



Direct torque control of switched reluctance motor based on adaptive second-order terminal sliding mode
-
摘要:
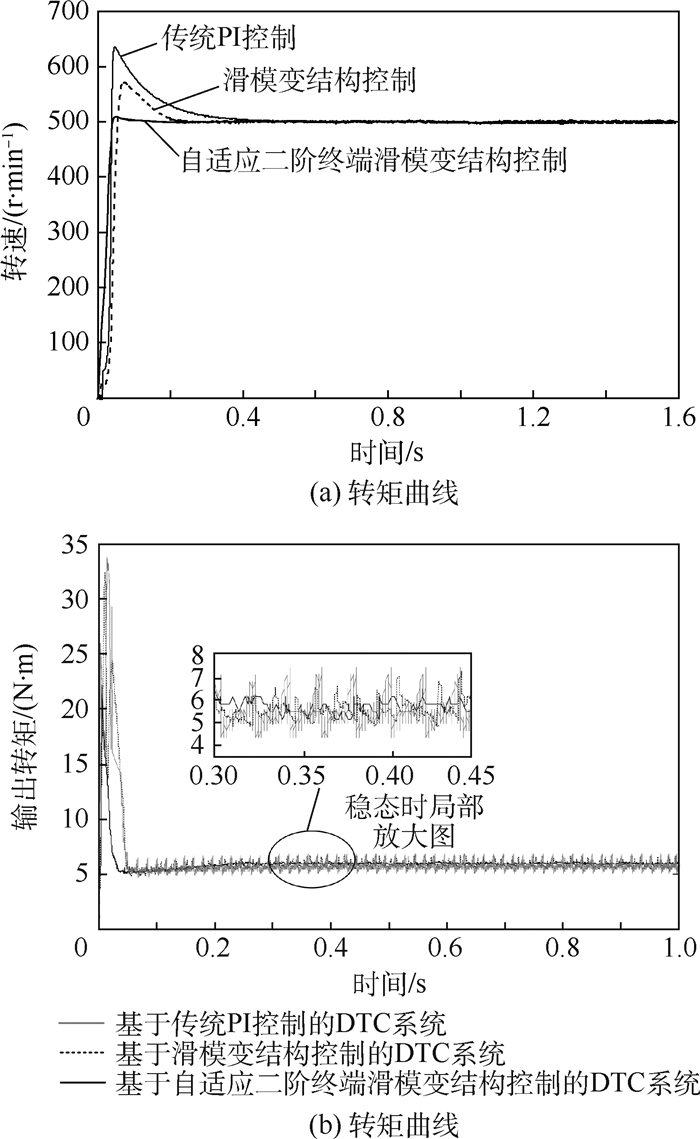
传统的直接转矩控制(DTC)可以在一定程度上减小开关磁阻电机(SRM)的转矩脉动,但是在换相区的转矩脉动抑制效果较差,并且传统的PI控制存在超调量大、鲁棒性差、抗负载扰动能力有限的缺点。因此,设计了基于负载转矩变化率自适应估计的二阶终端滑模转速控制器,在有限时间内使得系统状态迅速收敛到平衡点,实现无需已知扰动上界快速输出给定转矩。此外,对传统的扇区规则进行改进以优化电压矢量的选取,减少由于换相产生的转矩脉动。仿真和实验结果表明:改进后的DTC系统拥有良好的调速控制性能,抗干扰能力强,鲁棒性好,能进一步减少转矩脉动。
-
关键词:
- 直接转矩控制(DTC) /
- 开关磁阻电机(SRM) /
- 二阶终端滑模 /
- 扇区细分 /
- 自适应估计 /
- 鲁棒性
Abstract:The torque ripple of switched reluctance motor (SRM) can be reduced to some extent by traditional direct torque control (DTC), but the torque ripple suppression effect is poor in the commutation zone. And the traditional PI control has disadvantages of large overshoot, poor robustness and limited anti-disturbance ability. Therefore, a second-order terminal sliding speed controller based on adaptive estimation of load torque change rate was designed, which made the state of the system quickly converge to the equilibrium point within a finite time. The controller will output the reference torque without the upper bound of the perturbation. In addition, an improved sector segmentation method was used to optimize the voltage vector selection principle in order to reduce the torque ripple which resulted from the commutation. The simulation and experimental results show that the improved DTC system has good speed and control characteristics, strong anti-interference capability and good robustness, which can further reduce the torque ripple.
