle model[J].Journal of Guidance, Control, and Dynamics, 2009, 32(2):401-416. [8] 刘燕斌, 陆宇平, 何真.高超音速飞机鲁棒自适应控制的研究[J].宇航学报, 2006, 27(4):620-624. doi: 10.3321/j.issn:1000-1328.2006.04.010LIU Y B, LU Y P, HE Z.Research on robust adaptive control for hypersonic vehicle[J].Journal of Astronautics, 2006, 27(4):620-624(in Chinese). doi: 10.3321/j.issn:1000-1328.2006.04.010 [9] WANG F, HUA C, ZONG Q.Attitude control of reusable launch vehicle in reentry phase with input constraint via robust adaptive backstepping control[J].International Journal of Adaptive Control and Signal Processing, 2015, 29(10):1308-1327. doi: 10.1002/acs.2541 [10] FALCOZ A, HENRY D, ZOLGHADRI A.Robust fault diagnosis for atmospheric reentry vehicles:A case study[J].IEEE Transactions on Systems, Man, and Cybernetics-Part A:Systems and Humans, 2010, 40(5):886-899. doi: 10.1109/TSMCA.2010.2063022 [11] SHTESSEL Y B, BUFFINGTON J, BANDA S.Multiple timescale flight control using reconfigurable sliding modes[J].Journal of Guidance, Control, and Dynamics, 1999, 22(6):873-883. [12] STOTT J E, SHTESSEL Y B.Launch vehicle attitude control using sliding mode control and observation techniques[J].Journal of the Franklin Institute, 2012, 349(2):397-412. doi: 10.1016/j.jfranklin.2011.07.020 [13] LIU J, VAZQUEZ S, WU L, et al.Extended state observer-based sliding-mode control for three-phase power converters[J].IEEE Transactions on Industrical Electronics, 2016, 64(1):22-31. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=5029b59f62e23ad7540391389f5c9927 [14] FU C, SARABAKHA A, KAYACAN E, et al.Input uncertainty sensitivity enhanced nonsingleton fuzzy logic controllers for long-term navigation of quadrotor UAVs[J].IEEE/ASME Transactions on Mechatronics, 2018, 23(2):725-734. https://ieeexplore.ieee.org/document/8304792/ [15] SHEN Q, JIANG B, COCQUEMPOT V.Fuzzy logic system-based adaptive fault-tolerant control for near-space vehicle attitude dynamics with actuator faults[J].IEEE Transactions on Fuzzy Systems, 2013, 21(2):289-300. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e8fbeeb48881ae9abb95d36af680f840 [16] MAO Q, DOU L, ZONG Q, et al.Attitude controller design for reusable launch vehicles during reentry phase via compound adaptive fuzzy H-infinity control[J].Aerospace Science and Technology, 2018, 72:36-48. doi: 10.1016/j.ast.2017.10.012 [17] KAYACAN E, RAMON H, KAYNAK O, et al.Towards agrobots:Trajectory control of an autonomous tractor using type-2 fuzzy logic controllers[J].IEEE/ASME Transactions on Mechatronics, 2015, 20(1):287-298. https://core.ac.uk/display/34605030 [18] LIANG Q, MENDEL J M.Interval type-2 fuzzy logic systems:Theory and design[J].IEEE Transactions on Fuzzy Systems, 2000, 8(5):535-550. doi: 10.1109/91.873577 [19] WU H, MENDEL J M.Uncertainty bounds and their use in the design of interval type-2 fuzzy logic systems[J].IEEE Transactions on Fuzzy Systems, 2002, 10(5):622-639. doi: 10.1109/TFUZZ.2002.803496 [20] LI H, WU C, SHI P, et al.Control of nonlinear networked systems with packet dropouts:Interval type-2 fuzzy model-based approach[J].IEEE Transactions on Cybernetics, 2014, 45(11):2378-2389. https://www.ncbi.nlm.nih.gov/pubmed/25474817 [21] KUMBASAR T.Robust stability analysis and systematic design of single input interval type-2 fuzzy logic controllers[J].IEEE Transactions on Fuzzy Systems, 2016, 24(3):675-694. doi: 10.1109/TFUZZ.2015.2471805 [22] TAO X, YI J, YUAN R, et al.Control of a flexible air-breathing hypersonic vehicle with measurement noises using adaptive interval type-2 fuzzy logic system[C]//IEEE International Conference on Fuzzy Systems.Piscataway, NJ: IEEE Press, 2017. [23] WANG L X.Stable adaptive fuzzy control of nonlinear systems[J].IEEE Transactions on Fuzzy Systems, 1993, 1(2):146-155. doi: 10.1109/91.227383 [24] WANG F, HUA C, ZONG Q.Attitude control of reusable launch vehicle in reentry phase with input constraint via robust adaptive backstepping control[J].International Journal of Adaptive Control and Signal Processing, 2015, 29(10):1308-1327. doi: 10.1002/acs.2541 -

 下载:
下载:


 点击查看大图
点击查看大图
计量
- 文章访问数: 475
- HTML全文浏览量: 27
- PDF下载量: 104
- 被引次数: 0
