



-
摘要:
为保证无人机安全稳定的飞行,实现高精度的航迹跟踪,基于引导点的非线性制导算法,提出了一种引导长度自适应的航迹跟踪方法。首先建立无人机运动学模型,依此对非线性的制导算法进行理论分析与试验验证,建立无人机飞行速度与引导长度之间的关系。之后引出引导长度自适应的航迹跟踪方法,详细讨论方法的具体实现过程。最后通过各种情况下的仿真对比试验,验证所提出方法的有效性。仿真结果表明,所提出的方法能较精确地跟踪各种复杂航迹,同时在较大的初始偏差和航路点临时切换的情况下能稳定、快速地收敛到期望航迹,更好地满足各种实际飞行任务的需求。
Abstract:To guarantee the flight stability and high accuracy of path following for unmanned aerial vehicles (UAVs), a nonlinear path following method with adaptive guidance length is proposed. First, the kinematic model of UAVs was built. Second, the relation between guidance length and velocity of UAVs was found according to the theoretical analysis and flight experiments of nonlinear guidance law. Then the theory and detailed realization process of the adaptive guidance length method was discussed. Finally, simulation in various situations was carried out to verify the effectiveness of the proposed method. The simulation results show that the proposed method is able to track complex trajectory accurately, even with large initial cross track error or during waypoint switching process. It can satisfy the requirement of actual flight missions.
-
Key words:
- path following /
- UAV /
- nonlinear guidance method /
- adaptive guidance length /
- high accuracy
-

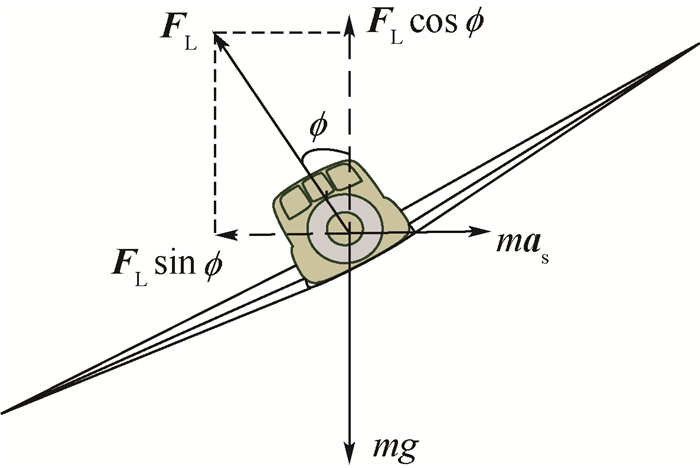
图 2 无人机滚转时重力与升力的平衡关系
Figure 2. Equilibrium relationship between weight and lift on rolling of UAV

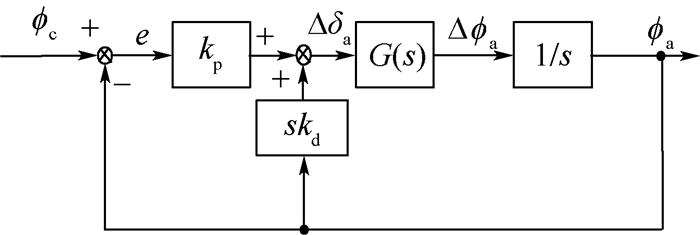
图 8 滚转通道闭环传递函数的框图