-

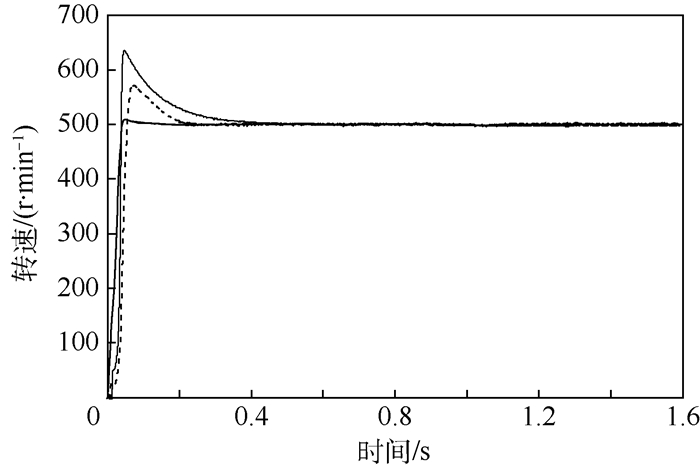
图 6 3种控制方式转速和输出转矩曲线对比
Figure 6. Comparison of curves of speed and output torque of three control modes

图 10 转速为1 500 r/min时转速和输出转矩波形
Figure 10. Speed and output torque waveform at 1 500 r/min
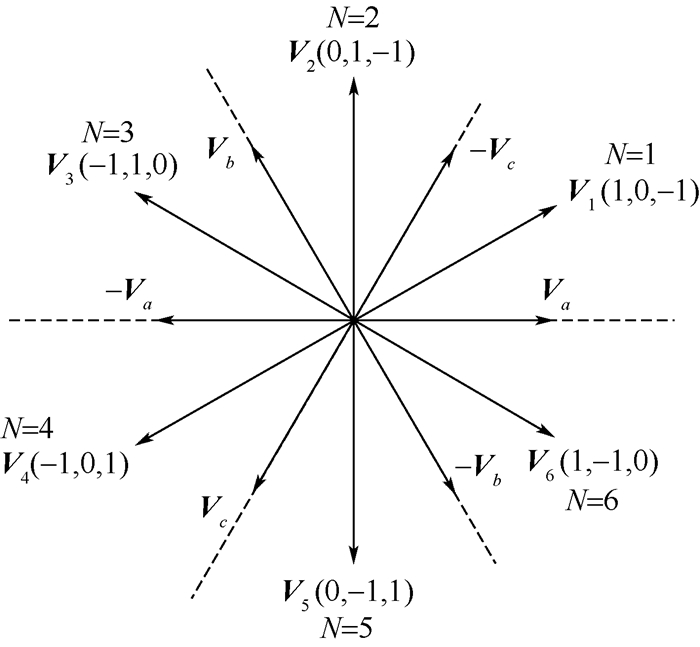
表 1 电压矢量选取规则
Table 1. Voltage vector selection principle
转矩和磁链变化 电压矢量 T↑, ψ↑ VN+1 T↑, ψ↓ VN+2 T↓, ψ↑ VN-1 T↓, ψ↓ VN-2  下载: 导出CSV
下载: 导出CSV
表 2 合成磁链幅值变化
Table 2. Change of synthetic flux-linkage amplitude
θ/(°) θvψ1/(°) θvψ2/(°) 加V2后磁链幅值变化量/Wb 加V3后磁链幅值变化量/Wb 0 90 150 0 -0.866x 10 80 140 0.174x -0.766x 20 70 130 0.342x -0.643x 30 60 120 0.5x -0.5x 40 50 110 0.643x -0.342x 50 40 100 0.766x -0.174x 60 30 90 0.866x 0 注:θvψ1为电压矢量V2与磁链的夹角; θvψ2为电压矢量V3与磁链的夹角。
下载: 导出CSV
表 3 基于扇区细分方法优化电压矢量选取
Table 3. Voltage vector selection optimization based on sector segmentation method
变化需求 区域N(N=1, 2, …, 6) NA NB NC ψ↑ T↑
T↓VN
VN-1VN+1
VN-1VN+1
VNψ↓ T↑
T↓VN+2
VN+3VN+2
VN+4VN+3
VN+4
下载: 导出CSV
-
[1] 刘勇智, 周政, 盛增津, 等.开关磁阻电机起动/发电状态切换控制策略研究[J].电机与控制学报, 2015, 19(10):57-63.LIU Y Z, ZHOU Z, SHENG Z J, et al.Study of control strategy for status switching of switched reluctance starter/generator[J].Electric Machines and Control, 2015, 19(10):57-63(in Chinese). [2] 赵旭升, 邓智泉, 汪波.一种磁悬浮开关磁阻电机用轴向径向磁轴承[J].北京航空航天大学学报, 2011, 37(8):973-978.ZHAO X S, DENG Z Q, WANG B.Axial radial magnetic bearing in magnetic suspending switched reluctance motor application[J].Journal of Beijing University of Aeronautics and Astronautics, 2011, 37(8):973-978(in Chinese). [3] 昝小舒, 陈昊.开关磁阻起动/发电系统起动性能研究[J].电工技术学报, 2015, 30(20):21-29.ZAN X S, CHEN H.Study on starting performance of switched reluctance starter/generator system[J].Transactions of China Electrotechnical Society, 2015, 30(20):21-29(in Chinese). [4] SONG S J, LIU W G, DIETER P, et al.Detailed design of a high speed switched reluctance starter/generator[J].Chinese Journal of Aeronautics, 2010, 23(2):216-226. [5] 宋受俊, 葛乐飞, 刘虎成, 等.开关磁阻电机设计及多目标优化方法[J].