



-
摘要:
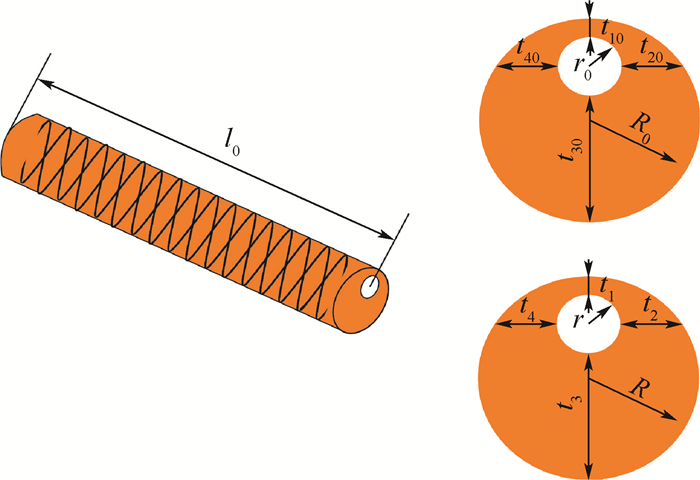
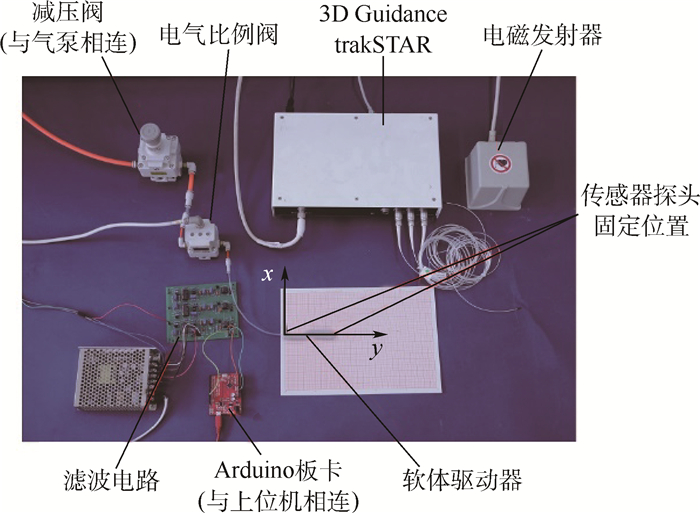
与传统的“刚性”机器人相比,基于仿生学启发的软体机器人由于其与生俱来的柔顺性和安全性受到广泛关注。然而,此类软体机器人驱动器的设计与控制目前仍缺少理论指导。针对这些问题,设计了一种由气压驱动的可实现弯曲运动的新型软体驱动器,在系统分析其结构和弯曲原理的基础上,利用几何方法和虚功原理建立了其数学模型,并且通过有限元模型和原理样机实验验证了数学模型的有效性,为软体机器人驱动器的优化设计和控制提供了依据。
Abstract:Compared with traditional "rigid" robots, soft robots inspired by biology have been of particular interest to the robotic communities due to their inherent compliance and safety. However, the actuation and control of the soft actuators for such soft robotics are still lacking of theoretical investigation. For these issues, a pneumatic actuator was designed to achieve compliant motions for use in soft robots. The mathematical model was then developed based on the analysis of its structure and bending principle utilizing the geometric analysis and the principle of virtual work. The model were finally validated by finite element model and prototype experiments, and can be used for the future design and control of soft robotic actuators.
-
Key words:
- soft actuator /
- pneumatic actuation /
- bending deformation /
- mathematical model /
- finite element analysis
-