Figure 8. Block diagram of roll channel closed-loop transfer function

图 9 滚转通道闭环传递函数的伯德图
Figure 9. Bode diagram of roll channel closed-loop transfer function

图 10 自适应引导长度的航迹跟踪方法原理图
Figure 10. Illustrative diagram of path following method with adaptive guidance length

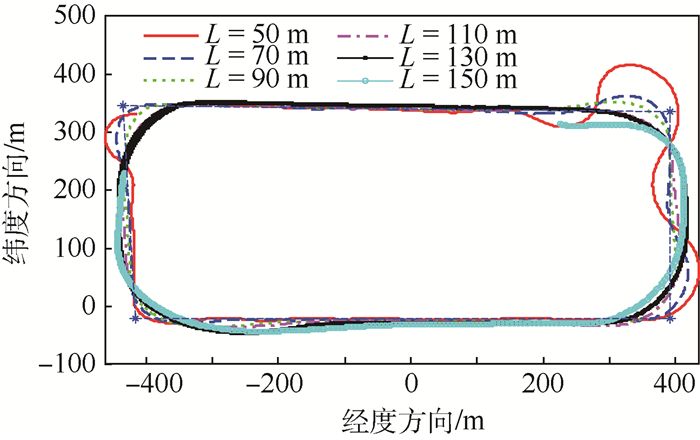
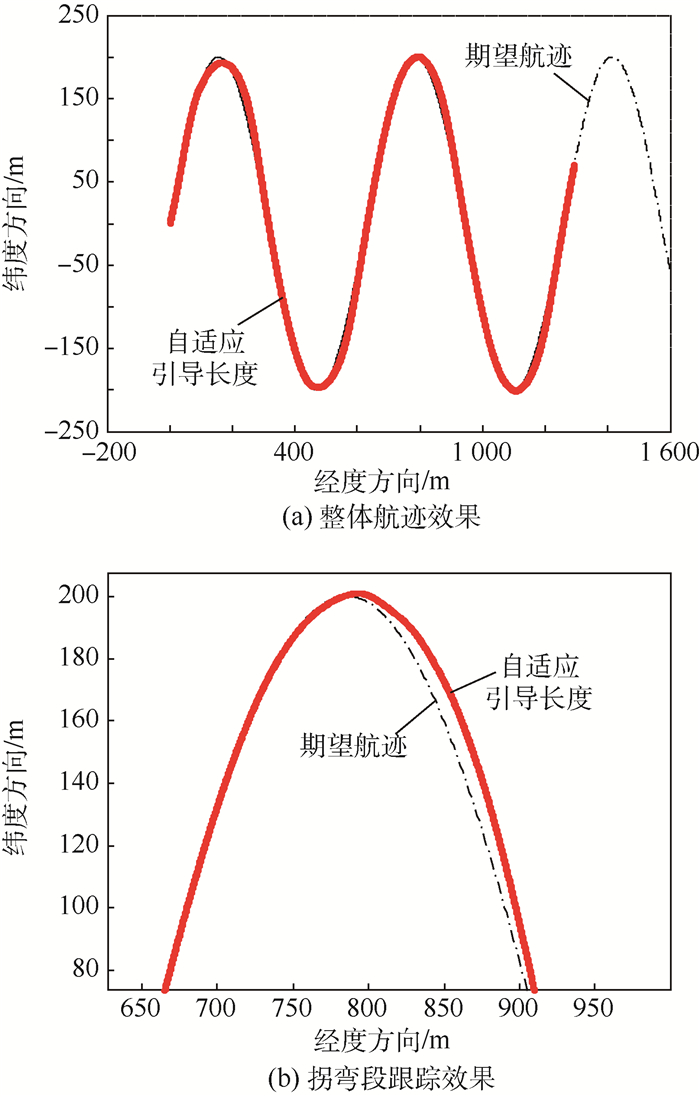
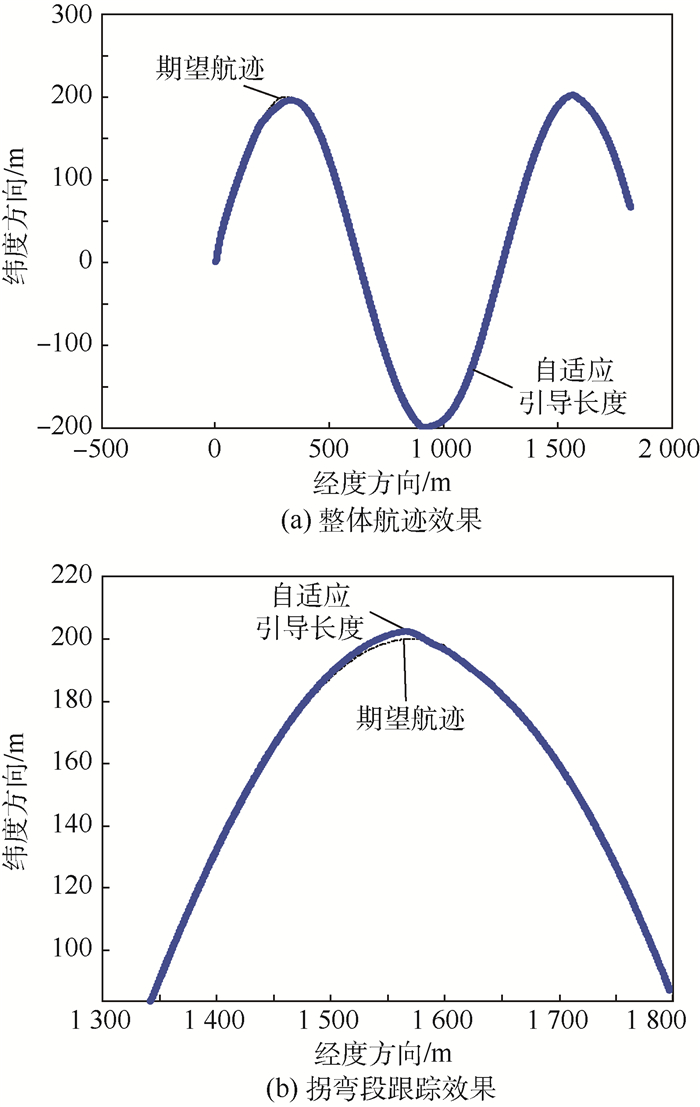
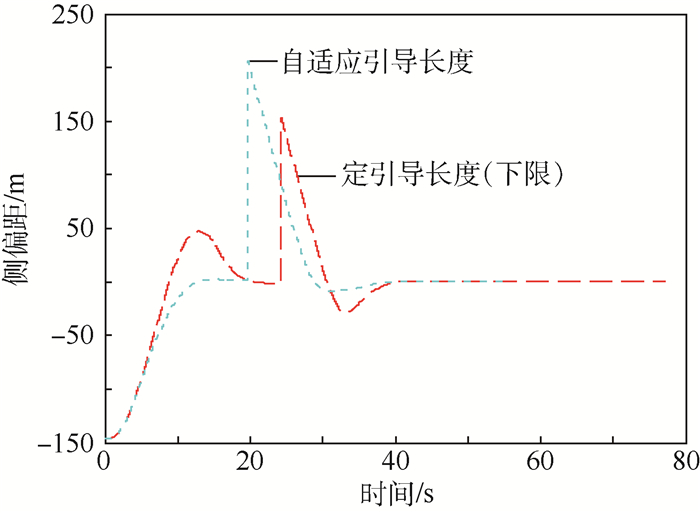
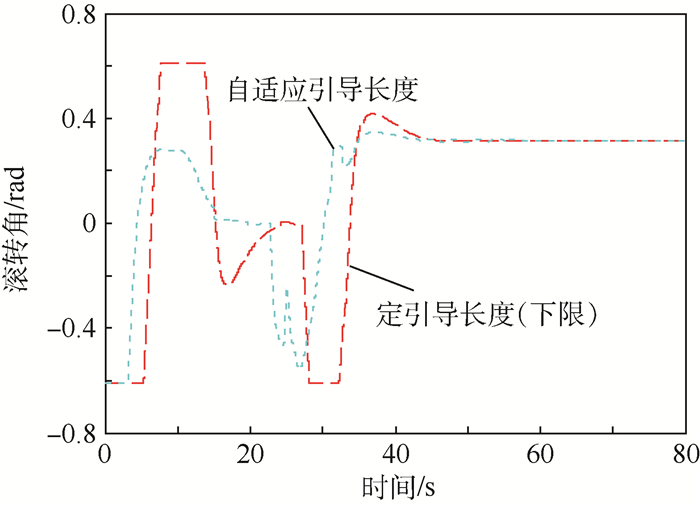
图 17 定引导长度与自适应引导长度航迹对比
Figure 17. Comparison of flight track between fixed guidance length and adaptive guidance length
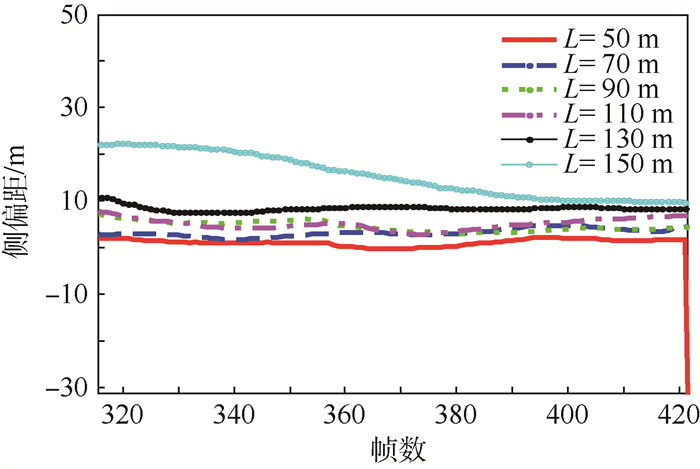
表 1 稳定跟踪过程精度
Table 1. Accuracy of stable tracking process
L/m 侧偏距的均方根/m 50 1.148 2 70 3.740 0 90 4.674 5 110 5.361 7 130 8.245 1 150 9.243 7  下载: 导出CSV
下载: 导出CSV
-
[1] TAKESHI Y, KEISUKE E, HIROYUKI T.Advanced pure pursuit guidance via sliding mode approach for chase UAV[C]//AIAA Guidance, Navigation, and Control Conference.Reston: AIAA, 2009:6298-6304. [2] SUJIT P B, SRIKANTH S, JOAO B S.An evaluation of UAV path following algorithms[C]//European Control Conference.Piscataway, NJ:IEEE Press, 2013:3332-3337. [3] HECHT C.Homing guidance using angular acceleration of the line of sight[R].Reston: AIAA, 1976: 2701-2706. [4] SUN M, ZHU R, YANG X.UAV path generation path following and gimbal control[C]// IEEE International Conference of Networking, Sensing and Control.Piscataway, NJ:IEEE Press, 2008:870-873. [5] RHEE I, PARK S, RYOO C K.A