



Spacecraft non-singular adaptive terminal sliding mode attitude-orbit coupling control
-
摘要:
为了实现航天器姿态与轨道的同步控制,提出了一种航天器姿态与轨道联合控制的非奇异自适应终端滑模控制律。首先,建立了航天器姿轨耦合运动的对偶四元数模型;其次,提出了一种姿轨联合跟踪控制的非奇异终端滑模控制律,并设计了自适应控制律以改善质量特性不确定性的影响,利用李雅普诺夫函数证明了所提控制律的稳定性;最后,绕飞小行星的跟踪控制仿真算例表明了控制律的有效性。结果表明:所提控制律具有较高的控制精度,能够在有限时间内收敛,仿真过程中不存在奇异点,抑制了质量特性的不确定性对控制的影响,且对滑模的抖振特性有抑制效果。
Abstract:A non-singular adaptive terminal sliding mode control law is proposed to simultaneously control the attitude and orbit of the spacecraft. Firstly, the attitude-orbit coupling dynamic model of the spacecraft with parameter uncertainty is established based on the dual quaternion. Secondly, based on the integrated model of spacecraft, non-singular terminal sliding mode control law is proposed to track the target. Considering the uncertainty of spacecraft quality characteristics, an adaptive control law is designed to further improve the controller effect. The stability of the above control law is proved by the Lyapunov function. Finally, the simulation example of tracking control around the asteroid shows the effectiveness of the control law. The results show that the controller has higher control precision and can converge in limited time. There is no singularity in the simulation. The controller suppresses the influence of the uncertainty of quality characteristics on the control, and the terminal sliding mode chattering characteristics.
-

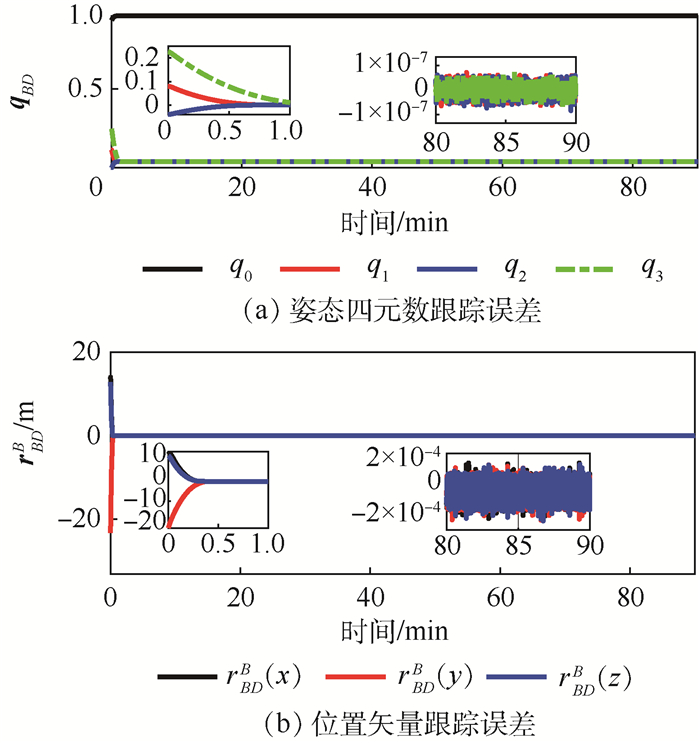
图 1 终端滑模控制位姿跟踪误差
Figure 1. Orbit and attitude tracking error of terminal sliding mode control