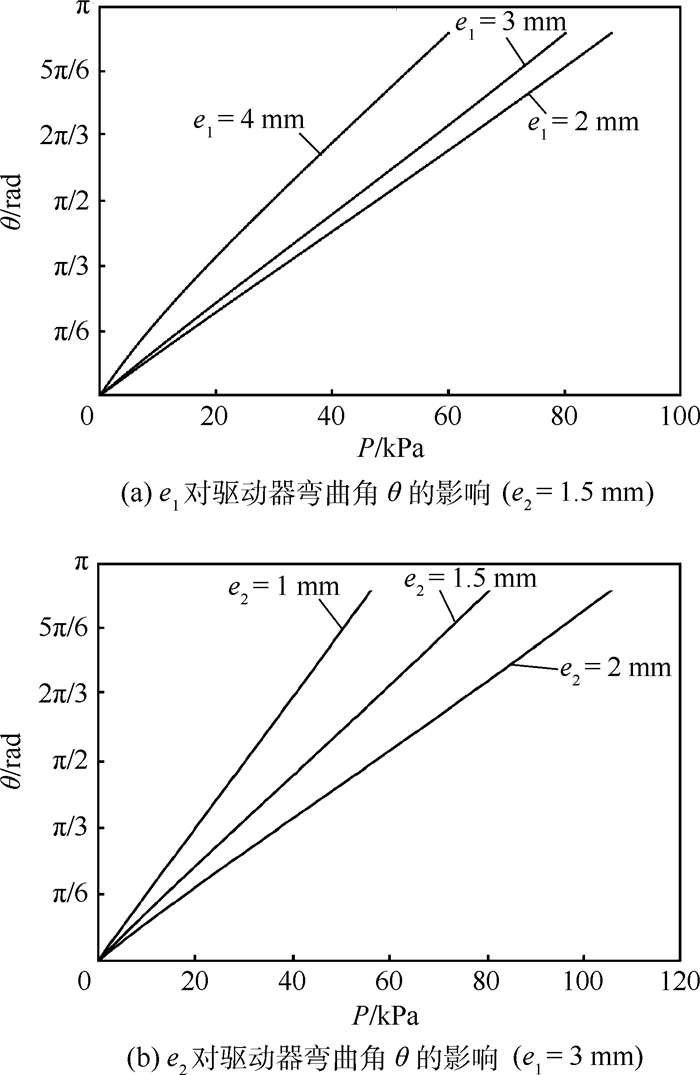
图 6 偏心距对驱动器弯曲角θ的影响
Figure 6. Influence of eccentric distance on bending angle θ of actuator

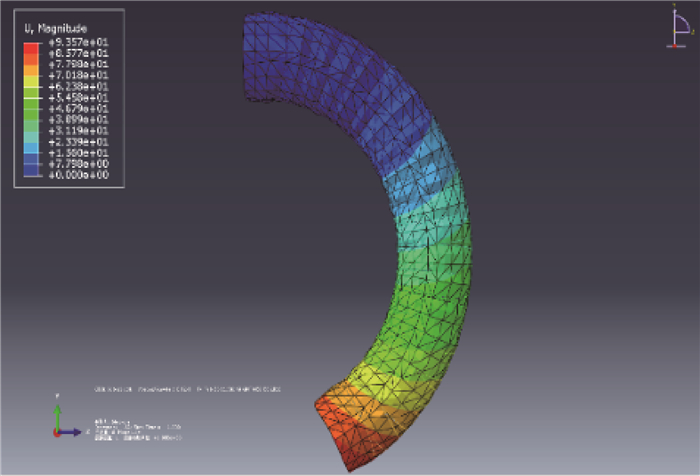
图 7 有限元模型中P=80 kPa下驱动器状态
Figure 7. State of actuator in finite element model at P=80 kPa

