



-
摘要:
针对标准交互式多模型粒子滤波(IMMPF)算法中存在粒子退化及多样性匮乏问题,提出了交互式多模型粒子滤波优化重采样(IMMPFOR)算法,利用线性优化理论改善模型中具有小权值的粒子精度。该算法的新颖性体现在给定量测信息条件下,利用线性优化方法及模型交互概率将每个模型中拥有小权值的粒子替换成新的粒子。新的粒子既包含本模型中粒子信息,又包含了本模型与其他模型交互后的粒子信息。目标跟踪的仿真结果证明:每个模型新产生的粒子集合可以准确地近似真实状态后验概率密度函数,系统的估计精度与标准IMMPF算法相比有较大提升。
Abstract:For the problem of particles degeneration and lack of diversity in standard interacting multiple model particle filter (IMMPF) algorithm, a novel algorithm is presented, which is referred to as interacting multiple model particle filter optimization resampling (IMMPFOR) algorithm using linear optimization method in each model to improve the small-weight particles. The novelty of this algorithm lies in replacing the small-weight particles with new particles after the measurement information is received. New particles contain not only the information of the particles in the current model, but also the information of the particles in interacting models. The tracking simulation results show that the posterior probability density function of each model with newly generated set of particles accurately approximates the real state posterior probability density function, and the estimation accuracy of IMMPFOR is higher than the standard IMMPF algorithm.
-
Key words:
- interacting multiple models /
- particle filter /
- linear optimization /
- resampling /
- particle degeneration
-