tight path following algorithm of an UAS based on PID control[C]//SICE Annual Conference, IEEE.Piscataway, NJ:IEEE Press, 2010:1270-1273. [6] LI C Y, JING W X.Application of PID controller to 2d differential geometric guidance problem[J].Journal of Control Theory and Applications, 2007, 5(3):285-290. [7] 吴国强. 无人机航迹跟踪控制方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2010: 24-48.WU G Q.The study of UAV flight path tracking control method[D].Harbin:Harbin Engineering University, 2010:24-48(in Chinese). [8] RYSDYK R.UAV path following for constant line-of-sight[C]//AIAA"Unmanned Unlimited" Systems Technologies & Operations Aerospace Land & Sea Conference.Reston: AIAA, 2003:6626-6636. [9] OTHARI M, POSTLETHWAITE L, GU D W.UAV path following in windy urban environments[J].Journal of Intelligent & Robotic Systens, 2014 74(3-4):1013-1028. [10] DALE A L, ERIC W F, WILLIAM J P.Lyapunov vector fields for autonomous UAV flight control[J].Journal of Guidance, Control, and Dynamics, 2008, 31(5):1220-1229. [11] NELSON D R, BARBER D B, MCLAIN T W, et al.Vector field path following for miniature air vehicles[J].IEEE Transactions on Robotics, 2007, 23(3):519-529. [12] SANGHYUK P, JOHN D, JONATHAN P H.A new nonlinear guidance logic for trajectory tracking[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit.Reston:AIAA, 2004:1-16. [13] SANGHYUK P, JOHN D, JONATHAN P H.Performance and Lyapunov stability of a nonlinear path-following guidance