图 10 不同气压下软体驱动器末端位移
Figure 10. Tip displacement of soft actuator in different pressure
表 1 软体驱动器设计参数
Table 1. Parameters for soft actuator design
参数 数值 长度l0/mm 80 驱动器半径R0/mm 6.5 空腔内径r0/mm 1.5 空腔圆心偏离驱动器中心距离e1/mm 3 不可伸长面与驱动器中心间距离e2/mm 1.5 绕线圈数N 28 绕线螺旋角/(°) 5 质量/kg 0.017  下载: 导出CSV
下载: 导出CSV
-
[1] ROBINSON G, DAVIES J B C. Continuum robots-A state of the art [C]//1999 IEEE International Conference on Robotics and Automation.Piscataway, NJ:IEEE Press, 1999, 4:2849-2854. [2] TRIVEDI D, RAHN C D, KIER W M, et al. Soft robotics:Biological inspiration, state of the art, and future research [J].Applied Bionics and Biomechanics, 2008, 5(3):99-117. [3] KIM S, LASCHI C, TRIMMER B.Soft robotics:A bioinspired evolution in robotics [J].Trends in Biotechnology, 2013, 31(5):287-294. [4] RUS D, TOLLEY M T.Design, fabrication and control of soft robots [J].Nature, 2015, 521(7553):467-475. [5] 曹玉君, 尚建忠, 梁科山, 等.软体机器人研究现状综述[J].机械工程学报, 2012, 48(3):25-33. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201203005.htmCAO Y J, SHANG J Z, LIANG K S, et al.Review of soft-bodied robots [J].Journal of Mechanical Engineering, 2012, 48(3):25-33(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB201203005.htm [6] ILIEVSKI F, MAZZEO A D, SHEPHERD R F, et al.Soft robotics for chemists[J].Angewandte Chemie International Edition, 2011, 50(8):1890-1895. [7] SEOK S, ONAL C D, CHO K J, et al.Meshworm:A peristaltic soft robot with antagonistic nickel titanium coil actuators [J].IEEE/ASME Transactions on Mechatronics, 2013, 18(5):1485-1497. [8] CAMARILLO D B, MILNE C F, CARLSON C R, et al.Mechanics modeling of tendon-driven continuum manipulators[J].IEEE Transactions on Robotics, 2008, 24(6):1262-1273. [9] CIANCHETTI M, MATTOLI V, MAZZOLAI B, et al.A new design methodology of electrostrictive actuators for bio-inspired robotics[J].Sensors and Actuators B:Chemical, 2009, 142(1):288-297. [10] BARTOW A, KAPADIA A, WALKER I D.A novel continuum trunk robot based on contractor muscles[C]//Proceedings of the 12th WSEAS International Conference on Signal Processing, Robotics, and Automation.Cambridge:WSEAS Press, 2013:181-186. [11] MOSADEGH B, POLYGERINOS P, KEPLINGER C, et al.Pneumatic networks for soft robotics that actuate rapidly[J].Advanced Functional Materials, 2014, 24(15):2163-2170. [12] JONES B A, WALKER I D.Kinematics for multisection continuum robots[J].IEEE Transactions on Robotics, 2006, 22(1):43-55. [13] POLYGERINOS P, WANG Z, OVERVELDE J T B, et al.Modeling of soft fiber-reinforced bending actuators [J].IEEE Transa-ctions on Robotics, 2015, 31(3):778-789. [14] 马建旭, 李明东, 包志军, 等.仿蚯蚓蠕动微机器人及控制系统[J].上海交通大学学报, 1999, 33(7):855-857. http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT907.019.htmMA J X, LI M D, BAO Z J, et al.Microperistaltic robot simulating earthworm and its control system[J].Journal of Shanghai Jiaotong University, 1999, 33(7):855-857(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-SHJT907.019.htm [15] 王振龙, 杭观荣, 李健, 等.面向水下无声推进的形状记忆合金丝驱动柔性鳍单元[J].机械工程学报, 2009, 45(2):126-131. http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200902024.htmWANG Z L, HANG G R, LI J, et al.Shape memory alloy wire actuated flexible biomimetic fin for quiet underwater propulsion [J].Journal of Mechanical Engineering, 2009, 45(2):126-131 (in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200902024.htm [16] KANG R, BRANSON D T, ZHENG T, et al.Design, modeling and control of a pneumatically actuated manipulator inspired by biological continuum structures [J].Bioinspiration & Biomimetics, 2013, 8(3):036008. [17] BISHOP-MOSER J, KRISHNAN G, KIM C, et al.Design of soft robotic actuators using fluid-filled fiber-reinforced elastomeric enclosures in parallel combinations [C]//2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Piscataway, NJ:IEEE Press, 2012:4264-4269. [18] YEOH O H.Some forms of the strain energy function for rubber [J].Rubber Chemistry and Technology, 1993, 66(5):754-771. [19] KOTHERA C S, JANGID M, SIROHI J, et al.Experimental characterization and static modeling of McKibben actuators [J].Journal of Mechanical Design, 2009, 131(9):091010. [20] 黄建龙, 解广娟, 刘正伟.基于Mooney-Rivlin和Yeoh模型的超弹性橡胶材料有限元分析[J].橡胶工业, 2008, 55(8):467-470. http://www.cnki.com.cn/Article/CJFDTOTAL-XJJZ200812005.htmHUANG J L, XIE G J, LIU Z W.FEA of hyperelastic rubber material based on Mooney-Rivlin model and Yeoh model [J].China Rubber Industry, 2008, 55(8):467-470(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XJJZ200812005.htm [21] American Society for Testing and Materials.Standard test method for tensile properties of plastics:ASTM D638 [S].[S.l.]:ASTM, 2003. -

 下载:
下载:






 点击查看大图
点击查看大图

计量
- 文章访问数: 2509
- HTML全文浏览量: 639
- PDF下载量: 765
- 被引次数: 0