电工技术学报, 2014, 29(5):197-204.SONG S J, GE L F, LIU H C, et al.Design and multi-objective optimization method of switched reluctance machines[J].Transactions of China Electrotechnical Society, 2014, 29(5):197-204(in Chinese). [6] ANNEGRET K, ANDREAS H, RIK W.Direct instantaneous torque and force control:A control approach for switched reluctance machines[J].IET Electric Power Applications, 2017, 11(5):935-943. [7] 朱叶盛, 章国宝, 黄永明.基于PWM的开关磁阻电机直接转矩控制[J].电工技术学报, 2017, 32(7):31-39.ZHU Y S, ZHANG G B, HUANG Y M.PWM-based direct instantaneous torque control of switched reluctance machine[J].Transactions of China Electrotechnical Society, 2017, 32(7):31-39(in Chinese). [8] 王玉林.开关磁阻电机直接转矩控制的研究[D].杭州: 浙江大学, 2016.WANG Y L.Research on direct instantaneous torque control of switched reluctance motor[D].Hangzhou: Zhejiang University, 2016(in Chinese). [9] 王勉华, 梁媛媛.开关磁阻电机直接转矩模糊PI控制器的设计[J].电气传动, 2010, 40(1):51-54.WANG M H, LIANG Y Y.Fuzzy-PI controller for direct torque control drives system of SRM[J].Electric Drive, 2010, 40(1):51-54(in Chinese). [10] 刘勇智, 王宇, 朱晨承.采用模糊逻辑修正的SRM滑模控制器设计[J].计算机测量与控制, 2014, 22(7):2059-2062.LIU Y Z, WANG Y, ZHU C C.Sliding mode controller of SRM combined with fuzzy logic correction[J].Computer Measurement & Control, 2014, 22(7):2059-2062(in Chinese). [11] 刘慧武.开关磁阻电机直接转矩控制系统的研究[D].哈尔滨: 哈尔滨理工大学, 2014.LIU H W.Research on switched reluctance motor direct torque control system[D].Harbin: Harbin University of Science and Technology, 2014(in Chinese). [12] 赵洋.开关磁阻电机直接转矩控制技术研究[D].成都: 西南交通大学, 2016.ZHAO Y.Research on DTC of switched reluctance motor[D].Chengdu: Southwest Jiaotong University, 2016(in Chinese). [13] 王冕华, 邢幸.开关磁阻电机直接转矩滑模变结构控制[J].电机与控制应用, 2017, 44(6):35-39.WANG M H, XING X.Sliding mode variable structure controller for direct torque control drive system of switched reluctance motor[J].Electric Machines & Control Application, 2017, 44(6):35-39(in Chinese). [14] 喻晓军.基于SMO的矿用电机车调速系统设计[D].淮南: 安徽理工大学, 2015.YU X J.Research of mining accumulator locomotive speed control system based on SMO[D].Huainan: Anhui University of Science and Technology, 2015(in Chinese). [15] 吴红星.开关磁阻电机系统理论与控制技术[M].北京:中国电力出版社, 2010.WU H X.Theory and control technology of switched reluctance motor system[M].Beijing:China Electric Power Press, 2010(in Chinese). -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 1395
- HTML全文浏览量: 171
- PDF下载量: 568
- 被引次数: 0