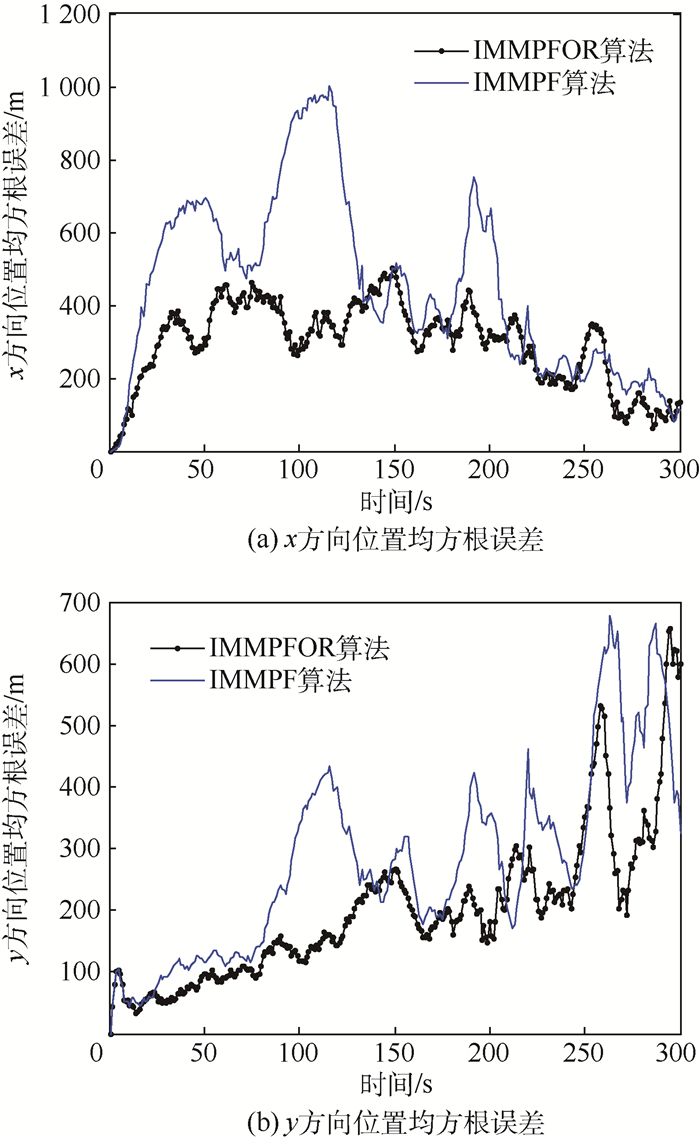
图 5 N=2 000时位置和速度均方根误差曲线
Figure 5. Curves of root mean square error in position and velocity at N=2 000
表 1 位置均方根误差峰值和均值(N=500)
Table 1. Peak and average of root mean square error in distance (N=500)
算法 RMSE/m 峰值 均值 IMMPF 910.1 420.7 IMMPFOR 552.4 312.3  下载: 导出CSV
下载: 导出CSV
-
[1] SEAH C E, HWANG I.State estimation for stochastic linear hybrid systems with continuous state dependent transitions: An IMM approach [J].IEEE Transactions on Aerospace & Electronics Systems, 2009, 45(1):376-392. [2] BLOM H A P, BAR-SHALOM Y.The interacting multiple model algorithm for systems with Markovian switching coefficients [J].IEEE Transactions on Automatic Control, 1988, 33(8):780-783. [3] VIVONE G, BRACA P, HORSTMANN J.Variable structure interacting multiple model algorithm for ship tracking using HF surface wave radar data[C]// Oceans-2015.Piscataway, NJ:IEEE Press, 2015:1-8. [4] ZHOU W, LIU M.Robust interacting multiple model algorithms based on multi-sensor fusion criteria [J].International Journal of Systems Science, 2016, 47(1):92-106. [5] 朱志宇.粒子滤波算法及其应用[M].北京:科学出版社, 2010.ZHU Z Y.Particle filter algorithm and its application[M].Beijing:Science Press, 2010(in Chinese). [6] GORDON N J, SALMOND D J, SMITH A F M.Novel approach to nonlinear/non-Gaussian Bayesian state estimation [J].IEEE Proceedings F-Radar & Signal Processing, 1993, 140(2):107-113. [7] BOERS Y, DRIESSEN J N.Interacting multiple model particle filter [J].IEE Proceedings-Radar, Sonar and Navigation, 2003, 150(5):344-349. [8] 王晓, 韩崇昭.基于混合采样的多模型机动目标跟踪算法[J].自动化学报, 2013, 39(7):1152-1156. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201307024.htmWANG X, HAN C Z.A multiple model particle filter for maneuvering target tracking based on composite sampling[J].Acta Automatica Sinica, 2013, 39(7):1152-1156(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201307024.htm [9] 王伟, 余玉揆.多点测试的多模型机动目标跟踪算法[J].自动化学报, 2015, 41(6):1201-1212. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201506014.htmWANG W, YU Y K.Multi-try and multi-model particle filter for maneuvering target tracking[J].Acta Automatica Sinica, 2015, 41(6):1201-1212(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201506014.htm [10] MCGINNITY S, IRWIN G W.Multiple model bootstrap filter for maneuvering target tracking [J].IEEE Transactions on Aerospace & Electronics Systems, 2000, 36(3):1006-1012. [11] VAN DER MERWE R, DOUCET A, DE FREITAS N, et al.The unscented particle filter [J].Advances in Neural Information Processing Systems, 2000, 13:584-590. [12] MUSSO C, OUDJANE N, LE GRAND F.Improving regularized particle filters[M]//DOUCET A, DE FREITAS N, GORDON N.Sequential Monte Carlo method in practice.New York:Springer-Verlag, 2001:247-271. [13] TANIZAKI H.Nonlinear filters based on Taylor series expansion [M]// TANIZAKI H.Nonlinear filters:Estimation and applications.Berlin:Springer, 1993, 25(6):81-88. [14] LIU J S, CHEN R.Sequential Monte Carlo methods for dynamic systems [J].Journal of the American Statistical Association, 1998, 93(443):1032-1044. [15] 邹国辉, 敬忠良, 胡洪涛.基于优化组合重采样的粒子滤波算法[J].上海交通大学学报, 2006, 40(7):1135-1139. http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT200607014.htmZOU G H, JING Z L, HU H T.A particle filter algorithm based on optimizing combination resampling[J].Journal of Shanghai Jiaotong University, 2006, 40(7):1135-1139(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT200607014.htm -

 下载:
下载:




 点击查看大图
点击查看大图

计量
- 文章访问数: 1566
- HTML全文浏览量: 293
- PDF下载量: 508
- 被引次数: 0