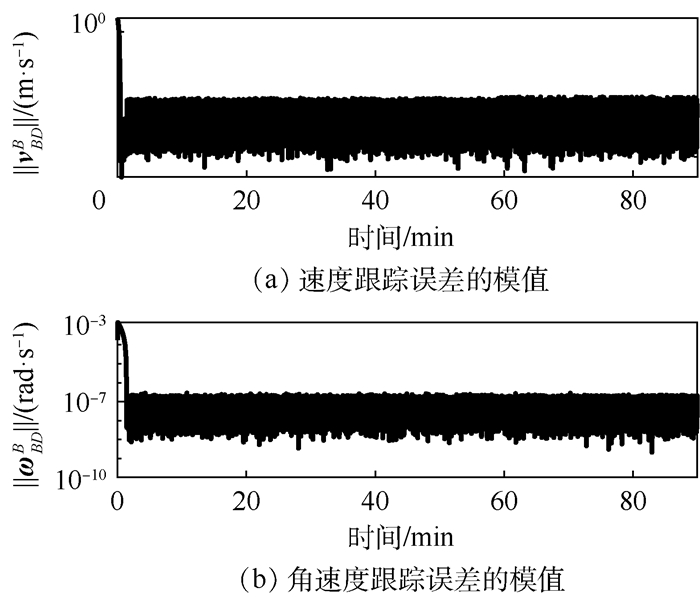
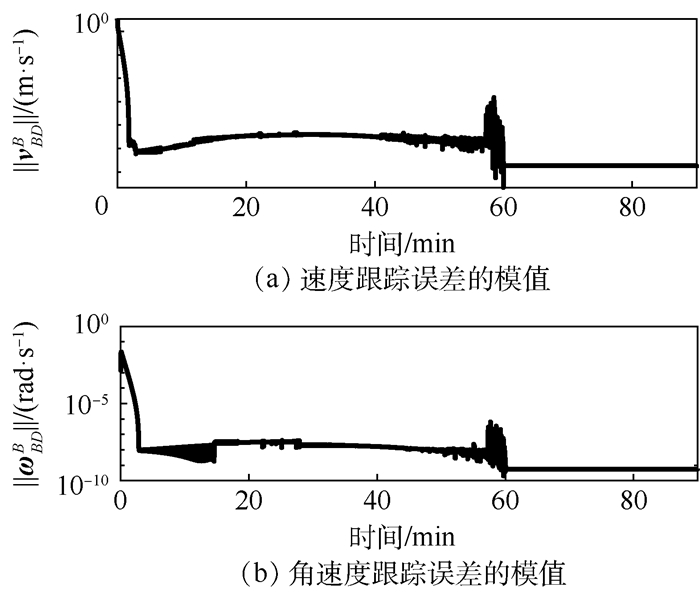
图 3 终端滑模控制速度与角速度跟踪误差
Figure 3. Velocity and angular velocity tracking error of terminal sliding mode control

图 4 对照组速度与角速度跟踪误差
Figure 4. Velocity and angular velocity tracking error in comparison group

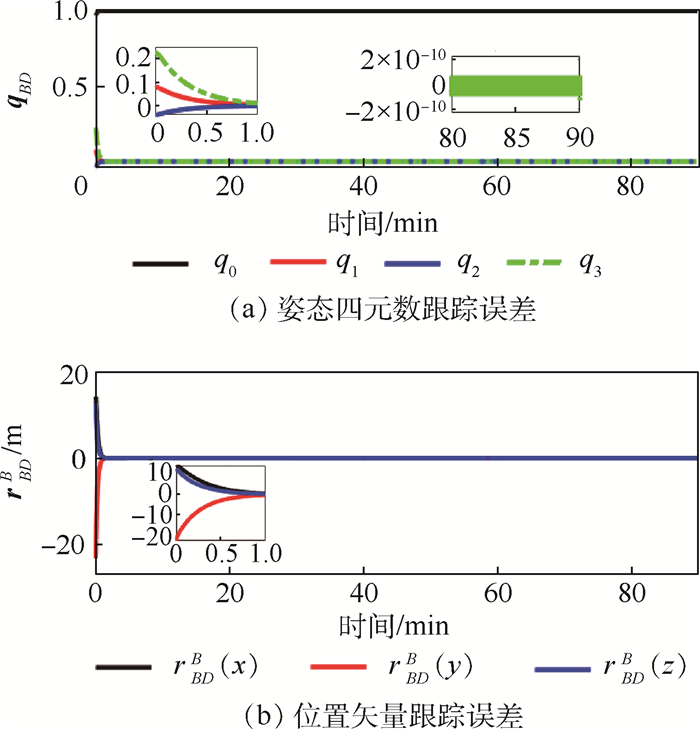
图 7 自适应终端滑模控制位姿跟踪误差
Figure 7. Orbit and attitude tracking error of adaptive terminal sliding mode control