method[J].Journal of Guidance, Control, and Dynamics, 2007, 30(6):1718-1728. [14] OSBOME J, RYSDYK R.Waypoint guidance for small UAVs in wind[C]//AIAA Infotech, Aerospace Conference, Arlington.Reston:AIAA, 2005:459-470. [15] MAO Y H, CHEN Q Y, HOU Z X, et al.An improved nonlinear guidance law for unmanned aerial vehicles path following[C]//Proceedings of the 34th Chinese Control Conference.Piscataway, NJ:IEEE Press, 2015:5271-5276. [16] 方振平, 陈万春, 张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社, 2005:20-32.FANG Z P, CHEN W C, ZHANG S G.Flight dynamics for aircraft[M].Beijing:Beihang University Press, 2005:20-32(in Chinese). [17] 董芳. 无人机航迹跟踪技术的研究[D]. 南京: 南京航空航天大学, 2010: 37-42.DONG F.Research on path tracking technology of UAV[D].Nanjing:Nanjing University of Aeronautics and Astronautics, 2010:37-42(in Chinese). [18] 吴森堂, 费玉华.飞行控制系统[M].北京:北京航空航天大学出版社, 2006:75-77, 94-100.WU S T, FEI Y H.Flight control system[M].Beijing: Beihang University Press, 2006:75-77, 94-100(in Chinese). [19] 关键. 低速无人机动态气动特性数值模拟及布局研究[D]. 长沙: 国防科学技术大学, 2013: 40-62.GUAN J.The numerical research on transient aerodynamic performances and configurations of low speed UAVs[D].Changsha:National University of Defense Technology, 2013:40-62(in Chinese). [20] 胡寿松.自动控制原理[M].北京:科学出版社, 2013:56-70.HU S S.Automatic control principle[M].Beijing: Science Press, 2013:56-70(in Chinese). -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 1819
- HTML全文浏览量: 392
- PDF下载量: 596
- 被引次数: 0