图 8 自适应终端滑模控制速度与角速度跟踪误差
Figure 8. Velocity and angular velocity tracking error of adaptive terminal sliding mode control
-
[1] 朱战霞, 史格非, 樊瑞山.航天器相对运动姿轨耦合动力学建模方法[J].飞行力学, 2018, 36(1):1-6. http://d.old.wanfangdata.com.cn/Periodical/fxlx201801001ZHU Z X, SHI G F, FAN R S.Dynamic modeling methods of attitude and orbital coupling for spacecraft relative motion[J].Flight Dynamics, 2018, 36(1):1-6(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/fxlx201801001 [2] 武元新.对偶四元数导航算法与非线性高斯滤波研究[D].长沙: 国防科学技术大学, 2005.WU Y X.Research on dual-quaternion navigation algorithm and nonlinear Gaussian filtering[D].Changsha: National University of Defense Technology, 2005(in Chinese). [3] 张洪珠.基于对偶四元数的航天器姿轨一体化动力学建模与控制[D].哈尔滨: 哈尔滨工业大学, 2010.ZHANG H Z.Integrated dynamics modeling and control for space- craft based on dual quaternion[D].Harbin: Harbin Institute of Technology, 2010(in Chinese). [4] 党庆庆, 桂海潮, 徐明, 等.无速度反馈的航天器姿轨耦合跟踪控制[J].航空学报, 2018, 39(S1):722202. http://d.old.wanfangdata.com.cn/Periodical/hkxb2018z1010DANG Q Q, GUI H C, XU M, et al.Attitude and position tracking control for spacecraft without velocity measurement[J].Acta Aeronautica et Astronautica Sinica, 2018, 39(S1):722202(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb2018z1010 [5] GUI H C, VUKOVICH G.Dual-quaternion-based adaptive motion tracking of spacecraft with reduced control effort[J].Nonlinear Dynamics, 2016, 83(1-2):579-614. doi: 10.1007/s11071-015-2348-y [6] ZOU A M, KUMAR K D, HOU Z G.Finite-time attitude tracking control for spacecraft using terminal sliding mode and Chebyshev neural network[J].IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics, 2011, 41(4):950-963. doi: 10.1109/TSMCB.2010.2101592 [7] ZOU A M, KUMAR K D, HOU Z G.Corrections to "finite-time attitude tracking control for spacecraft using terminal sliding model and Chebyshev neural network"[J].IEEE Transactions on Systems, Man, and Cybernetics, Part B:Cybernetics, 2013, 43(2):803. doi: 10.1109/TSMCB.2012.2215317 [8] 王剑颖.航天器姿轨一体化动力学建模、控制与导航方法研究[D].哈尔滨: 哈尔滨工业大学, 2013.WANG J Y.Research on spacecraft integrated orbit and attitude dynamics, control and navigation[D].Harbin: Harbin Institute of Technology, 2013(in Chinese). [9] DONG H Y, HU Q L, AKELLA M R.Dual-quaternion-based spacecraft autonomous rendezvous and docking under six-degree-of-freedom motion constraints[J].Journal of Guidance, Control, and Dynamics, 2018, 41(5):1150-1162. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=df0be59f17972f2e977de02fc0ca7f2b [10] DONG H, HU Q, MA G.Dual-quaternion based fault-tolerant control for spacecraft formation flying with finite-time convergence[J].ISA Transactions, 2016:61:87-94. doi: 10.1016/j.isatra.2015.12.008 [11] 朱庆华, 董瑞琦, 马广富.基于动态滑模控制的挠性航天器姿态控制[J].控制理论与应用, 2018, 35(10):1430-1435. doi: 10.7641/CTA.2018.70863ZHU Q H, DONG R Q, MA G F.Dynamical sliding mode for flexible spacecraft attitude control[J].Control Theory & Applications, 2018, 35(10):1430-1435(in Chinese). doi: 10.7641/CTA.2018.70863 [12] TIWARI P M, JANARDHANAN S, NABI M.Attitude control using higher order sliding mode[J].Aerospace Science and Technology, 2016, 54:108-113. doi: 10.1016/j.ast.2016.04.012 [13] BRODSKY V, SHOHAM M.Dual numbers representation of rigid body dynamics[J].Mechanism and Machine Theory, 1999, 34(5):693-718. doi: 10.1016/S0094-114X(98)00049-4 [14] WANG J, LIANG H, SUN Z, et al.Finite-time control for spacecraft formation with dual-number-based description[J].Journal of Guidance, Control, and Dynamics, 2012, 35(3):950-962. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=e57f93ef1b2d1eb7e20121c6da534bb8 [15] AHEMD J, COPPOLA T V, BERNSTEIN S D.Adaptive asymptotic tracking of spacecraft attitude motion with inertia matrix identification[J].Journal of Guidance, Control, and Dynamics, 1998, 21(5):684-691. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=b4aec4abf340e6555a8e0c562305131b [16] DANG Q Q, GUI H C, WEN H.Dual-duaternion-based spacecraft pose tracking with a global exponential velocity observer[J].Journal of Guidance, Control, and Dynamics, 2019, 42(9):2106-2115. doi: 10.2514/1.G004302 [17] LEE D, VUKOVICH G.Robust adaptive terminal sliding mode control on SE(3)for autonomous spacecraft rendezvous and docking[J].Nonlinear Dynamics, 2016, 83:2263-2279. doi: 10.1007/s11071-015-2479-1 -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 537
- HTML全文浏览量: 100
- PDF下载量: 90
- 被引次数: 0
